") 變革中的數(shù)據(jù)中心對自動駕駛的影響
變革中的數(shù)據(jù)中心對自動駕駛的影響

堵在早高峰的你,手握方向盤卻寸步難行
看著老板的電話
你是不是開始思考
我什么時候能開上“馬路飛行器”?
如今,一輛自動駕駛汽車每1.5個小時可以產(chǎn)生4TB數(shù)據(jù),而到2020年,3000個互聯(lián)網(wǎng)用戶每天才會產(chǎn)生同等數(shù)量的數(shù)據(jù)。
“無人駕駛行業(yè)面臨最大的挑戰(zhàn)就是數(shù)據(jù)處理,我們對此信心充足。英特爾深知數(shù)據(jù)的多樣性,比如攝像頭產(chǎn)生的數(shù)據(jù)、激光雷達(dá)產(chǎn)生的數(shù)據(jù),所以我們希望對癥下藥,打造覆蓋端到端的靈活、擴(kuò)展的架構(gòu)。”英特爾公司無人駕駛解決方案資深首席工程師兼首席系統(tǒng)架構(gòu)師Jack Weast說。
自動駕駛的后端支撐:變革中的數(shù)據(jù)中心架構(gòu)
如今,自動駕駛測試過程中產(chǎn)生的數(shù)據(jù),很大程度上會被拷貝進(jìn)數(shù)據(jù)中心,而對于數(shù)據(jù)中心如何處理數(shù)據(jù),新的計(jì)算架構(gòu)將發(fā)揮重要作用。
英特爾認(rèn)為,數(shù)據(jù)中心對于數(shù)據(jù)的處理存在5個不同的階段:
第一,進(jìn)行數(shù)據(jù)的存儲和管理和歸檔;
第二,對數(shù)據(jù)進(jìn)行詳盡地分析,為后續(xù)數(shù)據(jù)洞察的獲取打下堅(jiān)實(shí)的基礎(chǔ);
“當(dāng)開發(fā)者需要某個特殊情境下的詳細(xì)數(shù)據(jù),數(shù)據(jù)中心如何快速地調(diào)取此類數(shù)據(jù),就需要前期很好的歸檔和數(shù)據(jù)分析。”
—— Jack Weast
第三,人工智能和機(jī)器學(xué)習(xí)算法的訓(xùn)練階段,英特爾的創(chuàng)新產(chǎn)品將加速原來的訓(xùn)練時間;
第四,為軟件開發(fā)者提供豐富的數(shù)據(jù)集,幫助軟件工程師開發(fā)更適用于實(shí)際情況的應(yīng)用;
第五階段 數(shù)據(jù)的模擬,最終算法將被整合進(jìn)自動駕駛汽車系統(tǒng);
“我們特別重視且關(guān)注數(shù)據(jù)挑戰(zhàn),尤其是要分清數(shù)據(jù)的種類,這樣我們才能知道最佳的處理數(shù)據(jù)的方式。”Jack Weast說,“所以對我們來說,不是選擇一種、放棄其他,而是給你提供多種選擇。”
英特爾為不同種類的數(shù)據(jù)提供了全面的解決方案,包含英特爾至強(qiáng)可擴(kuò)展處理器、英特爾至強(qiáng)融核 產(chǎn)品家族和FPGA在內(nèi)的計(jì)算產(chǎn)品將為不同的數(shù)據(jù)類型提供不同的后端解決方案。而在數(shù)據(jù)中心的存儲和網(wǎng)絡(luò)方面,英特爾也有高品質(zhì)的固態(tài)盤和高速互聯(lián)網(wǎng)絡(luò)等解決方案。
但是數(shù)據(jù)中心的技術(shù)變革還遠(yuǎn)遠(yuǎn)不夠,自動駕駛的數(shù)據(jù)需要邁向復(fù)雜的路網(wǎng)和飛速行駛的汽車內(nèi)部。
前端革新,讓自動駕駛汽車公路飛馳
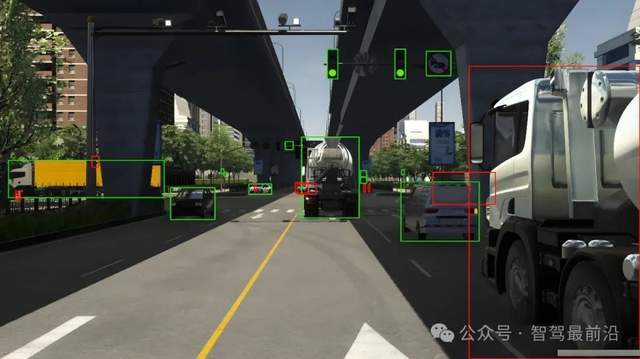
瞬息萬變的路況不允許數(shù)據(jù)處理的稍加延遲,自動駕駛汽車需要最快速地做出準(zhǔn)確的判斷。
僅就圖像處理而言,一輛自動駕駛汽車的中央融合單元必須能將攝像頭、激光雷達(dá)和雷達(dá)收集來的數(shù)據(jù)相結(jié)合,刨除數(shù)據(jù)中的空白和重疊,最終生成 360 的車輛視角。這類圖像數(shù)據(jù)處理需要更先進(jìn)的算法。
對此,全新的英特爾GO 自動駕駛開發(fā)平臺提供了一種靈活的架構(gòu),包括中央處理單元(CPU)、現(xiàn)場可編程門陣列(FPGA)及面向深度學(xué)習(xí)的硬件加速技術(shù)。這種架構(gòu)同時具有獨(dú)特、優(yōu)化的并行和順序處理能力。通過將英特爾凌動 處理器、英特爾至強(qiáng)處理器、英特爾Arria10 FPGA 進(jìn)行靈活組合,英特爾提供各種各樣的計(jì)算元件,可適應(yīng)不斷變化的設(shè)計(jì)。
5G,創(chuàng)造汽車交流的V2X橋梁
為了支持 V2X(vehicle to everything,汽車連接一切)通信、無線更新和全新的車載體驗(yàn),汽車提供商將需要不斷提高數(shù)據(jù)傳輸速度,并將汽車操作的響應(yīng)時間從數(shù)秒進(jìn)一步縮短至幾毫秒。
而5G帶來的數(shù)據(jù)傳輸速度的提升、網(wǎng)絡(luò)覆蓋范圍的擴(kuò)展和接入設(shè)備數(shù)量的增長,將為具備大量數(shù)據(jù)傳輸需求的自動駕駛汽車創(chuàng)造網(wǎng)絡(luò)基礎(chǔ)。
在5G方面,英特爾同樣是行業(yè)內(nèi)的領(lǐng)先企業(yè)之一。英特爾GO 5G 汽車平臺能夠提供包括固件實(shí)時更新、車載信息娛樂系統(tǒng)內(nèi)容更新等重要用例。
“在不久的將來,5G 技術(shù)將成為 V2V 通訊的主干技術(shù),借助超高的傳輸速度,后面跟隨的車輛就能看到車隊(duì)前方車輛傳來的實(shí)時畫面。” Jack Weast預(yù)測。
從后端覆蓋計(jì)算、存儲、網(wǎng)絡(luò)的數(shù)據(jù)中心數(shù)據(jù)處理,到前端的車載解決方案的創(chuàng)新突破,英特爾為自動駕駛的創(chuàng)新迭代提供了性能更高效、拓展更簡易,開發(fā)更便捷的軟硬件解決方案,隨著萬物互聯(lián)的世界到來,這將成為自動駕駛技術(shù)創(chuàng)新和應(yīng)用落地的可靠基石。
-
圖像處理
+關(guān)注
關(guān)注
29文章
1342瀏覽量
59530 -
數(shù)據(jù)中心
+關(guān)注
關(guān)注
18文章
5651瀏覽量
75018 -
數(shù)據(jù)處理
+關(guān)注
關(guān)注
0文章
648瀏覽量
29987
發(fā)布評論請先 登錄
自動駕駛汽車如何實(shí)現(xiàn)自動駕駛

1分鐘帶你了解數(shù)據(jù)中心供電架構(gòu) #電子元器件 #數(shù)據(jù)中心 #供電架構(gòu)
如何設(shè)計(jì)好自動駕駛ODD?
高程數(shù)據(jù)在自動駕駛中有什么作用?
自動駕駛數(shù)據(jù)標(biāo)注主要是標(biāo)注什么?
什么是自動駕駛數(shù)據(jù)標(biāo)注?如何好做數(shù)據(jù)標(biāo)注?

自動駕駛汽車是如何準(zhǔn)確定位的?

卡車、礦車的自動駕駛和乘用車的自動駕駛在技術(shù)要求上有何不同?

華為數(shù)據(jù)中心自動駕駛網(wǎng)絡(luò)通過EANTC歐洲高級網(wǎng)絡(luò)測試中心L4級自智網(wǎng)絡(luò)測評

自動駕駛安全基石:ODD
新能源車軟件單元測試深度解析:自動駕駛系統(tǒng)視角

劉強(qiáng)東,進(jìn)軍汽車領(lǐng)域# 京東# 自動駕駛# 自動駕駛出租車# 京東自動駕駛快遞車
自動駕駛大模型中常提的Token是個啥?對自動駕駛有何影響?
Cadence顛覆AI數(shù)據(jù)中心設(shè)計(jì)




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論