") 關(guān)于人與機器溝通的語言--MATLAB的介紹分析
關(guān)于人與機器溝通的語言--MATLAB的介紹分析

RoboCup是國際上最大型、級別最高、最受國際認可的機器人大賽。每年有來自世界各地的200多個團隊參加,大會的目標是讓機器人在2050年擊敗人類世界杯冠軍。MathWorks作為全球贊助商之一,為所有參賽團隊免費提供正版軟件授權(quán)以及技術(shù)支持,幫他們解決難題,實現(xiàn)設(shè)計目標。
程鄴博士介紹了MathWorks公司產(chǎn)品在人工智能、機器人領(lǐng)域的應(yīng)用,以及公司的理念之一:讓更多的人掌握與機器交流的通用「語言」,讓更多非專業(yè)的人們能夠享受技術(shù)帶來的樂趣和益處,從而提升自己的教育、工作和生活。
就像人類說人類語言,計算機說機器語言,MathWorks的軟件相當于是創(chuàng)造了一種更接近人類語言的機器語言,讓人類與機器進行更好的交互。這可以理解成翻譯,我們在人類語言和機器語言之間進行翻譯,在高級機器語言和低級機器語言之間進行翻譯。
最近有一種趨勢,叫做計算語言素養(yǎng),就好像是傳統(tǒng)的識字、文學(xué)語言素養(yǎng),學(xué)習(xí)的卻是計算機語言。人人學(xué)習(xí)計算機語言,并不是說人人都要成為軟件工程師,而是要懂得現(xiàn)今的技術(shù)社會是怎樣運作的,培養(yǎng)基本的邏輯思維。
如今人手都持有多個智能電子產(chǎn)品,Internet of Things(IoT)、Smart Things等滲入于普通人生活的各個方面,能夠?qū)@些物品最基本的運作方式有些了解,甚至能和機器進行更好的交流,在逐漸變?yōu)橐环N素養(yǎng)。連前紐約市長、彭博集團總裁Michael Bloomberg都將學(xué)習(xí)編程作為新年志愿。一個億萬富翁為什么要學(xué)會編程呢?他真的覺得這件事情很重要,讓他有一種新的視角來理解世界。
MathWorks工具被廣泛應(yīng)用于教育業(yè)以及工業(yè)界,它的容易上手并且功能強大的特點也同時被很多業(yè)余愛好者和創(chuàng)客們接受。他們把自己的想象力和創(chuàng)造力用MATLAB、Simulink和其它工具箱很快的實現(xiàn)起來。
有人做了會自動解魔方的機器人、智能手環(huán)、心率監(jiān)測儀。有人自制家庭控溫系統(tǒng),行動監(jiān)測器、天氣探測器,聲控?zé)簟?chuàng)客們之所以能快速將自己的想象現(xiàn)實化,因為MATLAB和Simulink提供很多與低成本硬件(比如Arduino,Raspberry Pi,BeagleBoard等)的連接支持,并且有強大的圖像處理、數(shù)據(jù)采集、信號處理、控制等工具箱。幾行代碼、幾個模塊,不用是專業(yè)的工程師或者程序員,大眾也可以享受的MATLAB的應(yīng)用和樂趣。
MathWorks和人工智能與機器人
在給機器人編程時有一些非常復(fù)雜的數(shù)學(xué)模型,開發(fā)者可以選擇用比較低級的語言一點點寫,但是這會花很多時間。而MATLAB的平臺上已經(jīng)提供很多工具箱和自帶算法,一行MATLAB函數(shù)可以媲美幾十行C代碼。自動代碼生成大大縮短研發(fā)時間、并減少了手動代碼的出錯率。
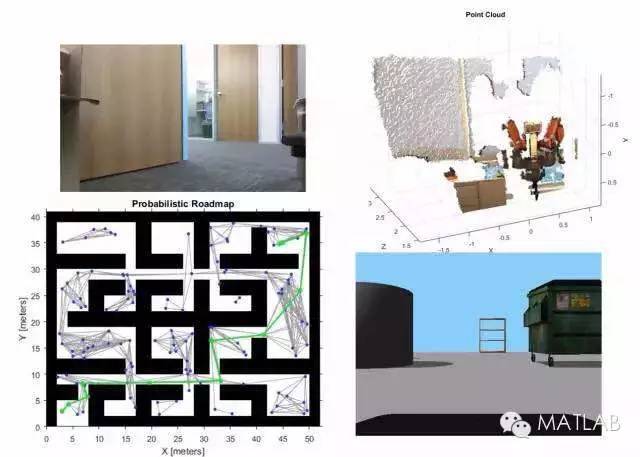
MathWorks也對機器人領(lǐng)域的關(guān)注和發(fā)展不僅限于機器人世界杯。 2015年,MathWorks推出全新工具包——Robotics System Toolbox,對于仿真機和硬件機器人提供直接的接口,還包含地圖、路徑規(guī)劃、圖像識別、自動控制等多種算法,為機器人領(lǐng)域的研發(fā)提供了軟件平臺。
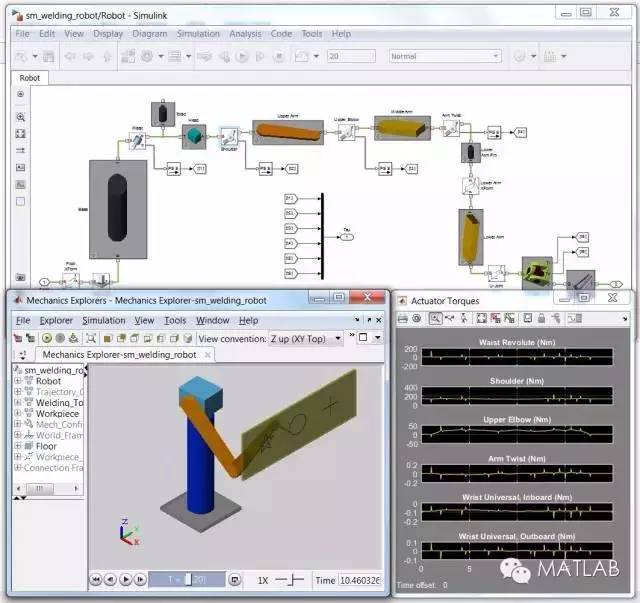
以一個工業(yè)焊接的機械臂為例:
它是讓焊接槍沿著一定軌跡運動,這其實是一個相當復(fù)雜的動力學(xué)及控制問題。因此,要想讓手臂末端指向空間一點或者沿一軌跡運動,需要列出并解決很多很復(fù)雜的數(shù)學(xué)公式,每個關(guān)節(jié)的運動軌跡、速度、以及促使運動需要的力和力矩等都是要計算的未知量。沒有計算機的幫助,靠手算是基本不可能的。
MATLAB和Simulink是高級的計算和建模工具,可以大大節(jié)省設(shè)計、仿真、和跟硬件結(jié)合的時間。在使用這些工具時,所有的部件、關(guān)節(jié)和約束等都是模塊化的。用戶可以直接選擇一個SimMechanics工具箱自帶的模塊,比如定軸轉(zhuǎn)動模塊,設(shè)好其約束,機器人手臂的肩膀關(guān)節(jié)就做成了。用同樣的方式很快便能組成整個機器人手臂的模型,并且模擬其運動,實時計算各關(guān)節(jié)需要的力矩。
如果靠人自己推倒公式,或者用C語言來從零開發(fā),工作量將成幾何倍增加,使用MATLAB和 Simulink進行建模和仿真的方式則大大降低了研發(fā)成本和時間,這就是為什么工業(yè)界會采用這種標準流程。
人工智能方面,以人臉跟蹤為例。程序首先需要的就是人臉識別,在MATLAB里因為后臺嵌入了很多數(shù)據(jù)庫,我們只需輸入命令——識別一雙眼睛,系統(tǒng)就可以找到眼睛。我們并不是人臉識別專家,但是用這一句簡單的MATLAB語言就可以實現(xiàn)這個功能。
MathWorks關(guān)注教育、關(guān)注工業(yè)、關(guān)注金融等各行各業(yè)的背后,是對人類技術(shù)和創(chuàng)新的不斷追求,是對于人類與機器溝通的向往。
-
機器人
+關(guān)注
關(guān)注
213文章
31079瀏覽量
222259 -
動力學(xué)
+關(guān)注
關(guān)注
0文章
108瀏覽量
17554 -
機器語言
+關(guān)注
關(guān)注
0文章
36瀏覽量
11043
發(fā)布評論請先 登錄
小鵬人形機器人IRON背后的設(shè)計細節(jié)
如何使用機器人分析儀EtherCAT-Analyzer抓取主從站數(shù)據(jù)?

小蘿卜機器人的故事
時空壺W4Pro:商務(wù)跨語言場景的高效溝通解決方案

關(guān)于機器人以及人形機器人的在認知




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論