 用于自動駕駛車輛的速度控制的參數
用于自動駕駛車輛的速度控制的參數

在自動駕駛研究的道路上,中國和美國是處于領先地位的。而國內首家自動駕駛研究代表為百度。早在今年3月份,中國也有了自己的一份《北京市自動駕駛車輛道路測試2018年度工作報告》,其中百度以45輛自動駕駛車輛規模,約14萬公里的安全測試記錄遙遙領先。這很大程度上反應了百度的自動駕駛研究技術的強大。
自動駕駛車輛中的運動規劃和控制是關鍵操作點。而車輛中的運動規劃和控制是與系統給定的路徑的曲率和速度來估計完成給定路徑的難度的。這其中屬速度控制機制最為復雜,但是速度控制(例如,油門、制動器)動態模型在增加自動駕駛中的車輛路徑跟蹤精度方面是至關重要的。接下來小編將詳細介紹百度公司的專利中提出的方法是如何解決這個難題的。
自動駕駛車輛中的速度控制過程如圖1所示,整體上來看,整個過程圖以速度控制器模塊為中心接收到的輸入數據有三大部分:
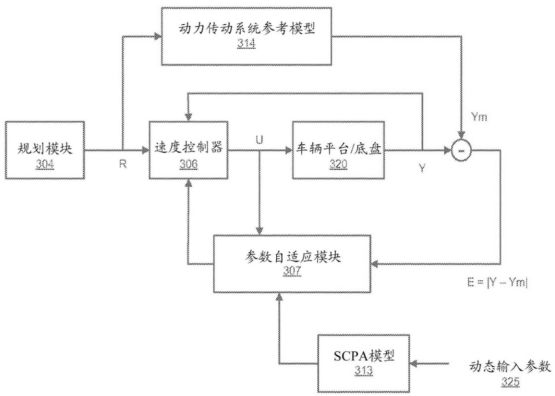
圖1速度控制器的過程圖
1)第一是規劃模塊根據自動駕駛汽車的決策數據生成汽車的目標速度(R)的規劃和控制數據。
2)第二是車輛的實際速度(Y),它是響應于速度控制命令而測量的。
3)第三部分的輸入是最復雜的,也是最重要的,主要是參數自適應模塊的輸出數據,而參數自適應模塊的輸出是由三個反饋參數決定的。
其一是自動駕駛汽車實際速度和預期速度之間的差值反饋。其二是速度控制參數調整模型SCPA的輸出反饋數據。SCPA模型是基于在先駕駛統計信息離線地創建和建模的機器學習模型,其中模型的輸入是運行時被捕獲或測量的動態輸入參數,包括天氣狀況、道路狀況、當前交通狀況、風阻、地圖位置和/或興趣點、車輛的重量、車輪的輪胎壓力和當前作為車輛乘客的用戶的用戶駕駛偏好等。其三是實際速度命令。
速度控制器根據輸入的三部分數據,將速度控制命令U作為輸出,輸出到車輛平臺和參數自適應模塊。
接下來,詳細的了解一下操作自動駕駛車輛的速度控制器的速度控制參數的過程,如圖2所示。
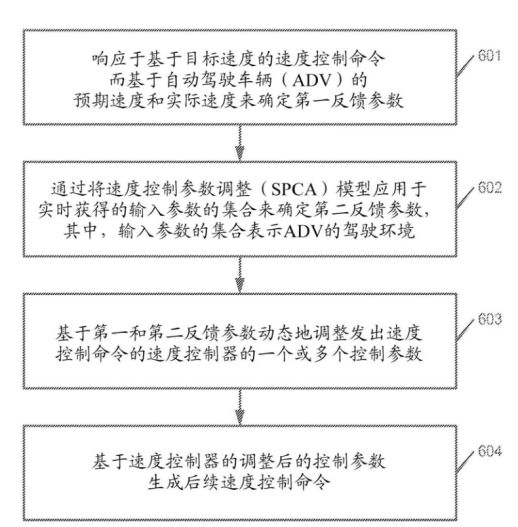
在操作601中,處理邏輯響應于基于目標速度發出的速度控制命令而基于ADV的預期速度和實際速度來確定第一反饋參數。
在操作602中,處理邏輯通過將SPCA模型應用于實時獲得的輸入參數的集合來確定第二反饋參數。
在操作603中,處理邏輯基于第一和第二反饋參數動態地調整發出速度控制命令的速度控制器的一個或多個控制參數(例如,系數、增益)。
在操作604中,處理邏輯基于速度控制器的調整后的控制參數生成后續的速度控制命令。
盡管速度控制機制很是復雜的,但是百度公司巧妙得利用多方面參數迭代反饋的方式,讓自動駕駛汽車的速度控制參數不斷更新,從而減少模型預計產生的誤差,這種方式讓小智很是受益。
-
百度
+關注
關注
9文章
2377瀏覽量
94880 -
自動駕駛
+關注
關注
793文章
14882瀏覽量
179847
原文標題:百度專利帶你了解自動駕駛車輛如何控制速度?
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
自動駕駛端到端為什么會出現黑盒現象?

自動駕駛汽車如何完成超車?

自動駕駛汽車如何實現自動駕駛

如何設計自動駕駛傳感器失效檢測與容錯策略?

語言模型是否是自動駕駛的必選項?

自動駕駛中常提的ODD是個啥?

小馬智行第七代自動駕駛車輛三城開跑
什么是自動駕駛數據標注?如何好做數據標注?

百度Apollo向北京工商大學捐贈自動駕駛車輛
小馬智行第七代自動駕駛車輛廣深開跑
新能源車軟件單元測試深度解析:自動駕駛系統視角

大模型如何推動自動駕駛技術革新?




 工商網監
工商網監
評論