 電子發燒友App
電子發燒友App












 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
大家好!我希望你已經喜歡我之前的教程“如何制作人形機器人”。這是一個內容豐富的教程,教你任何步進電機控制的基礎知識,我已經發布了一個關于控制直流電機的速度和方向的,今天我們將開始使用步進電機,希望在下一個教程中我將解釋如何玩一些伺服電機。
在撰寫這篇文章的過程中,我們試圖確保本教程將成為您的最佳指南,以便您享受學習步進電機控制的基礎知識,因為這對于那些想要開始電子和機器人學習的人來說非常重要。所以我們希望本教程包含所需的文檔。您將從本教程中學到什么:
第 1 步:什么是“步進電機”!
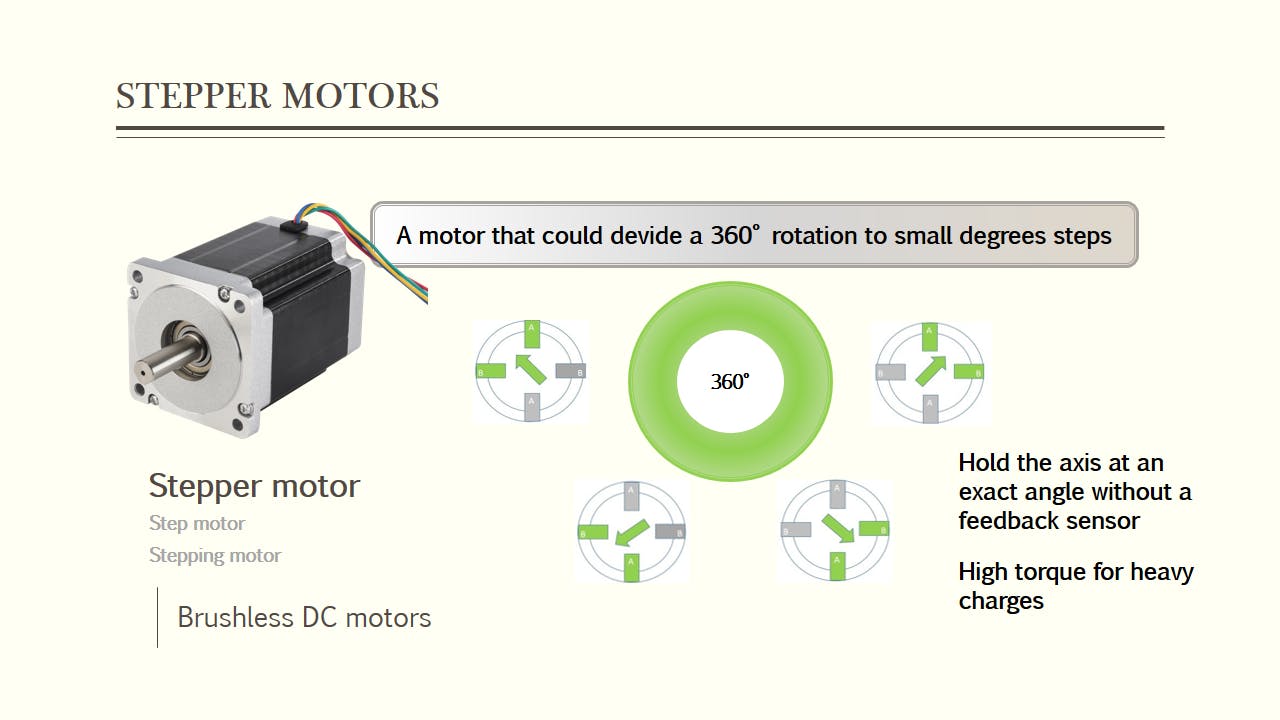
步進電機,又稱步進電機或步進電機,屬于無刷直流電動機,其特點是將一個完整的旋轉分成多個相等的步或我們更好地稱之為等角,可以控制電機的軸位置移動并且在沒有反饋傳感器的情況下保持在這些角度,并且由于其高扭矩容量,這種電機可以在負載重時保持電機軸保持穩定。
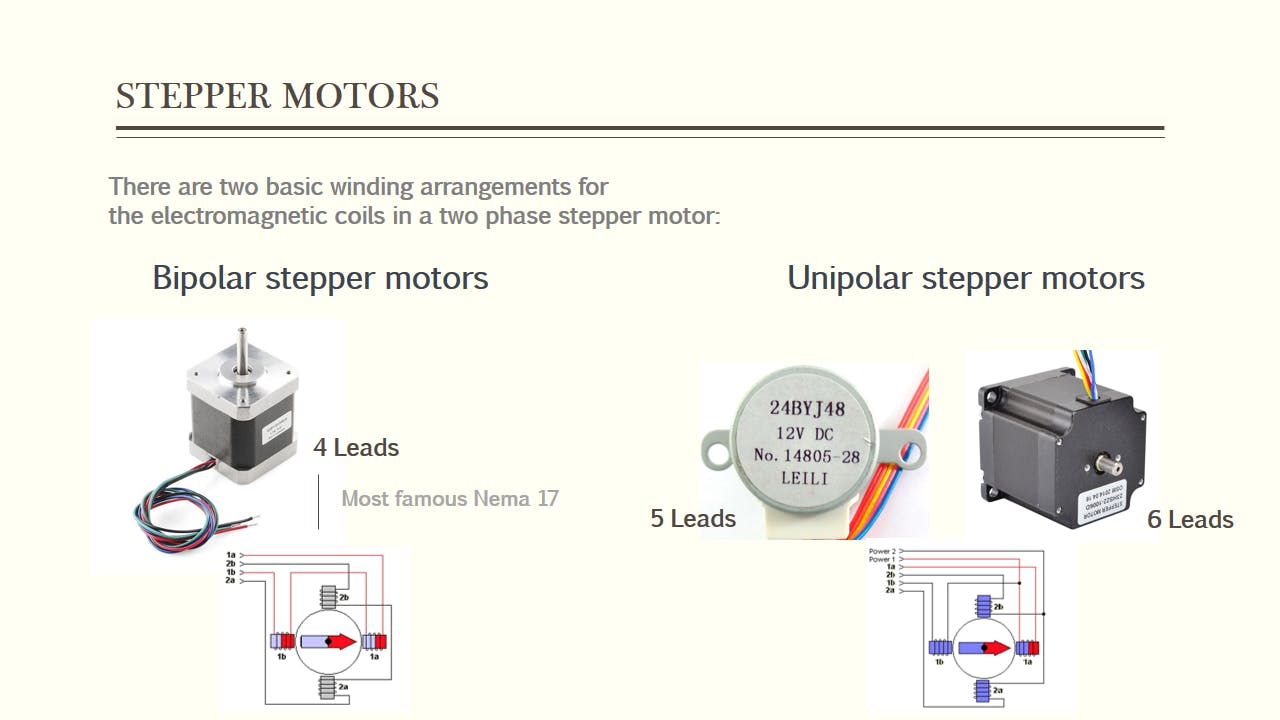
談到兩相的步進電機類別,我們有:
雙極電機
帶有 4 根線來控制線圈的電源極性
單極電機
它帶有 5 或 6 根線用于控制。
第 2 步:步進電機的工作原理
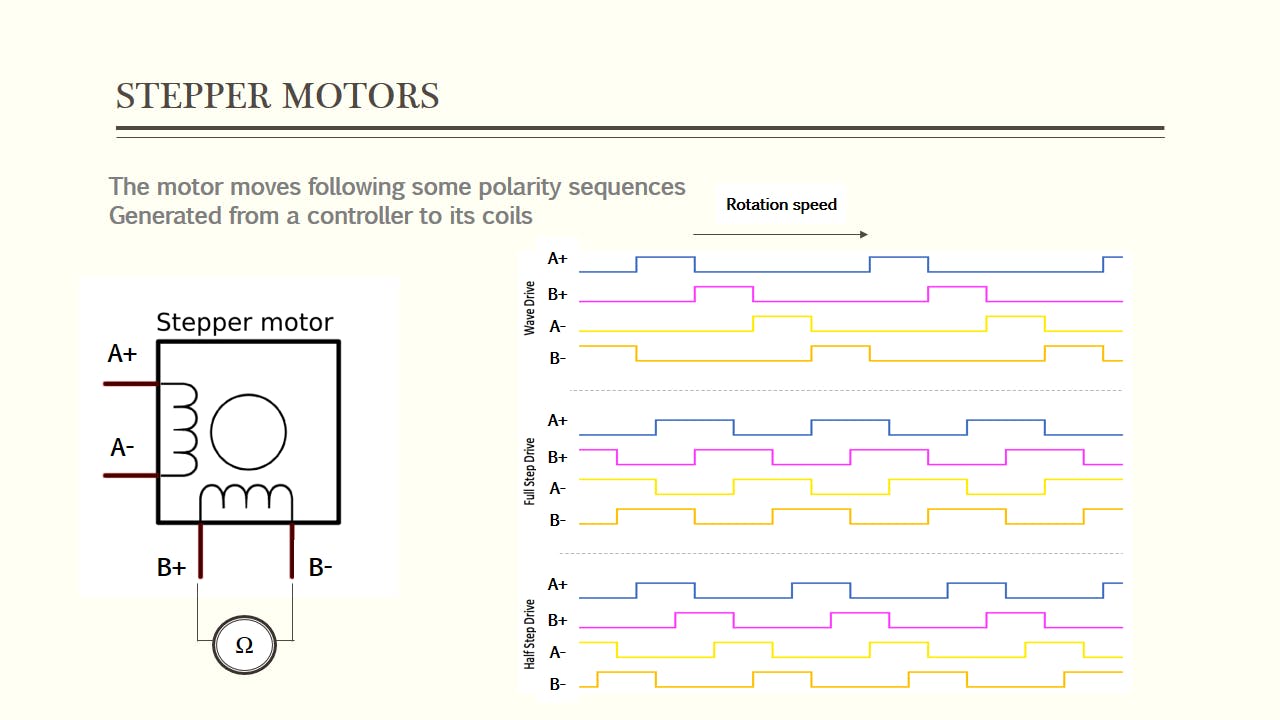
線圈用于控制電機按照某些極性順序執行的步驟。
兩個線圈雙極步進的典型驅動模式為:A+ B+ A? B?
我們可以通過測量步進連接線之間的電阻來用毫米定義線圈圖案,它應該測量每兩個線圈端之間的一些電阻,請查看上面的照片。
為了使步進器移動,控制器應通過步進驅動器發送一個電源極性序列,每次改變序列時,步進器以恒定速度沿精確方向執行一步,即序列速度,因此越快序列移動得越快,步進器旋轉得越快。
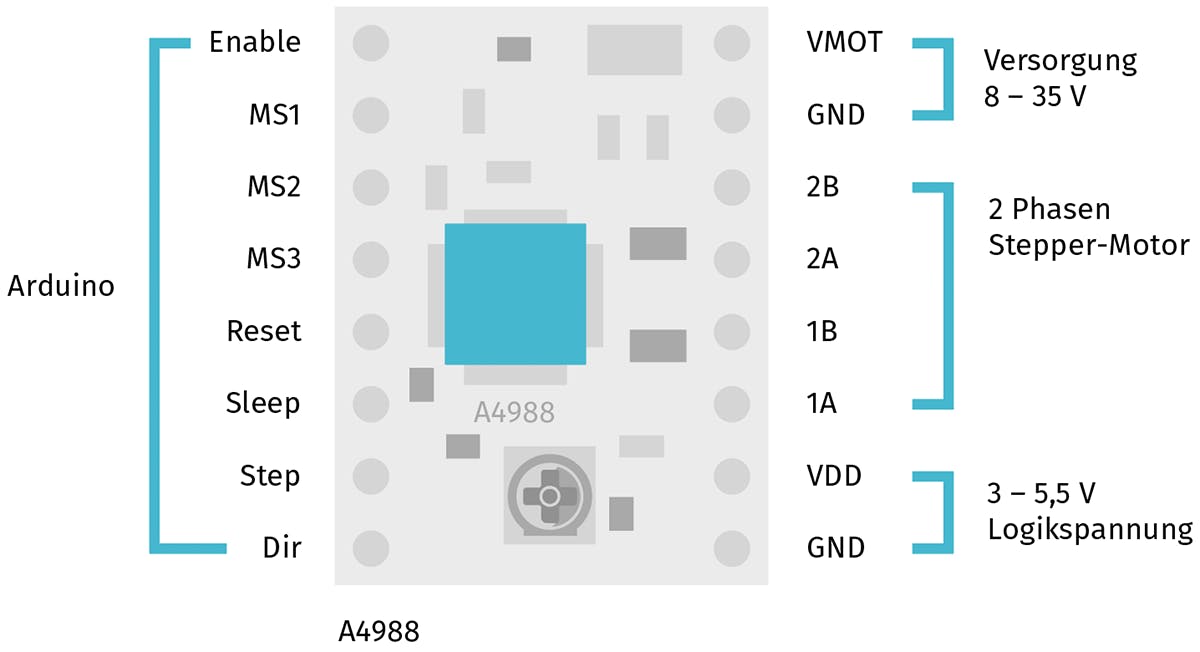
第 3 步:步進驅動器 A4988
回到控制驅動器,基本上是一些晶體管來控制流過步進線圈的電流。
在我們的教程中,我們將使用A4988驅動器,它使我們能夠輕松控制步進器的方向和速度,并且可以為電機提供高達 35V 2Amps 的輸出控制,驅動器將連接到我們的核心 Arduino Nano 板控制部分。
您可以在下面下載驅動程序完整數據表
第 4 步:電路圖
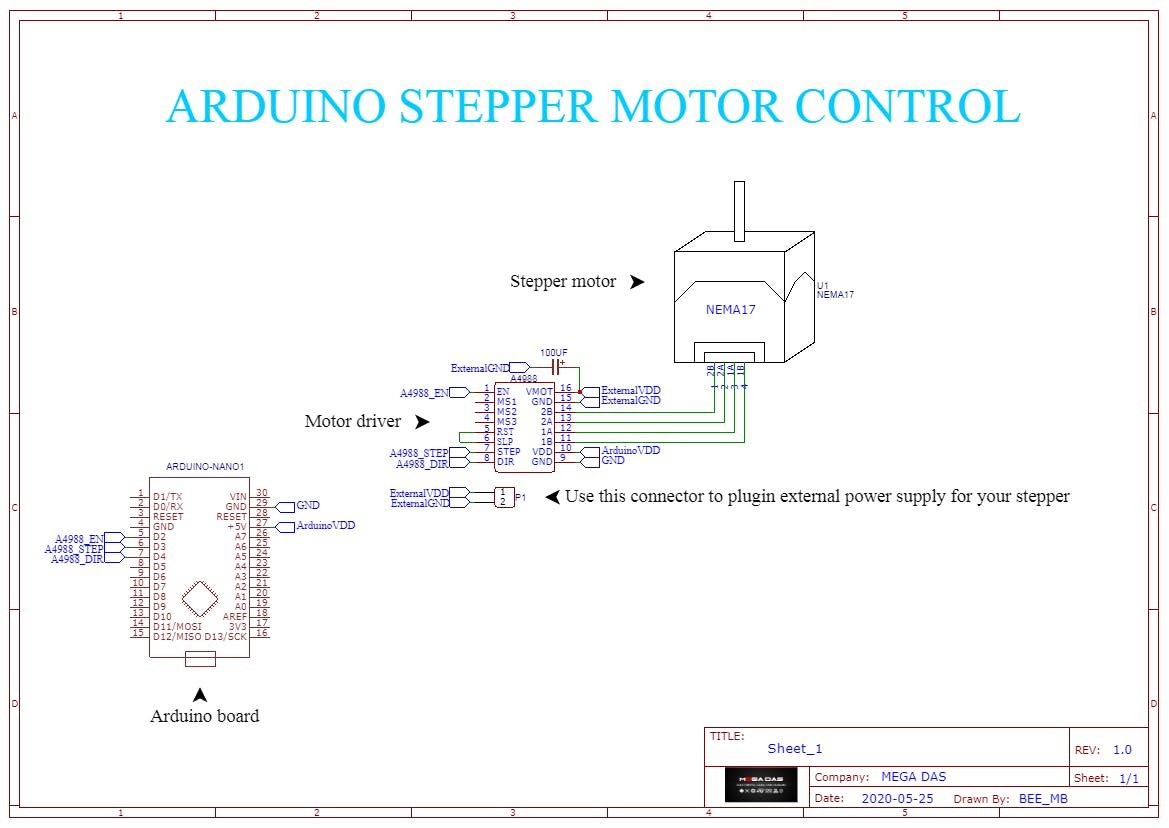
移動電路圖我使用EasyEDA平臺創建上述原理圖(您可以從下載鏈接PDF格式中獲得它),EasyEDA將幫助您輕松建立電路圖,然后將其轉換為PCB,因為它的內置功能您可以從JLCPCB 下訂單并訂購您的 PCB 。順便說一句,我邀請你們加入JLCPCB 為創客發布的新社區 HUB ,以便更多地參與社區。
回到我們的電路圖,如上圖所示,我們將 Arduino 板通過 A4988 驅動器連接到步進電機。
關于驅動程序,我們需要三個引腳來連接到 Arduino,它們是啟用、步進和方向引腳。
關于驅動器輸出,您將每個引腳連接到適當的線圈端。一件重要的事情是將睡眠和復位引腳相互連接,否則電機會顫抖并且不會移動。
第 5 步:代碼和測試
關于控制程序,此任務不需要庫,因此只需一些pinmode()和giditalWrite()函數
首先,我們設置引腳并將它們配置為 OUTPUT,我們將 Enable 輸出的初始值設置為 LOW 以激活步進電機驅動器。
const int EN=2; //ENABLE PIN
const int Step=3; // STEP PIN
const int dir=4; // DIRECTION PIN
/*----------------------------SETUP FUNCTION--------------------------*/
void setup()
{
pinMode(EN,OUTPUT); // ENABLE AS OUTPUT
pinMode(dir,OUTPUT); // DIRECTION AS OUTPUT
pinMode(Step,OUTPUT); // STEP AS OUTPUT
digitalWrite(EN,LOW); // SET ENABLE TO LOW
}
/*----------------------------LOOP FUNCTION--------------------------*/
void loop()
{
digitalWrite(dir,LOW); // SET DIRECTION LOW FOR FORWARD ROTATION
for(int x = 0; x < 1000; x++) // LOOP 1000 TIMES FOR 1000 RISING EDGE ON STEP PIN
{
digitalWrite(Step,HIGH); // STEP HIGH
delay(1); // WAIT
digitalWrite(Step,LOW); // STEP LOW
delay(1); // WAIT
}
delay(10); // DELAY BEFOR SWITCH DIRECTION
digitalWrite(dir,HIGH); // SET DIRECTION HIGH FOR BACKWARD ROTATION
for(int x = 0; x < 1000; x++) // LOOP 1000 TIMES FOR 1000 RISING EDGE ON STEP PIN
{
digitalWrite(Step,HIGH); // STEP HIGH
delay(1); // WAIT
digitalWrite(Step,LOW); // STEP LOW
delay(1); // WAIT
}
delay(10); // DELAY BEFOR SWITCH DIRECTION
}
關于方向銷,一旦我們將其設置為 LOW,步進器將向前移動,對于 HIGH,步進器將向后旋轉
現在方向引腳上的每個脈沖都會推動電機邁出一步,在這段代碼中,我們的電機將向前執行 1000 步,然后向后旋轉 1000 步。
不要對步進和完全旋轉感到困惑,因為我們的電機上的步進是 1.6 度角,而完全旋轉是 360 度角,所以我們的步進器幾乎會在每個方向上旋轉 5 圈。
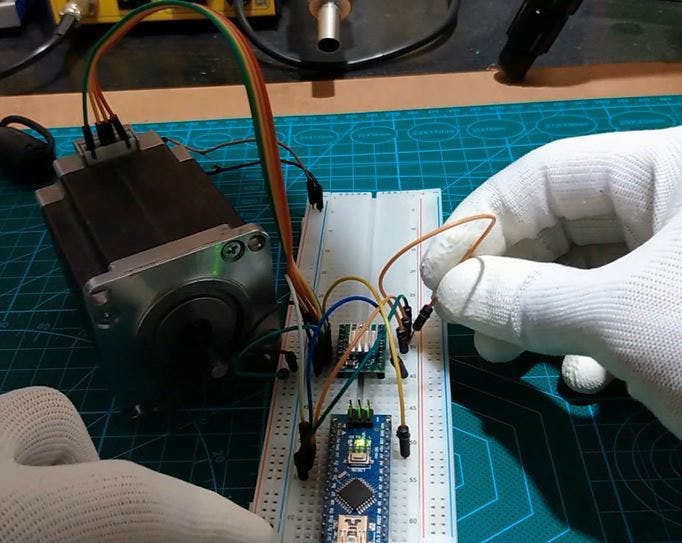
準備好電路后,如上圖所示,現在需要上傳代碼,然后我們為步進器插入外部電源,它應該應用在 Vmot 輸入引腳上。
不要忘記將復位引腳和睡眠引腳相互連接。
按照本教程,您現在可以控制和測試來自 3D 打印機等電子設備的步進電機。
通過評論部分讓我知道您還希望我為您制作哪些其他教程,如果您喜歡本教程,請不要忘記點贊本教程并關注我們以獲得更多精彩的項目。
?
- 步進電機基礎知識及接線方式
- 步進電機按步驅動
- 步進電機基礎知識
- BLDC電機基礎知識
- 基于DSP的步進電機速度控制系統 31次下載
- 電機控制的DSP程序設計及CAN基礎知識 44次下載
- 分散控制系統DCS基礎知識匯總文件下載 33次下載
- 步進電機基礎知識資料下載
- 三個被動元件的基礎知識及應用 20次下載
- 如何使用FPGA實現步進電機控制器 27次下載
- 步進電機的基礎知識和使用51單片機控制步進電機的程序免費下載
- 電機基礎知識及調速 0次下載
- 開關磁阻電機基礎知識 4次下載
- BLDC電機基礎知識 0次下載
- 步進電機知識大全
- 步進電機的控制原理與應用實例 2.6k次閱讀
- 步進電機控制器電路圖 步進電機控制器的分類及其特點 6.5k次閱讀
- 什么是步進電機控制器?步進電機控制器電路圖 5.1k次閱讀
- 步進電機控制系統是什么意思 2.5k次閱讀
- 雙極性步進電機的結構與控制模式 1.7k次閱讀
- 步進電機控制器電路圖分享 8.6k次閱讀
- 電機與電氣控制技術的基礎知識 3.9k次閱讀
- 步進電機控制器與伺服電機控制器的區別 9.9k次閱讀
- 步進電機如何控制速度 1.7w次閱讀
- 步進電機控制器原理_步進電機控制器編程實例 1.7w次閱讀
- 什么是步進電機?步進電機的種類 8.5k次閱讀
- 基于單片機的步進電機轉速控制設計詳解(附程序) 2.8w次閱讀
- 伺服電機與步進電機控制的區別詳解 2w次閱讀
- 步進電機控制系統的設計及應用案例 1.5w次閱讀
- 單片機控制步進電機的原理 8.6w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數據手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費



 工商網監
工商網監
評論