") waymo 無人車的顏值視野操控性能適應(yīng)性是不是擁有了完美的硬件呢?
waymo 無人車的顏值視野操控性能適應(yīng)性是不是擁有了完美的硬件呢?

▌什么是硬件?
請允許我拿西部世界[1]的片頭來舉例,我們造好人的骨骼,肌肉以及神經(jīng),最后再給他注入思想,他就變成了一個完整的人。
硬件可以理解為人的骨骼,肌肉以及更復(fù)雜的器官。我們需要賦予硬件復(fù)雜多樣的功能以及無與倫比的適應(yīng)性。
那么我們需要無人車具備哪些功能并且適應(yīng)復(fù)雜多變的環(huán)境呢?
▌顏值
分享老師首先強調(diào)的第一點就是顏值,顏值即正義。曾經(jīng)有段時間我的 ID 就是顏值即正義,特別是前2年韓劇流行時這句話特別火,直白點說就是長得好看的做啥都對,即使做錯了,那也是你的錯。我們先看下 waymo 的無人車。
一開始我也很排斥無人車上面加裝的鋼骨架和傳感器,也許是接觸無人車久了,現(xiàn)在回過頭來再看 waymo 無人車的顏值一點也不低,我甚至覺得非常酷。也許還有漫長的路要走,使人們能接受這種審美。同時我們也需要不斷改善無人車的外觀,人們不會為丑的東西買單,可以看到 waymo 無人車的外觀也在不斷改善。
我們再回過頭去看下初代的無人車,下圖是DARPA 挑戰(zhàn)賽上奪冠的無人車 "Stanley",真是充滿了前蘇聯(lián)式的暴力美學(xué),酷似高達(dá)。
但是有什么車不那么在乎顏值呢?就是卡車,因為不是自己所有,主要是考慮功能,誰也不會在乎廚師的顏值高低,只是在乎菜做的好不好吃。所以卡車可以相對任意的架設(shè)設(shè)備,而可以較少的考慮顏值。
我們再看下應(yīng)該如何設(shè)計無人車頂?shù)耐鈿ぃ拔乙恢币詾檐嚿系臍ぷ雍蛡鞲衅魇且粋€整體,只需要買一個殼子,之后就可以直接安裝到車上了。沒想到實際上是把原來的架子用殼子遮擋起來了。為什么我希望能夠模塊化傳感器模組呢,很顯而易見的場景就是采集地圖,如果是在車上安裝架子,那么需要先改裝車,安裝傳感器,最后再把車開過去,假如你在深圳,客戶在北京,車開過去的成本太大了,但是如果是一個模組,可以把模塊快遞過去,安裝到車上,對面接一個電腦,通過簡單的校正就可以工作了,相對成本低很多。
▌視野
另一個很重要的方面是視野范圍,這也是一直強調(diào)的。看的更廣和看的更遠(yuǎn)。
1. 如何做到全視野
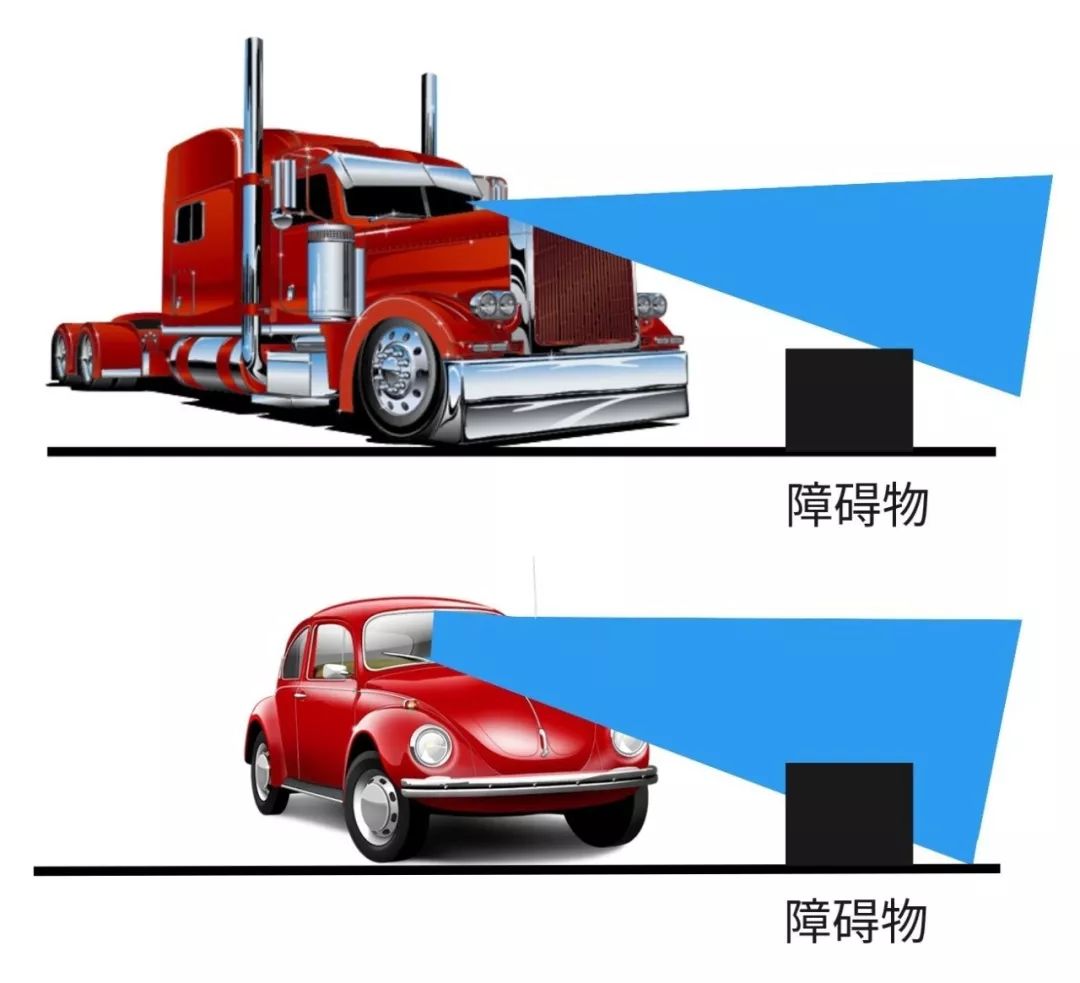
如果可以,我們需要 360° 的視野范圍,拿卡車和小汽車舉例子,可以看到卡車視角的盲區(qū)是很大的,給我映像很深的是看一個視頻中的交通事故展示,卡車司機停車后,貼近車頭有人通過,而司機在視野盲區(qū)看不到行人導(dǎo)致車禍。小汽車和卡車的視野比較:
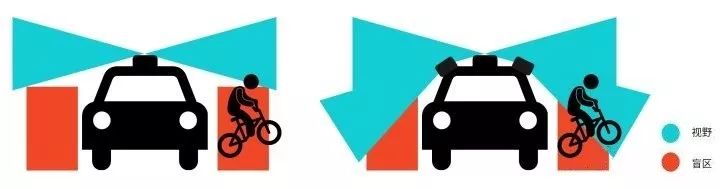
除了汽車帶來的差異以外,不同的場景下也會導(dǎo)致視野的盲區(qū),增加多個傳感器可以解決視野盲區(qū)問題,下圖中針對視野的盲區(qū),在左右分別增加了2個激光雷達(dá),擴大視野范圍。
另外調(diào)整傳感器的位置也影響到視野的范圍,下圖中在拐角處,特別是一些盤山公路,傳感器的位置在車的中部和前部展現(xiàn)的視野范圍也不一樣。

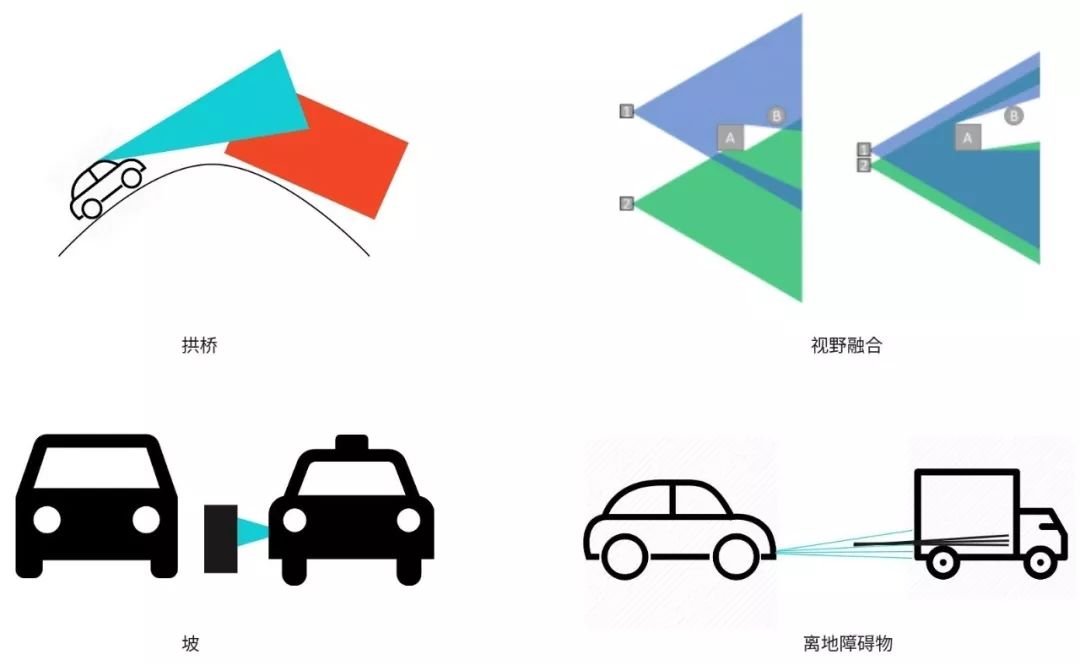
除了這些考驗以外,還有其他難以解決的問題,遇到拱橋的時候即使在車前面有傳感器,由于車的俯仰角度,也很難發(fā)現(xiàn)障礙物;傳感器的位置同時也可能帶來視野融合的問題,比如激光雷達(dá)看到了障礙物B而攝像頭沒有看到,融合的時候以哪個為準(zhǔn);由于毫米波雷達(dá)的垂直視野很窄,由坡導(dǎo)致的遮擋問題;另外的情況是卡車拖著鋼筋,或者樹木,由于很稀疏,靠雷達(dá)很難確認(rèn)這類障礙物。詳細(xì)的可以參考[2]:
我原本的一個想法是開發(fā)一款工具來識別汽車周圍的盲區(qū),在軟件中設(shè)置好傳感器的位置之后,可以查看盲區(qū)是多大,從而幫助硬件工程師選擇傳感器和確定傳感器的位置。
2. 如何做到遠(yuǎn)距離視野
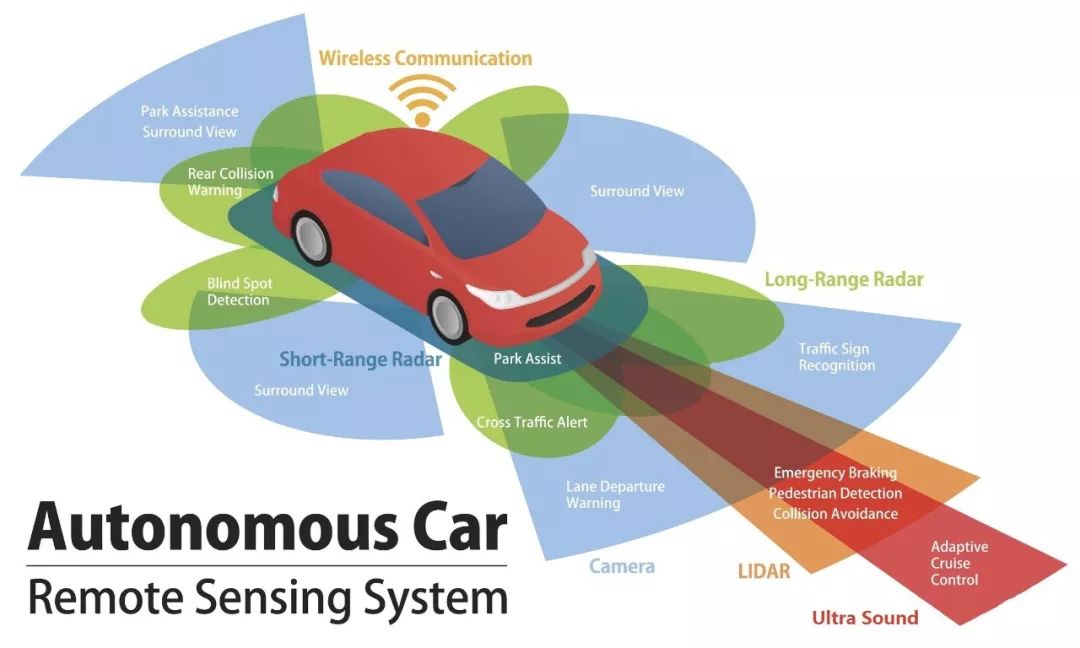
看的遠(yuǎn)的好處是當(dāng)車在高速行駛的時候,可以更快的發(fā)現(xiàn)潛在的危險。激光雷達(dá)遠(yuǎn)距離的點很稀疏,目前最遠(yuǎn)的范圍也就是100-150米左右,攝像頭和毫米波雷達(dá)的范圍更遠(yuǎn),能檢測到物體的速度也更高。我們通過下面這張圖來說明視野范圍:
3. 天氣對視野的影響
天氣對視野的影響是雙方面的,一是會影響視野可見,二是影響看到的視野遠(yuǎn)近,下面我們來看下天氣對不同的傳感器有哪些影響:
霧霾- 霧霾對激光雷達(dá)的影響最大,因為激光的波長和霧霾的顆粒大小差不多,穿透不了霧霾,同時攝像頭在霧霾的時候也會影響視野范圍,而毫米波的波長較長,可以繞過霧霾顆粒,受到的影響較小。
下雨- 下雨對攝像頭的影響比較大,一個可見的原因就是鏡頭會模糊,如果雨很大,只能依賴車內(nèi)的攝像頭。
光照- 光照對攝像頭的影響也很大,當(dāng)強光照射(對面遠(yuǎn)光燈直射),光線很暗(夜晚)或者光照突然變化(隧道出口)的時候,會導(dǎo)致攝像頭失靈,一個好的辦法是可以對攝像頭做處理,來適應(yīng)不同的曝光率。由于激光雷達(dá)是主動發(fā)射光的設(shè)備,所以光照的變化對激光雷達(dá)影響不大。
下雪- 下雪對攝像頭,激光雷達(dá),毫米波雷達(dá)都有影響。
我們從功能上和適應(yīng)性上把各個傳感器的雷達(dá)圖畫出來,可以看到每個傳感器都有它的優(yōu)點和缺點,沒有完美的傳感器,我們只能通過傳感器融合來實現(xiàn)近似完美,參考[3]。

▌操控
我們到底需要什么樣的汽車底盤,還是直接跳過去生產(chǎn)下一代?
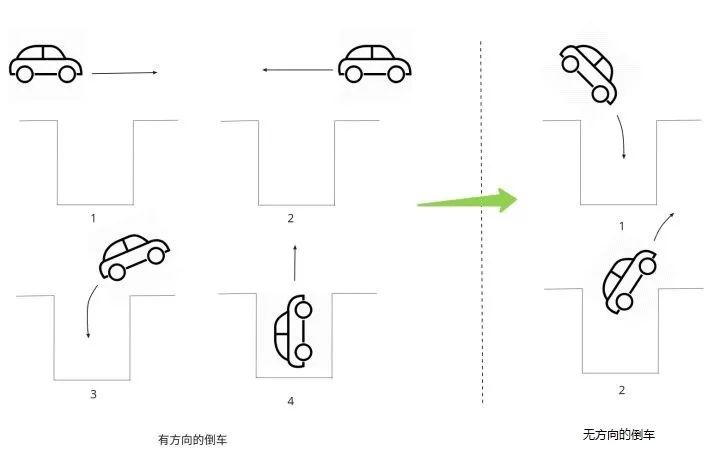
當(dāng)初我是被 Zoox 的設(shè)計驚艷到了,平時我也有這種想法,為什么每次停車的時候都需要倒車進(jìn)去,而不是直接開進(jìn)去呢,Zoox 就是為了解決這個問題而生的,因為 Zoox 認(rèn)為車有方向是人類的操控習(xí)慣,機器不存在這個問題,機器可以控制前輪,甚至后輪的方向,機器也不需要區(qū)別前進(jìn)和后退。因此 Zoox 生產(chǎn)的車是沒有方向的,甚至車?yán)锏淖灰矃^(qū)分不出前后,當(dāng)然為了安慰我作為人類脆弱的心靈,他們從道義上應(yīng)該提供一個標(biāo)志,來告訴我哪里是前,哪里是后。
從人類的角度我確實難以接受沒有方向的車,但是可以同時控制前輪和后輪的操控真是簡單了很多。
1. 倒車的時候方便了很多
如果是傳統(tǒng)的有方向的車,我們先要開過去,之后再倒車分為4步。而無方向的車就簡單了,直接開進(jìn)去,然后就直接開出來了,因為沒有方向,向前和向后對機器來說沒有任何區(qū)別。
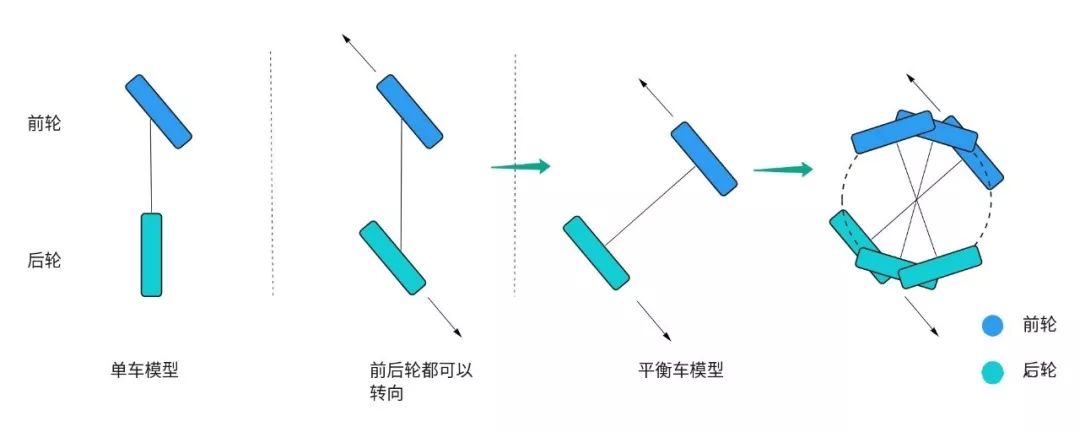
2. 可以原地轉(zhuǎn)彎
我們知道目前的汽車都是單車模型,也就是前輪轉(zhuǎn)向。而假設(shè)車的后輪也可以轉(zhuǎn)向,我們可以把模型抽象成2輪自平衡小車,這樣就可以在原地360°轉(zhuǎn)向。學(xué)車的時候最怕一會前進(jìn)檔,一會倒擋,很容易搞混往哪個方向打方向盤,而機器就不存在這樣的問題。這樣操控的好處是可以原地實現(xiàn)轉(zhuǎn)彎,以后再也不用擔(dān)心掉不過頭來的情況。
是不是感覺 Zoox 專門為機器而設(shè)計的下一代操控很酷炫,等到那一天來臨時,恐怕我已經(jīng)學(xué)不會開車了。
TODO:動態(tài)演示。本來想做個動態(tài)展示的,實在是沒時間了。
▌性能
1. 提升性能
我們一直希望車能夠性能強勁而功耗很低。半導(dǎo)體行業(yè)一直遵循著摩爾定律,即2年的性能翻一番。摩爾定律促進(jìn)了整個 PC 時代的發(fā)展,但是現(xiàn)在摩爾定律失效了,目前硅基的制程最多到 7nm,再往前進(jìn)一步已經(jīng)相當(dāng)困難了,因為距離近了會漏電,擊穿硅晶體,導(dǎo)致良品率太低。制程的降低首先是可以減少功耗,其次是提升性能,目前來看很長一段時間通用 CPU 會陷入停滯。
要提升性能,神經(jīng)網(wǎng)絡(luò)的芯片還有很大的進(jìn)步空間,比如 TPU,會大大降低深度學(xué)習(xí)的功耗,并且提升性能,這塊可能是未來的主戰(zhàn)場。另外一個比較好的方向是 FPGA 或者一些專用的芯片,把傳感器融合算法和一些底層算法融入硬件,一是可以提高性能,二是分工明確,促進(jìn)無人車系統(tǒng)的模塊化發(fā)展。
2. 功耗的影響
我們再看下功耗對無人車的影響,首先第一點是供電,影響車輛的續(xù)航。假設(shè)按照 2KW 估算,特斯拉的電池容量是 75kWh (千瓦時)那么使用的時長是37.5小時。這還僅僅是運算的開銷,還沒有算車本身的開銷,我想到了科幻電影里,由于能源緊張,智能操控體為了節(jié)省能源,而不得不進(jìn)入休眠模式。
功耗太強帶來的另外一個問題是散熱。目前有用到水冷散熱的,風(fēng)扇可能滿足不了太強的散熱需求。我記得很早以前水冷都是拿自來水冷卻的,過一段時間還需要加水,現(xiàn)在有水冷散熱片就不用了,原理就是把水放在銅管里,循環(huán)流動散熱,也不用加水了。加水有2個壞處,一是北方的冬天零下的時候如果是自來水會凍住,我們知道凍住之后水的體積會變大,會把發(fā)動機撐壞。二是我們知道水是會沸騰的,如果變?yōu)樗魵猓~管會爆炸。所以目前的水冷都是水中加入了防凍液和各種專門用途的防腐劑組成的混合物,防凍,沸點也會到達(dá)120度左右,也就很好的解決了上面的問題。
最后的問題是出風(fēng)口,和進(jìn)風(fēng)口,如果在后備箱,沒有出風(fēng)口和進(jìn)風(fēng)口,熱量也很難散發(fā)出去。
▌適應(yīng)性
良好的適應(yīng)性代表著我們能夠戰(zhàn)勝復(fù)雜多變的環(huán)境。我們先看下我們處在什么樣的環(huán)境下,然后再看我們面臨著哪些挑戰(zhàn)。如果有一天人類殖民火星了,我敢說,一定有人會把通用告上法庭,因為他們沒有備注這點:地球生產(chǎn)的車不適用于火星。先看下無人車后備箱的整個結(jié)構(gòu):
無人車的后備箱放著電源,網(wǎng)絡(luò)設(shè)備,運算單元以及各種數(shù)據(jù)線等,它們會面臨著這些挑戰(zhàn):
振動- 因為長期和電子設(shè)備接觸,這點我深有體會。比如機械硬盤最怕震動了,汽車經(jīng)常處于顛簸狀態(tài),當(dāng)初我們快遞的4塊硬盤都因為震動壞了;另外電路板也很怕震動,我們知道電路板的表面刷了一層絕緣膠,如果設(shè)計的不好,結(jié)構(gòu)件經(jīng)常摩擦電路板,會把絕緣層磨掉,電路會直接燒毀,這也是災(zāi)難性的。
溫度- 汽車在夏天的時候在室外暴曬溫度非常高,環(huán)境溫度可能就是40-50度,而這時候如果機箱還在產(chǎn)熱,那么溫度會更高。汽車要求的溫度范圍非常高,僅次于航天,要求是 -40°~120° 的溫度能夠工作,可以說目前無人車大部分的元器件還達(dá)不到要求。
濕度- 濕度太高會導(dǎo)致電源短路或者進(jìn)水。
鹽- 在海邊的城市,空氣中還有鹽,導(dǎo)致對汽車元器件的腐蝕性。
電磁- 大功率的計算單元會導(dǎo)致電磁輻射,而高速的總線也很怕電磁輻射。
這一塊才是無人車工業(yè)化必須克服的挑戰(zhàn),是無人車得以大量生產(chǎn)的保障,想要無人車的普及,必須要解決上面的問題。
▌總結(jié)
假如我們現(xiàn)在擁有了酷炫的外觀;廣闊的視野;完美的操控;強勁的性能和極低的功耗;還能夠適應(yīng)各種復(fù)雜多變的環(huán)境。那么造物主們,我們是不是擁有了完美的硬件呢?
-
電路板
+關(guān)注
關(guān)注
140文章
5317瀏覽量
108230 -
無人車
+關(guān)注
關(guān)注
1文章
319瀏覽量
37728
原文標(biāo)題:自動駕駛思考:硬件篇
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
機器人環(huán)境適應(yīng)性試驗怎么做?需要用到哪些設(shè)備和標(biāo)準(zhǔn)?

RK3588操控終端
吉時利靜電計在環(huán)境適應(yīng)性測試中的應(yīng)用

如何通過通信與交互穩(wěn)定性數(shù)據(jù)判斷裝置的環(huán)境適應(yīng)性?
如何通過現(xiàn)場觀察評估電能質(zhì)量在線監(jiān)測裝置的環(huán)境適應(yīng)性?
如何測試時間同步硬件的電源波動適應(yīng)性?

如何進(jìn)行時間同步硬件的環(huán)境適應(yīng)性測試?
無人機操控核心:智能飛行的技術(shù)引擎
傳感器選型與性能權(quán)衡:精度、穩(wěn)定性及環(huán)境適應(yīng)性原則
聚徽工業(yè)液晶屏的寬溫適應(yīng)性技術(shù)解析
SMA接口在汽車電子復(fù)雜環(huán)境下的適應(yīng)性剖析

頻率適應(yīng)性、抗干擾性大揭秘:BNC 型射頻連接頭的獨特優(yōu)勢
頻率適應(yīng)性、抗干擾性大揭秘:BNC 型射頻插座的獨特優(yōu)勢
M12 航空插座型號深度剖析:根據(jù)環(huán)境適應(yīng)性與耐用性選型
新型光伏氣象站在復(fù)雜地形條件下的適應(yīng)性與性能評估
- 設(shè)計技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測量儀表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無線
- 接口/總線/驅(qū)動
- 處理器/DSP
- EDA/IC設(shè)計
- 存儲技術(shù)
- 光電顯示
- EMC/EMI設(shè)計
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實
- 可穿戴設(shè)備
- 機器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專欄推薦
- 學(xué)院
- 設(shè)計資源
- 設(shè)計技術(shù)
- 電子百科
- 電子視頻
- 元器件知識
- 工具箱
- VIP會員
- 最新技術(shù)文章
- 產(chǎn)品地圖
- 品牌地圖
- 電子發(fā)燒友
- 關(guān)于我們
- 聯(lián)系我們
- 舉報投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動端
- 發(fā)燒友APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內(nèi)容合作
- 張迎輝:mikezhang@elecfans.com
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察

版權(quán)所有 ? 長沙勒克斯教育咨詢有限公司
湖南省長沙市開福區(qū)月湖街道匍園路20號聚恒科技園1棟2301-1房
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023036445號-105-1
工商網(wǎng)監(jiān)
湘ICP備2023036445號-105-1
評論