 電子發燒友App
電子發燒友App












 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
你好,
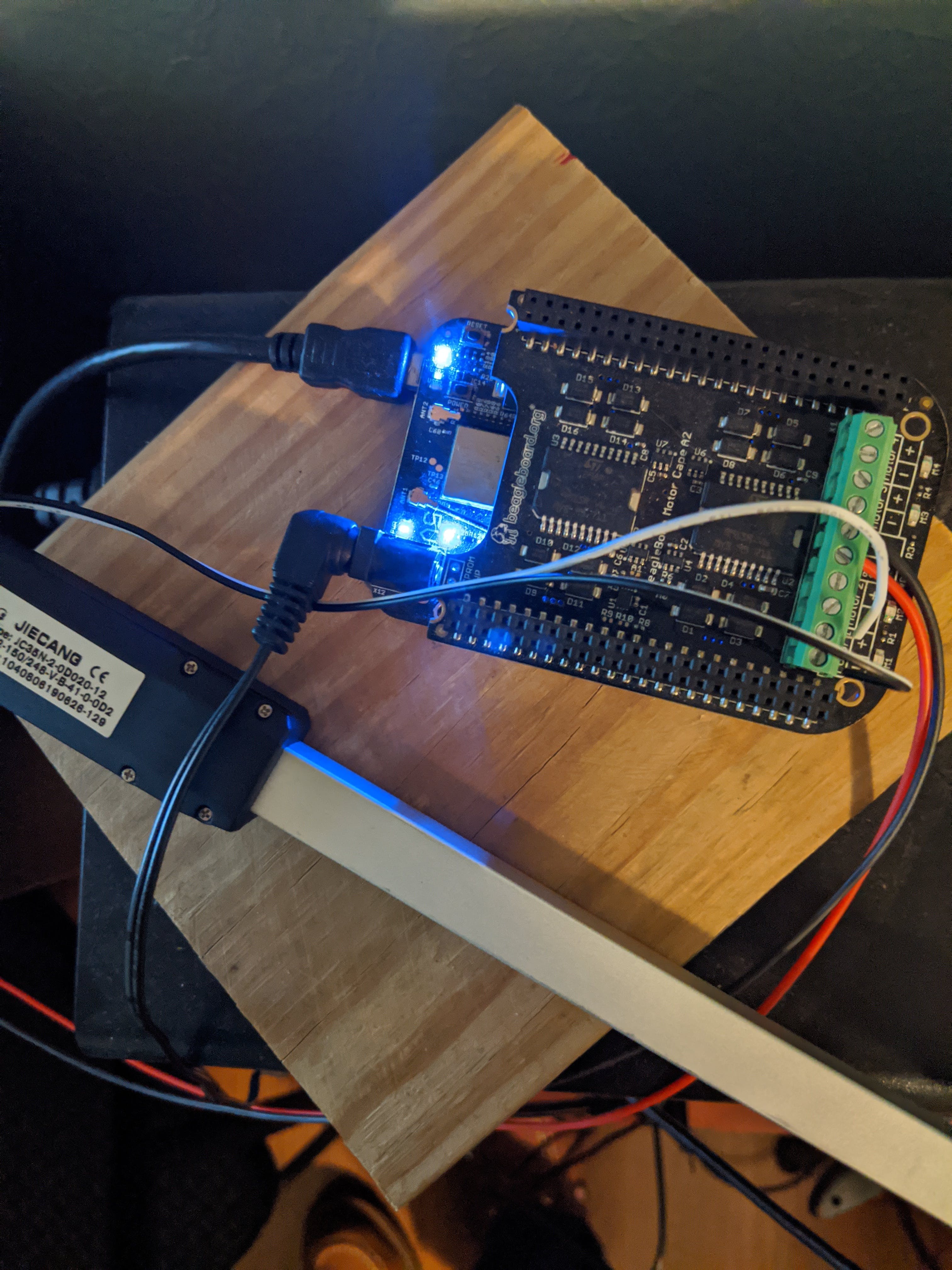
首先,準備一個 BBBW(BeagleBone Black Wireless)、一個 MotorCape 和一些線性致動器(這次比較適合)。享受它,您無需設置執行器即可看到這些操作。
...
我有另一種類型的線性致動器,它可以伸縮和縮回。它基本上是一種推/拉機構,而不是像兩輪或四輪機器人那樣的滾動運動。
...
但是……我的執行器上的外殼包含一些非常復雜的部件,這些部件使這個電機產生一個帶有外部鋁制外殼的伸縮運動。
...
所以,我們仍然需要源,附加 MotorCape,并附加其余組件,但首先!
我們將把我們的 BBBW 插入我們的開發桌面。這樣,當我們插入所有東西時,我們可以使用一些資源,例如執行器的電線,電池的電線,從我們的 BBBW 筒形插頭到墻上插座的筒形插頭,以及 Micro USB 到 USB。
好的...
所以,我們需要輸入一些來源:
from flask import Flask, render_template
import Adafruit_BBIO.GPIO as GPIO
import Adafruit_BBIO.PWM as PWM
class Motor:
def __init__(self, dir_pin, pwm_pin, pwm_freq):
self.dir_pin = dir_pin
self.pwm_pin = pwm_pin
self.value = 0
PWM.start(pwm_pin, 0, pwm_freq)
GPIO.setup(dir_pin, GPIO.OUT)
def set(self, value):
assert -100 <= value <= 100
if (value < 0) != (self.value < 0):
# changing direction
PWM.set_duty_cycle(self.pwm_pin, 0)
GPIO.output(self.dir_pin, value < 0)
PWM.set_duty_cycle(self.pwm_pin, abs(value))
self.value = value
motor1 = Motor(dir_pin="P8_18", pwm_pin="P9_16", pwm_freq=2000)
def updates(state=None):
if state == "E":
motor1.set(100) # expanding!
if state == "S":
motor1.set(0) # stopping!
if state == "R":
motor1.set(-75) # retracting!
template_data = {
"title" : state,
}
return render_template("Boot.html", **template_data)
if __name__ == "__main__":
app.run(host="0.0.0.0", port=5000, debug=False)
好的。所以,這是一個首發。不錯,咦?現在,我們可以開始、停止和收回我們正在做的事情。
好的!
...
如果您對這種伸縮式機械裝置感到厭煩,總有一種方法可以使用 GHI Electronics 的這款斗篷制造更多、更多三個。
因此,您總共可以擁有四個可擴展和可伸縮的線性執行器,風險自負。您可以在末端制作輪子,或者將它們作為您漂亮機器人的腿。誰知道你能做什么?
可以,然后呢。
現在,我們需要一個來自 Flask 微服務的服務器。創建一個名為 Blah 的目錄并 cd 進入該目錄。現在,創建另一個名為模板的目錄。在模板目錄中,使用此源并創建一個名為 BlahBlah.html 的 html 文件。
html>
<html lang="en">
<head>
<title>{{ status }}title>
<meta charset="utf-8">
<meta name="viewport" content="width=device-width, initial-scale=1">
<link rel="stylesheet" href="https://maxcdn.bootstrapcdn.com/bootstrap/3.3.7/css/bootstrap.min.css">
<script src="https://ajax.googleapis.com/ajax/libs/jquery/3.3.1/jquery.min.js">script>
<script src="https://maxcdn.bootstrapcdn.com/bootstrap/3.3.7/js/bootstrap.min.js">script>
head>
<body>
<div class="jumbotron text-center">
<h1>MotorCape and BBBW!h1>
<p>This is a quick example on making an actuator move!p>
div>
<div class="container">
<div class="row">
<div class="col-sm-4 text-center">
<h3>Agent Oneh3>
<p>More text and fun makings in life...p>
<p>Get ready to control some motors!p>
div>
<div class="col-sm-4 text-center">
<h3>Agent Twoh3>
<hr>
<a href="/E" id="on" class="button">EXTENDa>
<br><br>
<a href="/S" id="on" class="button">STOPa>
<br><br>
<a href="/R" id="on" class="button">RETRACTa>
div>
div>
div>
body>
html>
我從各種來源獲得了其中的一些來源,并結合,排除,隨著時間的推移,我已經忘記了確切的來源,但如果你抓住我,請添加任何你認為值得作為來源的東西。哦,我從 w3schools.com 獲得了一些代碼。
暫時不要給你的電路板加電。如果它打開是因為您將源代碼放在正確的目錄中,請使用 sudo shutdown -h now 關閉您的主板。請記住,在弄亂接線時不要給電路板加電。這對董事會和你都很危險。
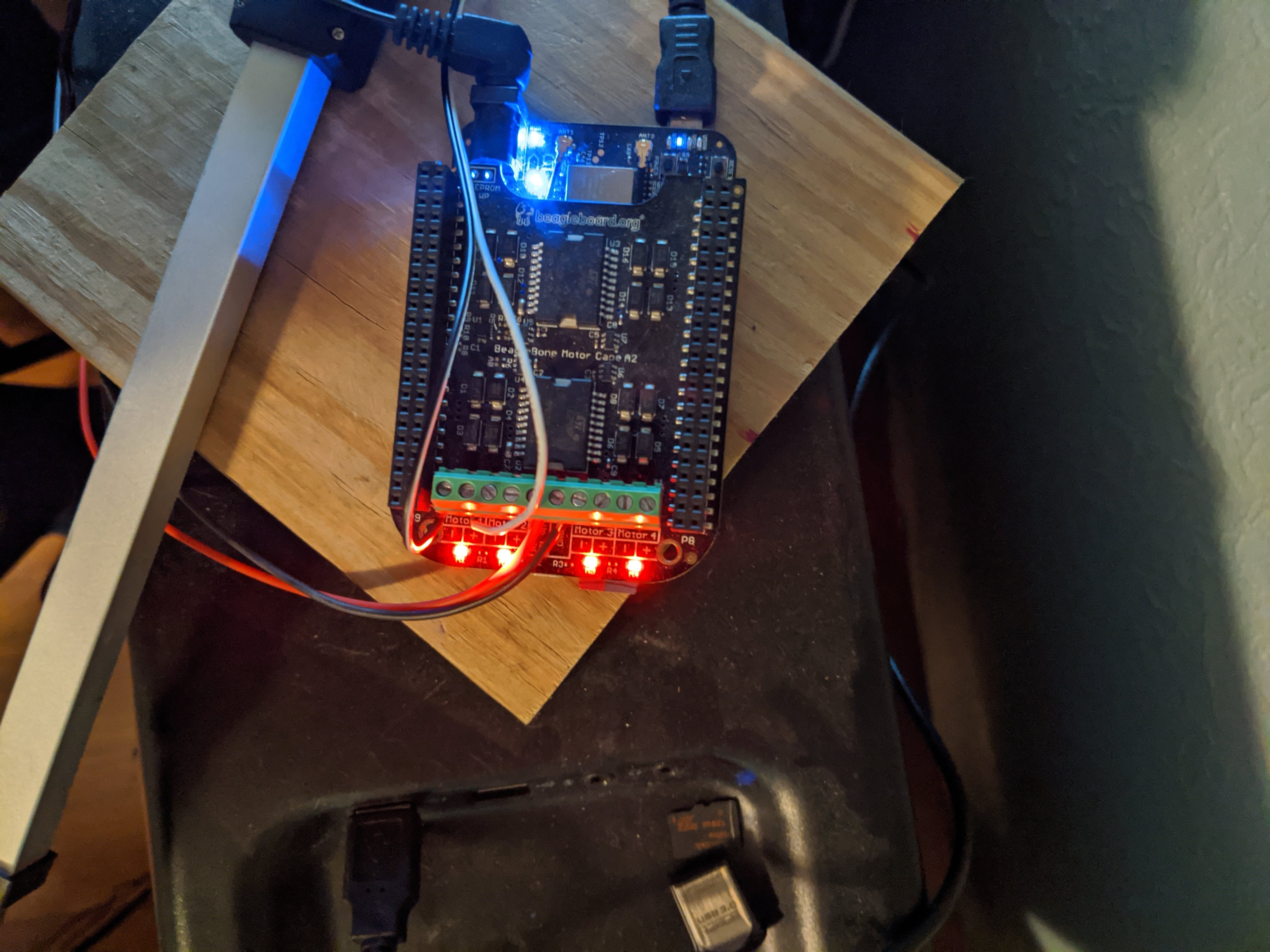
接下來,我們需要將接線添加到 MotorCape 中的螺絲端子。因此,如果已經完成了壓接,希望用于電池端子,請將紅線放在螺絲端子的正極端口中。然后,在 MotorCape 螺絲端子上添加 GND 電纜/電線。請記住,對于電池,極性很重要。
極性:兩極的相對方向;磁場或電場的方向。我從在線詞典中得到了這個定義。
首先,通過 Micro USB 轉 USB 將 BBBW 插入開發桌面,將桶形插孔插入墻上插座,然后先插入 NEGATIVE 快速斷開器,然后通過 12v 電池為 Cape 供電。現在,您可以使用帶有快速斷開功能的紅線將正電源施加到您的斗篷上。
...
現在,希望我們都還活著,動起來。如果沒有,請重新閱讀文章并首先確保安全。
...
如果您發現我不正確或需要進行一些更正,請與我聯系。
...
所以,一切都應該插入并工作。如果你登錄到你的董事會,BBBW,然后去你的目錄。您制作的,使用 python3 blah.py 運行您的源代碼。
這應該運行一個小程序,允許您打開瀏覽器 Chrome,訪問您主板的 IP 地址以及端口號 5000,并控制您的線性執行器。
賽斯
PS哦,如果你下來,這里有一些照片。我可以提供某種類型的信息。如果您需要我隨時解釋任何事情。
?
?
?
?
- 觸覺反饋執行器產品說明書
- 用Arduino控制小型線性執行器
- 基于BeagleBone Black的小獵犬車 1次下載
- 用Seeed Studio BeagleBone Green Wireless開發板解決物聯網應用開發面臨的挑戰
- BeagleBone Black的PCB板 0次下載
- BeagleBone Black eMMC 燒寫全記錄 ( 基于 AM335x SDK06)
- 無線WIFI OSD3358 beaglebone black 主板原理圖PCB手冊
- 怎么樣設計機器人的末端執行器 6次下載
- 如何在BeagleBone Black上啟動各種版本的Ubuntu 0次下載
- 基于BeagleBone_Black開發板的使用說明圖解 8次下載
- 具有執行器飽和與隨機非線性擾動的離散系統模型預測控制_石宇靜 0次下載
- BeagleBone Black快速入門教程工具和源代碼 26次下載
- 執行器的選擇
- 基于HART協議的智能執行器接口卡的開發
- 基于神經網絡的電動執行器狀態診斷
- 機電執行器概述和演變 1.9k次閱讀
- 多層壓電執行器的應用 2.4k次閱讀
- 使用DAC精確控制線性執行器 3k次閱讀
- 觸覺反饋設計中常用的執行器 3k次閱讀
- 如何為BeagleBone Black添加電容式觸控顯示模塊 4k次閱讀
- 如何使用Arduino控制大型線性執行器 3.2k次閱讀
- 操作BeagleBone Black的方法 4.8k次閱讀
- 氣動執行器的組成_氣動執行器選型 4.7k次閱讀
- 氣動執行器的常見故障和解決方法 8.2k次閱讀
- 執行器故障原因及檢修 1.1w次閱讀
- 執行器由什么組成_執行器的工作原理 1.3w次閱讀
- 執行器是什么_執行器的主要作用 1.9w次閱讀
- 微雪電子BB Black 卡片式電腦簡介 2.9k次閱讀
- 電熱執行器的作用 1.5w次閱讀
- 電熱執行器是什么_電熱執行器工作原理 2.1w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1新一代網絡可視化(NPB 2.0)
- 3.40 MB | 1次下載 | 免費
- 2冷柜-電氣控制系統講解
- 13.68 MB | 1次下載 | 10 積分
- 3MDD品牌三極管MMBT3906數據手冊
- 2.33 MB | 次下載 | 免費
- 4MDD品牌三極管S9012數據手冊
- 2.62 MB | 次下載 | 免費
- 5LAT1218 如何選擇和設置外部晶體適配 BlueNRG-X
- 0.60 MB | 次下載 | 3 積分
- 6LAT1216 Blue NRG-1/2 系列芯片 Flash 操作與 BLE 事件的互斥處理
- 0.89 MB | 次下載 | 3 積分
- 7收音環繞擴音機 AVR-1507手冊
- 2.50 MB | 次下載 | 免費
- 8MS1000TA 超聲波測量模擬前端芯片技術手冊
- 0.60 MB | 次下載 | 免費
本月
- 1愛華AIWA HS-J202維修手冊
- 3.34 MB | 37次下載 | 免費
- 2PC5502負載均流控制電路數據手冊
- 1.63 MB | 23次下載 | 免費
- 3NB-IoT芯片廠商的資料說明
- 0.31 MB | 22次下載 | 1 積分
- 4UWB653Pro USB口測距通信定位模塊規格書
- 838.47 KB | 5次下載 | 免費
- 5蘇泊爾DCL6907(即CHK-S007)單芯片電磁爐原理圖資料
- 0.04 MB | 4次下載 | 1 積分
- 6蘇泊爾DCL6909(即CHK-S009)單芯片電磁爐原理圖資料
- 0.08 MB | 2次下載 | 1 積分
- 7100W準諧振反激式恒流電源電路圖資料
- 0.09 MB | 2次下載 | 1 積分
- 8FS8025B USB的PD和OC快充協議電壓誘騙控制器IC技術手冊
- 1.81 MB | 1次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935137次下載 | 10 積分
- 2開源硬件-PMP21529.1-4 開關降壓/升壓雙向直流/直流轉換器 PCB layout 設計
- 1.48MB | 420064次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233089次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費下載
- 340992 | 191439次下載 | 10 積分
- 5十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183353次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81602次下載 | 10 積分
- 7Keil工具MDK-Arm免費下載
- 0.02 MB | 73822次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65991次下載 | 10 積分



 工商網監
工商網監
評論