") 關(guān)于TOF和雙目視覺的差異性分析
關(guān)于TOF和雙目視覺的差異性分析

那同樣是獲取場景中物體距離攝像頭物理距離的攝像方案,他們之間有什么不同的呢?
今天小編就跟大家來對比一下TOF 與 雙目視覺。
TOF Vs 雙目視覺
雙目視覺
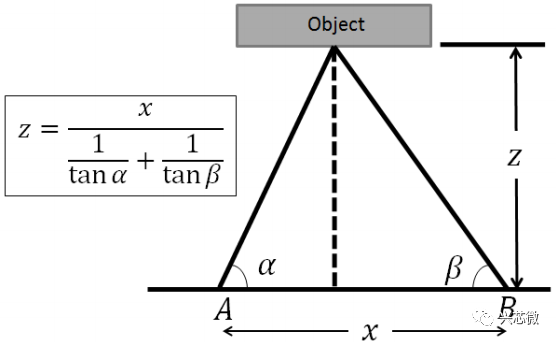
雙目立體視覺測距的原理和人眼類似,通過計(jì)算空間中同一個物體在兩個相機(jī)成像的視差就可以根據(jù)如下三角關(guān)系計(jì)算得到物體離相機(jī)的距離:
但是說起來容易,算法實(shí)現(xiàn)比較困難,雙目立體視覺測距算法的核心就是尋找對應(yīng)關(guān)系。可以理解為給定一個相機(jī)拍攝的圖片中的任意一個像素點(diǎn),如何在另外一個相機(jī)拍攝的圖像中找到和它對應(yīng)的像素點(diǎn),這個過程需要特征提取、特征匹配等一系列復(fù)雜的算法。但是由于光照變化、光線明暗等外在因素的影響,拍攝的兩張圖片差別可能比較大,這會對特征匹配算法提出很大的挑戰(zhàn)。如下圖是在不同光照條件下拍攝的圖片:
另外,如果拍攝的物體缺乏紋理和細(xì)節(jié)(比如拍攝一張白紙)的話,也很難進(jìn)行特征匹配。這些都對算法的魯棒性提出了很大的挑戰(zhàn)。
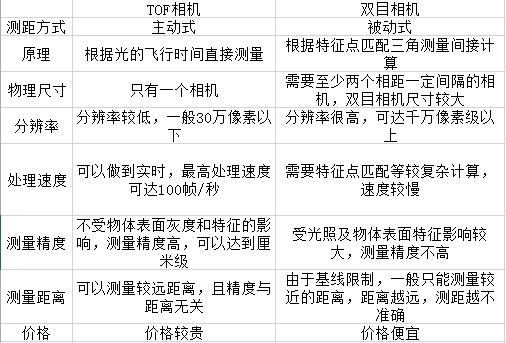
雖然TOF相機(jī)和雙目立體視覺都能實(shí)現(xiàn)測距的功能,但是它們還是有很大不同,在此我做了了簡單的表格如下:
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
測距
+關(guān)注
關(guān)注
2文章
115瀏覽量
20845 -
光照
+關(guān)注
關(guān)注
0文章
55瀏覽量
11368 -
雙目視覺
+關(guān)注
關(guān)注
2文章
39瀏覽量
14536
發(fā)布評論請先 登錄
相關(guān)推薦
熱點(diǎn)推薦
基于SoC的雙目視覺ADAS解決方案
相比于單目視覺,雙目視覺(Stereo Vision)的關(guān)鍵區(qū)別在于可以利用雙攝像頭從不同角度對同一目標(biāo)成像,從而獲取視差信息,推算目標(biāo)距離。
發(fā)表于 11-05 03:46
?3709次閱讀
鉅芯發(fā)布業(yè)內(nèi)首顆智能雙目視覺芯片
據(jù)麥姆斯咨詢報道,物聯(lián)網(wǎng)及雙目視覺專家鉅芯發(fā)布了一款智能雙目立體視覺系統(tǒng),以及業(yè)內(nèi)首顆智能雙目立體視覺芯片eagleye100。
【W(wǎng)RTnode2R申請】雙目視覺隨動平臺
申請理由:之前用wrtnode的u***接雙攝像頭外加一個么mcu實(shí)現(xiàn)過一個一個雙目視覺隨動平臺,這樣太麻煩了,希望能用這個來實(shí)現(xiàn)一個更簡單的解決方案。項(xiàng)目描述:u***接雙攝像頭,mcu控制云臺。通過WIFI將雙目視覺傳遞到手機(jī)進(jìn)行顯示,同時將手機(jī)的角度信息返回,控制云
發(fā)表于 09-10 11:25
基于SoC的雙目視覺ADAS解決方案
`相比于單目視覺,雙目視覺(Stereo Vision)的關(guān)鍵區(qū)別在于可以利用雙攝像頭從不同角度對同一目標(biāo)成像,從而獲取視差信息,推算目標(biāo)距離。恩智浦視覺ADAS專用SoC: S32V234未來十年
發(fā)表于 08-12 15:15
LabVIEW雙目視覺 【轉(zhuǎn)載】
` 本帖最后由 sszx2007 于 2020-3-2 17:04 編輯
LabVIEW雙目視覺原創(chuàng) 張冬斌 LabVIEW逆向工程高級編程 轉(zhuǎn)載至:https
發(fā)表于 03-02 17:03
線性穩(wěn)壓器和開關(guān)式穩(wěn)壓器的特性有什么差異性?
線性穩(wěn)壓器和開關(guān)式穩(wěn)壓器的特性有什么差異性?DCDC開關(guān)式穩(wěn)壓器有哪幾種類型?
發(fā)表于 03-08 07:59
基于神經(jīng)網(wǎng)絡(luò)的雙目視覺傳感器建模
根據(jù)雙目視覺傳感器的工作原理, 分析了影響測量精度的因素, 表明雙目視覺傳感器的物體空間坐標(biāo)與圖像坐標(biāo)之間存在復(fù)雜的非線性映射關(guān)系, 其數(shù)學(xué)模型無法用解析式精確地加以
發(fā)表于 07-10 15:53
?11次下載
雙目視覺立體匹配算法研究
雙日視覺是計(jì)算機(jī)視覺領(lǐng)域的一個重要組成部分。雙目視覺研究中的關(guān)鍵技術(shù)攝像機(jī)標(biāo)定和立體匹配一直是研究的熱點(diǎn)。本文由兩部分組成,分別對雙目視覺的算法和未標(biāo)定圖
發(fā)表于 08-14 16:41
?0次下載
模擬電路設(shè)計(jì)使HDTV體現(xiàn)出差異性
模擬電路設(shè)計(jì)使HDTV體現(xiàn)出差異性
隨著高清電視(HDTV)顯示器技術(shù)的成熟,模擬視頻和音頻處理的質(zhì)量將最終使電視機(jī)之間產(chǎn)生差異性。HDTV中的數(shù)字處理(包括圖像擴(kuò)縮、
發(fā)表于 10-29 15:54
?845次閱讀
雙目視覺傳感器的現(xiàn)場標(biāo)定技術(shù)
本文以遺視投影變換為依據(jù),針對多視覺傳感器檢測系統(tǒng)中的雙目視覺傳感器,建立了雙目視覺傳感器測量空間三維坐標(biāo)的模型.事先確定攝像機(jī)的部分不易變化的參數(shù),其它參數(shù)在攝
發(fā)表于 03-02 16:02
?15次下載

一種基于圖像處理的雙目視覺校準(zhǔn)方法
雙目視覺是利用機(jī)器視覺進(jìn)行障礙物檢測的研究熱點(diǎn)。針對雙目視頻不同步,導(dǎo)致立體匹配不精準(zhǔn)的問題,提出了一種基于圖像處理的雙目校準(zhǔn)算法。算法首先根據(jù)道路的先驗(yàn)特征模型,建立
發(fā)表于 12-18 16:26
?34次下載
電流法的測試結(jié)果差異性影響分析
原文標(biāo)題:【賽盛技術(shù)案例分享】測試布置與分布參數(shù)對輻射發(fā)射及電流法的測試結(jié)果差異性影響分析 文章出處:【微信公眾號:深圳市賽盛技術(shù)有限公司】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。 責(zé)任編輯:haq

雙目視覺簡介及算法一般流程
1.1. 雙目視覺簡介 雙目視覺廣泛應(yīng)用在機(jī)器人導(dǎo)航,精密工業(yè)測量、物體識別、虛擬現(xiàn)實(shí)、場景重建,勘測領(lǐng)域。 什么是雙目視覺? 雙目視覺是模擬人類視
雙目立體視覺是什么?單目視覺與雙目立體視覺的區(qū)別?
雙目更多的是基于物理測量,而單目視覺則是基于邏輯推理,通過大量的數(shù)據(jù)訓(xùn)練,先識別出目標(biāo),再根據(jù)目標(biāo)的大小和高度估算距離。因此,單目視覺的漏檢率高于雙目立體
發(fā)表于 08-17 09:40
?6288次閱讀

雙目視覺在智能駕駛領(lǐng)域的應(yīng)用
圍繞“雙目智駕應(yīng)用”,我們將推出系列文章深入解析雙目視覺如何跨越技術(shù)鴻溝,在中國智駕的沃土上生根發(fā)芽,探索其賦能未來出行的無限可能。



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論