 關于四旋翼無人機測試解決方案的分析和介紹
關于四旋翼無人機測試解決方案的分析和介紹

近幾年,多旋翼無人機在越來越多的領域得到了廣泛應用,如視頻拍攝、輸電線路勘測、安防監控等。多旋翼無人機也逐漸成為一個新的商業熱點,引起了專業人士、業余愛好者和高校師生等眾多群體的關注。而多旋翼無人機組件性能的測試是保證其設計過程中調試效率的關鍵。本文會對四旋翼無人機的幾個關鍵部分的測試進行實測介紹。
一、飛控測試
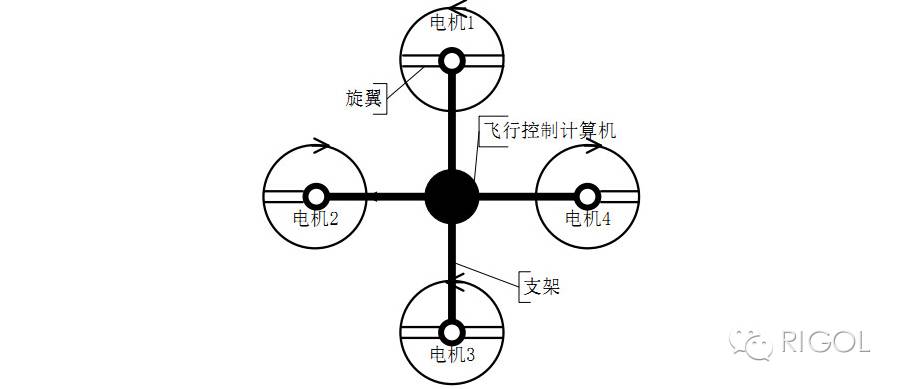
飛控板的作用是從接收機接收控制信號,轉換為4個螺旋槳的轉速信息后,通過飛控板上的陀螺儀對四軸飛行狀態進行快速調整,控制飛行器的平衡狀態。主要作用是給多旋翼飛機增穩。比如做懸停動作時,四軸無人機需要飛控不斷調整四軸電機轉速,使其平衡穩定保持懸停狀態。

飛控是四旋翼無人機的核心控制部分。因其較高的精度控制要求及多種總線通信信號的處理要求,使其無論在設計還是調試過程都占據了大量的時間。通常無人機組裝過程中對飛控的調試占據了90%以上的時間。因而對其使用測試儀器進行測試可以提高調試效率。
飛控測試包含以下測試內容
I2C總線
飛控板與各控制部分間通信都是采用總線。如定高超聲波模塊會定時將高度信息反饋給飛控,光流模塊也會定時將掃描到的地面位置信息反饋給飛控進而對比得到位置變化信息。這些通信采用的都是I2C總線,在調試過程可以通過示波器測試指令發送的正確性,返回數據的傳輸正確性及信號本身的傳輸質量,快速檢查通信質量。
I2C(Inter-Integrated Circuit)總線是微電子通信控制領域廣泛采用的一種總線標準。通過串行數據(SDA)線和串行時鐘(SCL)線在連接到總線的器件間傳遞信息。支持7位和10位尋址模式。
I2C總線有三種數據傳輸速度:標準的是100Kbps,快速模式為400Kbps,高速模式為3.4Mbps。發送到SDA 線上的每個字節必須為8 位,每次傳輸可以發送的字節數量不受限制。每個字節后必須跟一個響應位。首先傳輸的是數據的最高位(MSB)。
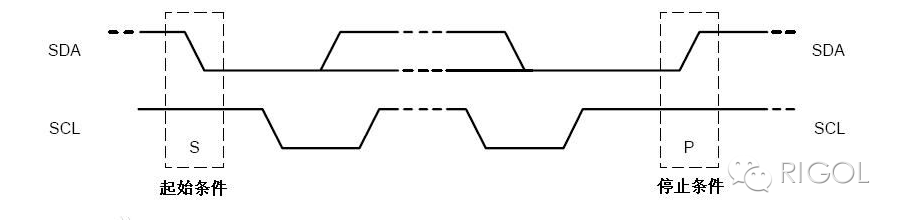
I2C的包起始信息- SCL為高時,SDA發生從高到低的翻轉
I2C的停止狀態– SCL為高時,SDA發生從低到高的翻轉
第9個比特是Master 發出的ACK(響應),要求傳輸中主機接收器必須通過在從機發出的最后一個字節時產生一個響應,向從機發送器通知數據結束。
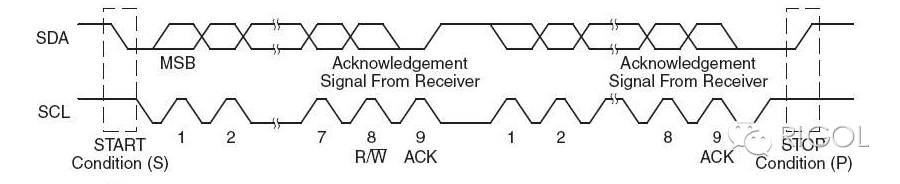
7-bit I2C總線禎結構
通過示波器可對I2C總線信號進行觀測并解碼查看返回高度信息。
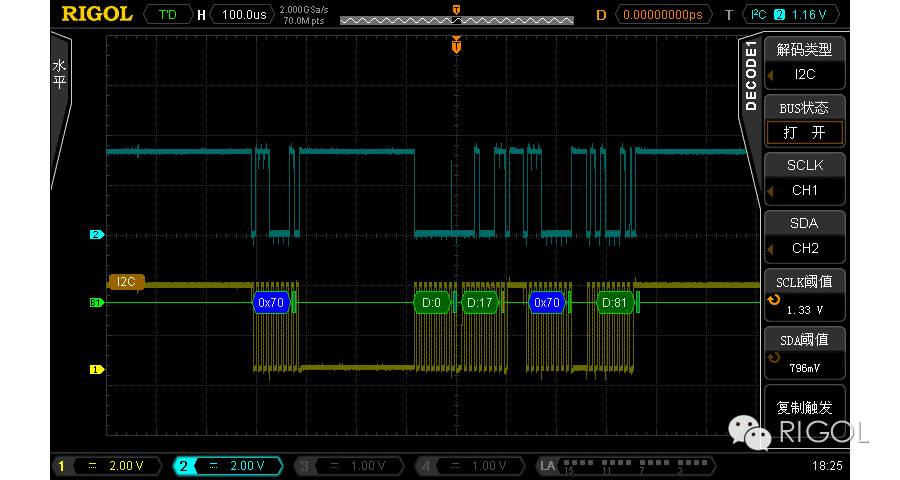
超聲波定位信息通信解碼
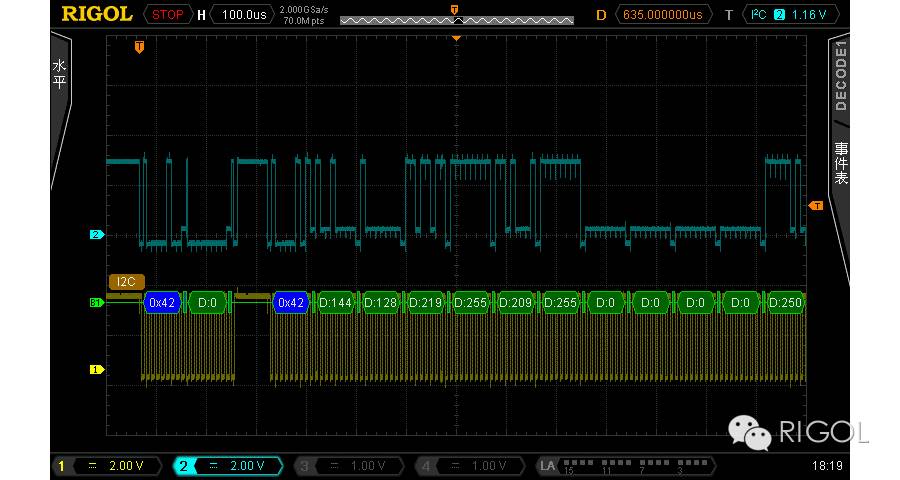
光流定位信息通信解碼
RS232總線
其他通信部分還會采用串口通信。如定高超聲波控制板與超聲波模塊間采用RS232進行通信。
RS232是異步傳輸標準接口,是目前最常用的一種串行通訊接口。規定的數據傳輸速率為每秒50,75,100,150,300,600,1200,2400,4800,9600,19200波特。通常以9個引腳(DB-9) 或是25個引腳 (DB-25) 的型態出現。工業控制的RS-232口一般只使用RXD、TXD、GND三條線。其結構如下:
–1個起始比特
–每字符7或8數據比特
–任意奇偶比特
–1或2個截至比特
–與其它串行總線不同(采用負邏輯)高電平為邏輯”0”,低電平為邏輯”1”

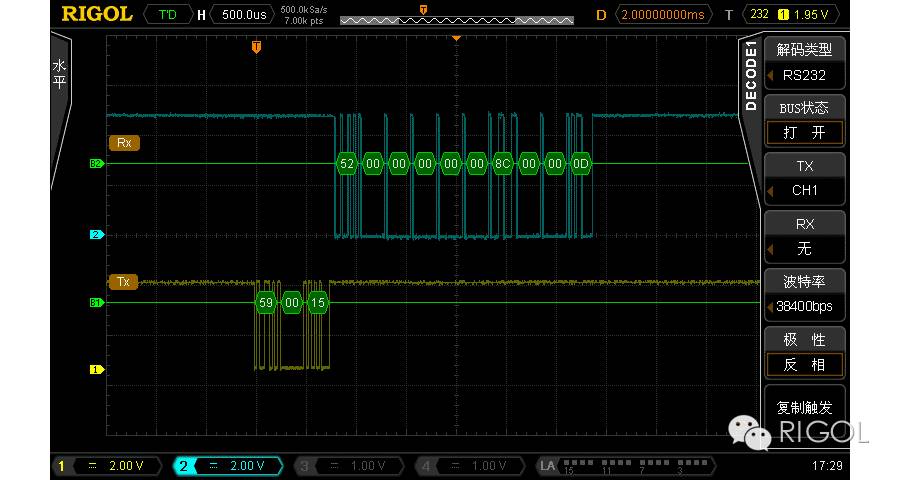
通過示波器可測試超聲定高模塊與控制電路間的RS232通信質量。控制電路會定時給超聲定高模塊發送讀數命令,之后各個超聲定高模塊會將各自當前高度值傳回給控制電路分析。所以可以從示波器解碼出來的RS232 TX和RX信息看出之間的觸發關系及對應的高度信息是否正確。
S-bus總線
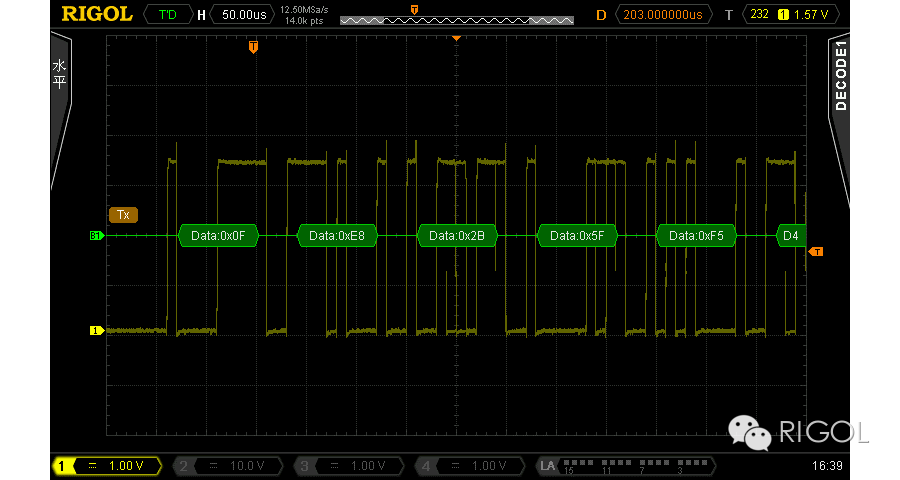
S-BUS總線為futaba使用的串行通信協議。實際上為串口通信。主要用在接收機接收遙控器控制信號后與飛控間通信。串口配置為波特率100kbps,8位數據,偶校驗(even),2位停止位,無流控。幀間隔為14ms (analog mode) 或 7ms (highspeed mode) 。每幀25個字節,順序如下

起始字節startbyte = 11110000b (0xF0),但實際上用STM32收到的是0x0F。中間22個字節就是16個通道的數據。data1為ch1的低8位,data2的低3位為ch1的高三位,data2的高5位是ch2的低5位,data3的低6位是ch2的高6位,以此類推。
data 1-22= [ch1, 11bit][ch2, 11bit] .... [ch16, 11bit] (ch# = 0 bis 2047)
通過示波器的解碼功能,可定位通道控制信息。
數傳通信
四旋翼無人機會實時將無人機的飛行狀態參數通過無線信號發送給APP控制端。此外一些攜帶攝像機或照相機的無人機也會通過無線信號進行圖傳。所以可通過頻譜分析儀測試無線傳輸信號的頻率范圍及功率大小。通過在頻譜分析儀接收端連接頻率匹配的天線,在數傳無線信號工作時進行監測,通過調節無人機的距離可測試接收功率與距離的關系。

二、遙控器
遙控器測試包含以下三個方面:
無線頻率
占用帶寬
發射功率
遙控器信號質量的好壞直接決定著對四旋翼無人機的飛行操控性。所以在設計和問題排查階段對遙控器發出的無線信號頻率穩定度,頻率偏差,占用帶寬,通道功率等進行標測,可確保遙控信號的質量和問題的定位。
此部分可以通過頻譜分析儀配置頻率匹配的天線進行測試。
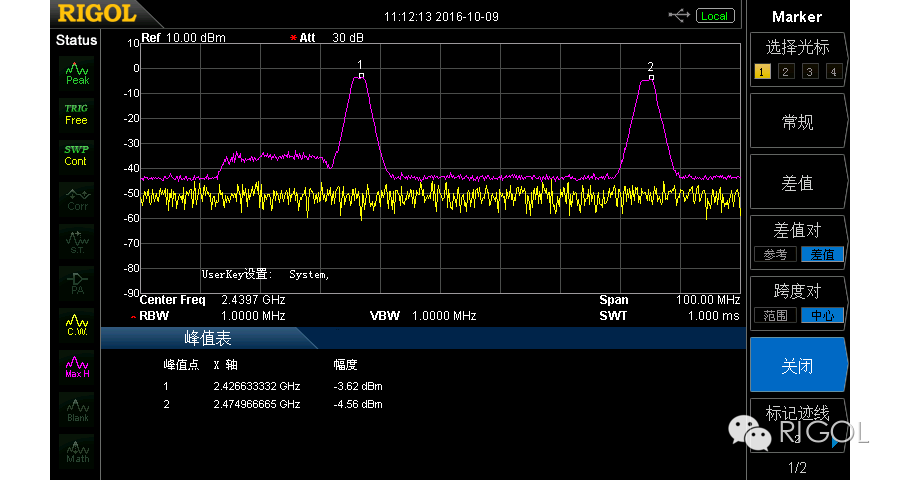
遙控信號占用帶寬的測試用來確認不同信道間是否會產生干擾和竄擾。信道功率用來確認發射功耗情況。
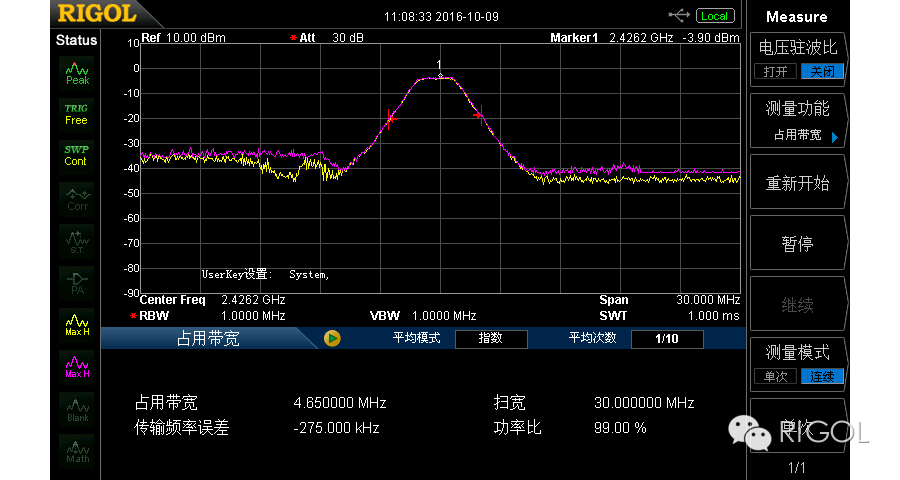
遙控信號占用帶寬測試
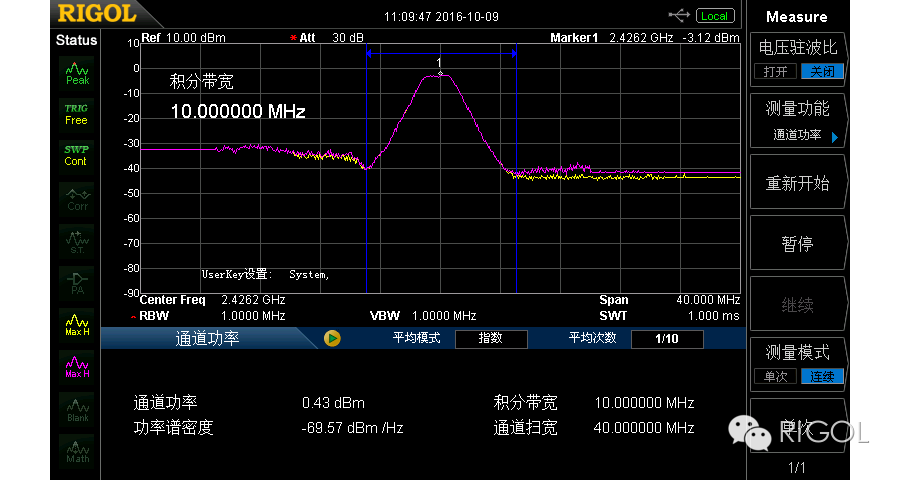
遙控信號通道功率測試
三、電機測試
電機測試主要包含以下方面:
PWM調速
穩定性
多旋翼無人機多個電機的轉速是否均勻,穩定決定著飛行狀態的穩定性。無刷直流電機由于啟動轉矩大,調速范圍廣,體積小,噪聲小等多種優點,使其成為多旋翼無人機的首選發動機。
電機的調速是通過控制電路控制開關管的導通時間決定的。多旋翼無人機的調速一般是采用調節三相全橋電路的開關管的導通信號占空比來實現的。其控制信號有PWM, PPM, PCM。
可以通過函數信號發生器產生占空比與速度可調的PWM波形,測試電機可調范圍及轉速穩定性。

-
控制電路
+關注
關注
83文章
1751瀏覽量
138637 -
遙控器
+關注
關注
18文章
877瀏覽量
71874 -
無人機
+關注
關注
236文章
11300瀏覽量
195714
發布評論請先 登錄

無人機力學可靠性試驗的核心價值與測試維度

光伏電站無人機巡檢系統構建方案
請問多旋翼無人機單個電機故障怎么排查問題?
無人機智能巡檢系統的技術特點與應用優勢
無人機智能巡檢系統的技術特點與應用實踐
在無人機測試領域中,自動化測試平臺ATECLOUD有哪些方面的應用?
無人機智能巡檢系統:現代化運維的空中解決方案
翼輝信息DUP產品如何助力無人機完成智能化飛行

科普|無人機反制槍介紹




 工商網監
工商網監
評論