|
為了使控制系統能可靠地工作,不但要求它能穩定,而且還希望有足夠的穩定裕量,使系統在環境發生變化或存在干擾的情況下仍能工作,這即為相對穩定性的概念。
在討論系統的穩定裕量時,首先要假定開環系統是穩定的,是最小相位系統,即開環系統的零、極點均僅位于s的左半平面,否則討論系統的穩定裕量是無意義的。
為了說明相對穩定性的概念,圖5-49為一典型的I型系統 曲線,其開環系統的傳遞函數為: 曲線,其開環系統的傳遞函數為: 。根據奈氏判據可知,當 。根據奈氏判據可知,當 時,系統不穩定,奈氏曲線包圍(-1,j0)點;當 時,系統不穩定,奈氏曲線包圍(-1,j0)點;當 時,系統產生等幅振蕩,奈氏曲線經過(-1,j0)點;當 時,系統產生等幅振蕩,奈氏曲線經過(-1,j0)點;當 時,系統穩定,奈氏曲線不包圍(-1,j0)點。因此直觀地看,對于開環穩定的系統,要求閉環系統有一定的穩定性,不僅要求 時,系統穩定,奈氏曲線不包圍(-1,j0)點。因此直觀地看,對于開環穩定的系統,要求閉環系統有一定的穩定性,不僅要求 的幅頻特性不包圍(-1,j0)點,而且應與該點有一定的距離,即有一定的穩定裕量。 的幅頻特性不包圍(-1,j0)點,而且應與該點有一定的距離,即有一定的穩定裕量。
衡量閉環系統相對穩定性的具體指標有幅值裕量 和相位裕量 和相位裕量 。在Matlab中,相應地有專門的函數來求取上述指標:Margin。具體用法參見下面的例子。 。在Matlab中,相應地有專門的函數來求取上述指標:Margin。具體用法參見下面的例子。
5.5.1 用奈氏圖表示相位裕量和幅值裕量
1、 相位裕量
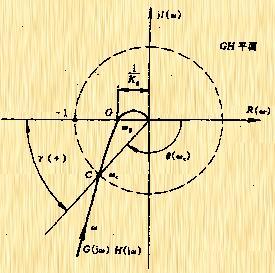
設一開環穩定的系統的奈氏曲線 負實軸相交于G點,與單位圓相交于C點,如圖5-50。對應于 負實軸相交于G點,與單位圓相交于C點,如圖5-50。對應于 時的頻率 時的頻率 (交點C)稱為增益穿越頻率,又稱剪切頻率或交界頻率。在剪切頻率 處,使系統達到臨界穩定狀態時所能接受的附加相位遲后角,定義為相位裕量,用 (交點C)稱為增益穿越頻率,又稱剪切頻率或交界頻率。在剪切頻率 處,使系統達到臨界穩定狀態時所能接受的附加相位遲后角,定義為相位裕量,用 表示之。對于任何系統,相位裕量 的算式為 表示之。對于任何系統,相位裕量 的算式為
式中, 是開環頻率特性在剪切頻率 是開環頻率特性在剪切頻率 處的相位。 處的相位。
不難理解,對于開環穩定的系統,若 ,表示 ,表示 曲線包圍(-1,j0)點,相應的閉環系統是不穩定的;反之,若 ,則相應的閉環系統是穩定的。一般 曲線包圍(-1,j0)點,相應的閉環系統是不穩定的;反之,若 ,則相應的閉環系統是穩定的。一般 越大,系統的相對穩定性也就越好。因為系統的參數并非絕對不變,如果 太小,就有可能因參數的變化而使奈奎斯特曲線包圍(-1,j0)點,即導致系統不穩定。 越大,系統的相對穩定性也就越好。因為系統的參數并非絕對不變,如果 太小,就有可能因參數的變化而使奈奎斯特曲線包圍(-1,j0)點,即導致系統不穩定。
2、 幅值裕量
幅值裕量是系統相對穩定性的另一度量指標。如圖5-50所示,開環頻率特性的相角 時的頻率 時的頻率 (交點G)處, 稱為相位穿越頻率,又稱為相位交界頻率。開環幅值 (交點G)處, 稱為相位穿越頻率,又稱為相位交界頻率。開環幅值 的倒數稱為增益裕量,用 的倒數稱為增益裕量,用 表示。即 表示。即
上式表示系統在變到臨界穩定時,系統的增益能增大多少。
由奈奎斯特穩定判據可知,對于最小相位系統,其閉環穩定的充要條件是 曲線不包圍(-1,j0)點,即 曲線與其負實軸交點處的模小于1,此時對應的 曲線不包圍(-1,j0)點,即 曲線與其負實軸交點處的模小于1,此時對應的 。反之,對于不穩定的系統,其 ,如圖5-51所示,閉環系統是不穩定的。 。反之,對于不穩定的系統,其 ,如圖5-51所示,閉環系統是不穩定的。
5.5.2 用伯德圖表示相位裕量和幅值裕量
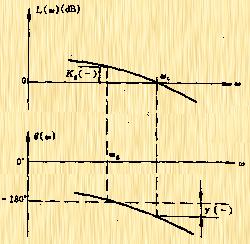
上述的相位裕量和幅值裕量也可在對數幅相圖(Bode圖)上表示。對應于圖5-50,其Bode圖如圖5-52所示。圖5-50中的增益穿越頻率 對應于圖5-52的零分貝線上的點,即開環對數幅頻特性曲線與 對應于圖5-52的零分貝線上的點,即開環對數幅頻特性曲線與 軸的交點;圖5-50中相位穿越頻率 軸的交點;圖5-50中相位穿越頻率 的點在Bode圖上是對應相角 的點在Bode圖上是對應相角 的點,即相頻曲線與 水平線的交點。從圖5-50可見,相頻特性曲線上對應于增益穿越頻率 的點位于 水平線的上方。 的點,即相頻曲線與 水平線的交點。從圖5-50可見,相頻特性曲線上對應于增益穿越頻率 的點位于 水平線的上方。
在Bode圖上,增益裕量常用分貝數表示,即
上式表示系統在到達臨界穩定前,允許系統增益增大的倍數。對于穩定的系統,由于 <1,即 <1,即 為負,由式(5-56)可知,增益裕量為正,這時對數幅頻特性曲線上對應 為負,由式(5-56)可知,增益裕量為正,這時對數幅頻特性曲線上對應 的點在 的點在 軸下方,如圖5-52;當系統不穩定時,相應地,可將圖5-51繪制在Bode圖上,如圖5-53,這時相位裕量和幅值裕量均是負的。 軸下方,如圖5-52;當系統不穩定時,相應地,可將圖5-51繪制在Bode圖上,如圖5-53,這時相位裕量和幅值裕量均是負的。
增益裕量和相位裕量通常作為設計控制系統的頻域性能指標。大的增益裕量和相位裕量表明控制系統是非常穩定的,但此時控制系統的響應速度將是非常慢的,而當增益裕量接近1或相位裕量接近零時,則對應一個高度振蕩的系統。因此從工程的角度出發,一般控制系統設計時采用如下的裕量范圍是比較合適的: 在 在 到 到 之間,增益裕量大于6dB。 之間,增益裕量大于6dB。
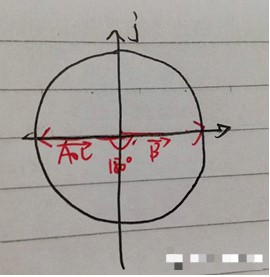
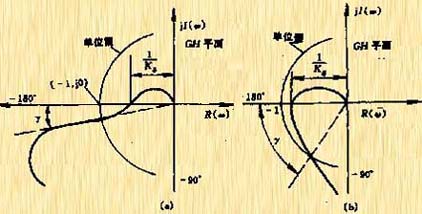
同時需要指出,單獨使用增益裕量或相位裕量作性能分析,都不足以說明系統的相對穩定性,必須同時給出這兩個穩定裕量。對于大多數控制系統來說,這兩個指標是統一的,但有時情況并非如此,圖5-54a、圖5-54b分別表示了這兩種情況下的頻率特性。
圖5-54 開環控制系統的奈氏圖
(a) 好的幅值裕量和差的相角裕量
(b) 好的相角裕量和差的幅值裕量
|
例5-10 試求:(1)K=1時系統的相位裕量和增益裕量。(2)要求通過增益K的調整,使系統的增益裕量 ,相位裕量 。 ,相位裕量 。
例5-10 試求:(1)K=1時系統的相位裕量和增益裕量。(2)要求通過增益K的調整,使系統的增益裕量 ,相位裕量 。
已知一單位反饋系統的開環傳遞函數為
解 (1)基于在 處的開環頻率特性的相角為 處的開環頻率特性的相角為
即
由三角函數的性質,有
求得 。 。
同時,在  處的開環對數幅值為 處的開環對數幅值為
則
根據K=1時的開環系統傳遞函數,可知系統的 ,從而 ,從而
此小題也可用Matlab直接求解。
g=tf(1,conv([1,0],conv([0.2,1],[0.05,1])))
Transfer function:
1
-----------------------
0.01 s^3 + 0.25 s^2 + s
margin(g)
(2)由題意得 ,即 。在 處的對數幅值為 ,即 。在 處的對數幅值為
上式簡化后為
解之得,K=2.5。
根據 的要求,則得
即
利用三角函數的性質,可求得 。于是有
即
求解上式得 。不難看出,K取2.5就能同時滿足 和 的要求。
5.5.3 對數幅頻特性中頻段與系統動態性能的關系
在分析控制系統的開環對數幅相頻率特性時,習慣上將頻率范圍分為三個頻段:低頻段、中頻段和高頻段。其中低頻段反映了控制系統的靜態特性,關于此點在5.3.4中我們作了分析;中頻段則反映了系統的動態特性,這是控制設計中一個非常關心的問題,這將在下面作介紹;高頻段則主要反映了系統的抗干擾能力,對動態性能影響不大,將不作介紹。
中頻段的主要參數有:剪切頻率 、相位裕量 和中頻寬度h。對于圖5-56所示系統,其中頻寬度一般定義在斜率等于 、靠近 處:
一般要求最小相位系統的開環對數幅頻特性在 處的斜率等于 。如果在該處的斜率等于或小于為 ,則對應的系統可能不穩定,或者系統即使穩定,但因相位裕量較小,系統的穩定性也較差。下面通過二階系統和三階系統對上述結論進行說明。
設一標準二階系統的開環傳遞函數為:
式中,自然振蕩頻率 ,阻尼比 ,其中 為轉角頻率,則: ,阻尼比 ,其中 為轉角頻率,則:
(1) 當 時, ,如圖5-57a示,階躍響應是衰減較慢的振蕩過程;
(2) 當 時, ,如圖5-57b示,階躍響應是衰減較快的振蕩過程;
(3) 當 時, ,如圖5-57c示,階躍響應是接近無振蕩的非周期過程;
再設一個三階系統的開環傳函數為:
取K=0.1,1,10,100,得到如圖5-58的幅頻曲線a,b,c,d。由圖可見。當 時,式(5-59)的對數幅頻特性曲線如圖5-58所示的曲線 。剪切頻率 在斜率為 的區段內,對照圖5-58下部的相頻特性曲線可知,相位裕量為 ,因此閉環系統是穩定的。若開環放大系數K值減小,則對數幅頻特性曲線向下垂直移動。這時剪切頻率 向左移動[注意,K變化時,系統的相頻特性曲線 不變。由圖5-58可知,相位裕量 將增大。當剪切頻率 移至斜率為 的區段內時,相位裕量 將更大,如圖5-58的曲線b所示。反之,增大開環放大系數K,剪切頻率 將向右移動,相位裕量 將減小,當 移至 時( 為相位穿越頻率), ,閉環系統處于臨界穩定。當 時, ,這時對數幅頻特性曲線的中頻段斜率仍為 ,如圖5-58曲線c所示。因這時 為負值,所以閉環系統已不穩定了。如果開環放大系數K繼續加大,使剪切頻率 ,如圖5-58曲線c所示。因這時 為負值,所以閉環系統已不穩定了。如果開環放大系數K繼續加大,使剪切頻率 落在對數幅頻特性曲線斜率為 落在對數幅頻特性曲線斜率為 的區段內,如圖5-58曲線b所示。這時相位裕量 的區段內,如圖5-58曲線b所示。這時相位裕量 “負”得更歷害,系統將更加不穩定。 “負”得更歷害,系統將更加不穩定。
根據上述分析,可得到如下結論:為使閉環系統穩定且系統的階躍響應無超調量或或超調很小,應使剪切頻率 位于斜率為 位于斜率為 的線段上,同時要有一定的中頻寬度,中頻段越寬,則階躍響應越接近非周期過程。 的線段上,同時要有一定的中頻寬度,中頻段越寬,則階躍響應越接近非周期過程。 |  電子發燒友App
電子發燒友App


 347
347


 0
0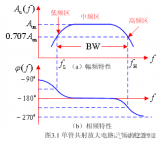




 工商網監
湘ICP備2023036445號-105-1
工商網監
湘ICP備2023036445號-105-1












評論