完善資料讓更多小伙伴認識你,還能領取20積分哦,立即完善>
電子發燒友網技術文庫為您提供最新技術文章,最實用的電子技術文章,是您了解電子技術動態的最佳平臺。
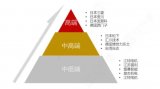
爬壁機器人可以根據其工作原理、設計和應用領域進行分類。以下是一些常見的爬壁機器人分類:1. 吸盤式爬壁機器人;2. 磁力式爬壁機器人;3. 輪式爬壁機器人。...
先進制造機器人研究所(ARM)的首席技術官Chuck Brandt指出,讓機器人專家在房間里尖叫著跑出來的最快方法之一,是讓工業機器人處理布料,這是一個出了名的疑難問題。...
機器人的組成部分與人類極為類似。一個典型的機器人有一套可移動的身體結構、一部類似于馬達的裝置、一套傳感系統、一個電源和一個用來控制所有這些要素的計算機“大腦”。從本質上講,機器人是由人類制造的“動物”,它們是模仿人類和動物行為的機器。...
1) 打開 Cell Browser 2) 點擊 Fixtures 3) 右鍵點擊 Generic Simple Conveyor...

特斯拉的人形機器人中共有28個運動關節,包括三種旋轉執行器和三種線性執行器。分布于肩髖等需要大角度旋轉關節所采用的主要是旋轉執行器,而線性執行器主要分布于膝肘等擺動角度不大的單自由度關節,以及腕踝兩個雙自由度但是體積緊湊的關節。...

“伺服”表示電機在閉環控制系統中運行,該系統使用來自編碼器或旋轉變壓器(通常集成到電機或安裝在電機上)的反饋來比較電機的實際位置、速度或扭矩與指令的差距,進而實現精確運動,屬于機器人核心技術之一。...
SLAM至今已歷經三十多年的研究,這里給出經典視覺SLAM框架,這個框架本身及其包含的算法已經基本定型,并且已經在許多視覺程序庫和機器人程序庫中提供。...

三點法操作步驟: 記錄接近點1 a.移動光標到接近點1(Approachpoint1); b.把示教坐標切換成全局坐標(WORLD)后移動機器人,使工具尖端接觸到基準點; c.按【SHIFT】+F5【RECORD】(位置記錄)記錄...

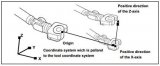
六點示教法包括六點(XY)示教法、和六點(XZ)示教法。 六點(XZ)示教法中,取一個方向原點、一個與所需工具坐標系平行的X軸方向點、一個XZ平面上的點。此時,通過笛卡爾點動或工具點動進行示教,以使工具的傾斜保持不變。...
如果在機器人夾持器上安裝了帶有5/3通閥的手動夾持器,則在調用maKro342“夾持器打開/吸盤關閉”之后,必須在PSPS中設置“夾持組打開”的相關輸出。這樣可以確保手動張緊器保持其位置。相應的輸出必須在裝載位置復位。...

Llama 2是 Meta 發布了其最新的大型語言模型,Llama2 是基于 Transformer 的人工神經網絡,以一系列單詞作為輸入,遞歸地預測下一個單詞來生成文本。...

變位機協調運動是一種運動控制方法。使用協調運動,可以使得兩個運動組的運動速度相對恒定。結合變位機的協調功能,有利于持續回轉型焊縫(譬如“環形焊縫”)的示教編程和工藝實現,有利于復雜曲線焊縫(譬如“馬鞍形焊縫”)的示教編程和工藝實現。...

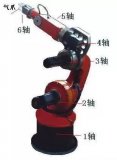
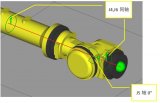
在調試機器人時,如果機器人處于下圖狀態(處于J4軸和J6軸同軸),會發生報警:MOTN-023或者MOTN-063,在此情況下,機器人只能在關節坐標系下移動。以下姿態即為奇異點位置。...
選擇和使用磁吸附爬壁機器人時,需要根據具體應用的需求和安全性要求來評估和確定其適用的載重能力。最好參考機器人制造商提供的技術規格和建議,以獲取準確的載重能力信息。...
常見的機器人視覺伺服中要實現像素坐標與實際坐標的轉換,首先就要進行標定,對于實現視覺伺服控制,這里的標定不僅包括攝像機標定,也包括機器人系統的手眼標定。...

工程師們一直在試圖搭建更智能、可靠的機器人,比如之前火爆全網、來自波士頓動力公司的機器狗Spot。它可以輕松上下樓梯、搬運重物、巡查街道,等等。...

關注我們的微信

下載發燒友APP

電子發燒友觀察

版權所有 ? 長沙勒克斯教育咨詢有限公司
湖南省長沙市開福區月湖街道匍園路20號聚恒科技園1棟2301-1房
電子發燒友 (電路圖) 湘公網安備43011202000918 工商網監
湘ICP備2023036445號-105-1
工商網監
湘ICP備2023036445號-105-1


