") 高解析度Matrix矩陣LED的汽車大燈技術(shù)將汽車照明技術(shù)帶入了新的階段
高解析度Matrix矩陣LED的汽車大燈技術(shù)將汽車照明技術(shù)帶入了新的階段

摘要
高解析度Matrix矩陣LED的汽車大燈技術(shù)將汽車照明技術(shù)帶入了新的階段,傳統(tǒng)測量方法已經(jīng)很難滿足其性能評價(jià)需要。需要?jiǎng)?chuàng)新的測量評估技術(shù)。本文從快速配光測試及LED像素亮度測量兩個(gè)方面進(jìn)行了詳細(xì)描述,包括測試原理、測試方案、數(shù)據(jù)處理、算法,以及影響因素等。其中的快速配光測試方案,也可適用其它AFS智能大燈產(chǎn)品。
當(dāng)前市場上的自適應(yīng)頭燈中,多采用多顆LED組件彼此并排排列安裝在頭燈中,需要額外安裝電子元件控制LED組件的開關(guān)或強(qiáng)度,并且需要針對不同場景設(shè)定照明配光模式。隨著LED技術(shù)的發(fā)展,智能高分辨率頭燈的問世將自適應(yīng)大燈帶入了新的發(fā)展階段。
典型產(chǎn)品如歐司朗的μAFSLED前燈,包含3個(gè)LED光源,每個(gè)光源還有1024個(gè)獨(dú)立可控的點(diǎn)光源(像素)。這意味著頭燈可準(zhǔn)確適應(yīng)具體的交通狀況,確保隨時(shí)保持最優(yōu)照明效果。
圖1:歐司朗μAFS高解析度MatrixLED頭燈
這種高解析度的自適應(yīng)頭燈,對測試技術(shù)提出了新的挑戰(zhàn),除了需要滿足傳統(tǒng)的配光測試需求外,還需要考慮另外兩個(gè)特點(diǎn):
1)復(fù)雜多變的配光測試:在較短的時(shí)間內(nèi)完成多種場景下的配光測量
2)LED像素的光學(xué)性能評價(jià):測試到每個(gè)像素的亮度信息。
快速配光測試
汽車前燈的空間光強(qiáng)分布通常通過角度計(jì),在規(guī)定距離,進(jìn)行掃描測試。這種測試方法不僅需要較大的測試空間(通常為25米測試距離),而且需要花費(fèi)大量的時(shí)間(從幾十分鐘到幾個(gè)小時(shí))。對于自適應(yīng)智能大燈,僅僅通過法規(guī)測試不能滿足要求,最好可以滿足一下特點(diǎn):
1)測試速度快:即可在較短的時(shí)間內(nèi)完成不同模式下配光測試,還可監(jiān)控配光本身的穩(wěn)定性,例如通過動態(tài)測試,監(jiān)控明暗截止線或肘點(diǎn)的穩(wěn)定性。
2) 具備自動明暗截止線、肘點(diǎn)識別及Re-aim功能,以滿足法規(guī)測試需求
3)鑒于白光LED的空間顏色不均勻特點(diǎn),最好能兼顧顏色特性測試。
如果前燈的光束直接照射在投影幕墻上,投射到幕墻上的光通量在墻上產(chǎn)生一個(gè)照度值,這樣可以通過圖像解析的亮度計(jì)得到該墻面的亮度分布。如果該墻面及房間參數(shù)足夠理想,就可以從亮度圖像計(jì)算得到相應(yīng)的照度分布以及光強(qiáng)分布。除此之外,可以得到任意平面的照度分布圖(如路面照度分布,10米遠(yuǎn)處的投影屏照度分布等),也可以得到半球空間的照度分布(就像ECE規(guī)定的25米半徑的前照燈照度分布)。
如上所述,是一個(gè)非常有吸引力的快速測試方法,只需要幾秒就可以完成前燈的光學(xué)測量。
圖2:25米半球范圍內(nèi)的車燈(近光燈)照度分布圖,用偽彩色表示照度值,坐標(biāo)為角度坐標(biāo)
測試原理
兩維的亮度空間分布L(x,y)是一個(gè)與人眼視覺系統(tǒng)相關(guān)的物理量。然而,在大燈測試評價(jià)領(lǐng)域,人們更加關(guān)心照度值。所以,必須進(jìn)行必要的光度學(xué)轉(zhuǎn)換。入射的光通量中的一部分被反射表面所反射(反射率ρ),另外的被吸收,反射部分可以是鏡面反射,也可以是漫反射,也可以是二者混合。如果反射是理想的漫反射,則亮度值L(?,?)就與光束的方向無關(guān),L(x,y,?,?)=L(x,y)≠f(?,?),換種說法,即不同的測試方向得到的亮度值與該處的照度值E(x,y).的比值為一固定常數(shù)。如果一個(gè)反射表面滿足完全漫反射條件,就可以通過圖像解析的亮度測試技術(shù)直接得到空間的照度分布。
由于采用了漫反射屏作為測試中介,因此我們稱之為間接法測量。
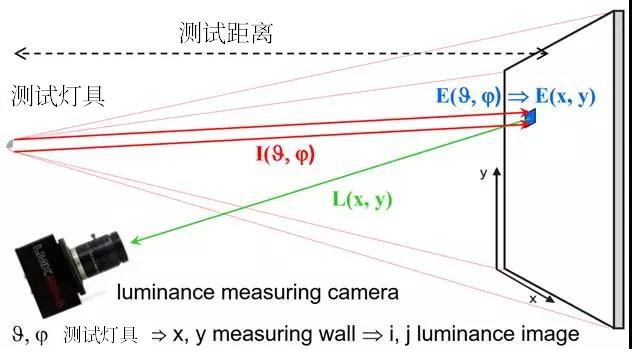
圖3:間接法快速配光測試原理示意圖
雜散光
在對光進(jìn)行測試時(shí),必須注意,只能讓被測量的光進(jìn)入光接收器件(LMK成像亮度計(jì)),否則,光源在任意表面產(chǎn)生的反射光都有可能進(jìn)入光接收器,從而使得測試結(jié)果偏離。所有非測試需要的光統(tǒng)稱為雜散光,反應(yīng)在亮度圖像上,可以在全部或局部增加亮度,在本測試項(xiàng)目中,雜散光對暗區(qū)影響,導(dǎo)致亮度值增大,實(shí)際上,在該區(qū)域,亮度應(yīng)該更弱,甚至完全沒有強(qiáng)度信號。這樣就影響了最終的測試結(jié)果。實(shí)際測試發(fā)現(xiàn),在對比度超過1:200的情況下,與真實(shí)值的偏離將非常嚴(yán)重,而且,圖像的對比度將會降低。
雜散光來源分析及消除
雜散光由不符合要求的反射、光源以及一些透射材料產(chǎn)生,這些現(xiàn)象既產(chǎn)生于圖像系統(tǒng)本身(如鏡片之間的反射),也產(chǎn)生于房間布置的本身。
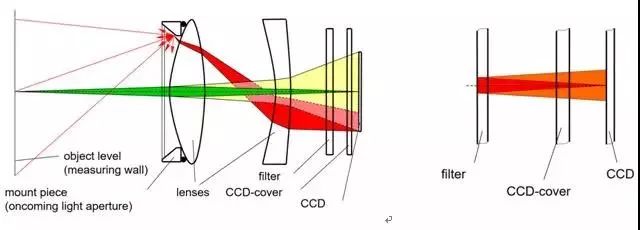
圖4:雜散光來源分析示意圖
亮度圖像測試系統(tǒng)的雜散光可以通過設(shè)計(jì)減小雜散光(消光漆、設(shè)置光闌)。房間導(dǎo)致的雜散光主要有照射表面,光源本身,可以通過減低表面反射率,設(shè)置遮光光闌限制天花板或地面的反射光影響等。因此要獲得準(zhǔn)確的測試結(jié)果,需要對房間進(jìn)行嚴(yán)格的設(shè)計(jì)和精確的安裝。圖5是一個(gè)理想的實(shí)際測試暗室的布置示意圖。
圖5:快速配光測試暗室房間仿真設(shè)計(jì)圖
通過軟件進(jìn)行雜散光修正補(bǔ)償
在測試系統(tǒng)中,雜散光無法完全消除,任何殘留的雜散光都必須通過軟件的方法予以修正,下圖是近光燈照度分布圖在雜散光修正前后的對比。
圖6:10米墻面的亮度圖像,左邊有雜散光,右邊是軟件對雜散光修正后的亮度圖像
測試實(shí)例
對于汽車前燈測試來講,通常會用25米距離的照度分布來計(jì)算其光強(qiáng)分布。這種方法主要是將被測試的光源放在一個(gè)可以在J,j方向進(jìn)行轉(zhuǎn)動的角度計(jì)上,來得到照度分布。為了快速得到一個(gè)可靠的測試結(jié)果,間接法快速配光測試的最佳測試距離采用10米。
根據(jù)之前的描述,通過投影墻上的亮度分布可以得到照度分布。可以按照圖5的要求建立暗室,對房間進(jìn)行定標(biāo),包含:空間位置校正、光學(xué)校正、雜散光校正。經(jīng)過這些校正,結(jié)合亮度計(jì)在室內(nèi)的位置、前燈到墻的距離、前燈的高度等來計(jì)算各種光學(xué)量的空間分布:
1) 投影幕墻上的照度分布
2) 球面坐標(biāo)下的照度分布 (例如r = 25 m)
3) 光強(qiáng)分布,以及在路面上的水平或垂直方向的照度分布
圖7:從投影幕墻上測得的亮度分布,計(jì)算出的路面垂直照度分布
除此之外,還可以在現(xiàn)有的25米暗室(或信號燈測試的3.16米暗室)基礎(chǔ)上,進(jìn)行改造,節(jié)省空間和預(yù)算。其中測試幕墻上開孔,讓光線可以穿過到達(dá)25米遠(yuǎn)處光度探頭。開孔部分的光學(xué)數(shù)據(jù)可以通過轉(zhuǎn)動燈具補(bǔ)測給與補(bǔ)償修正。
圖8:通過改造后的25米配光測試暗室兼具快速配光測試功能
肘點(diǎn)(elbow point)識別及Re-aim功能
由于采用成像的方法進(jìn)行配光光型測試,因此在近光燈測試的時(shí)候,可以通過圖像處理算法在光強(qiáng)分布圖上識別到其肘點(diǎn)(elbowpoint)。找到肘點(diǎn)后,就可以自動將光強(qiáng)分布圖進(jìn)行坐標(biāo)平移,移至基準(zhǔn)中心點(diǎn)(0;0=HV),這樣在實(shí)際測試的時(shí)候,只需將燈具進(jìn)行粗略的對準(zhǔn),即可開始測試。
由于需要與相關(guān)的測試法規(guī)一致,用戶通常需要根據(jù)測試法規(guī)進(jìn)行Re-aim操作,即在檢測到的肘點(diǎn)的一定區(qū)域內(nèi)尋找替代肘點(diǎn),對指定的測試點(diǎn),如HV,B50L,等,依據(jù)法規(guī)進(jìn)行合規(guī)性判斷。只有測試區(qū)域的所有點(diǎn)滿足了測試指標(biāo),才可以認(rèn)為該前燈符合法規(guī)。Re-aim功能在圖像處理上,非常容易實(shí)現(xiàn)。
圖9:可視化展示肘點(diǎn)(ElbowPoint)及ECE測試點(diǎn)
得到肘點(diǎn)elbowpoint,無論是這一點(diǎn)還是HV點(diǎn),可以直觀的顯示在軟件上,如圖9所示,而且還可以輸出其它數(shù)據(jù),例如通過位置移動通過法規(guī)的測試點(diǎn)數(shù)量,相對于肘點(diǎn)的任意位置點(diǎn)的光強(qiáng)值。通過若干模組測試的統(tǒng)計(jì),或不同時(shí)間的測試結(jié)果,可以分析一些趨勢信息,例如肘點(diǎn)位置相對于光軸的變化信息、最大值、最小值,(與光軸相關(guān)肘點(diǎn)偏離、多個(gè)測試中的最大、最小值等),明暗截止線(AK31)的強(qiáng)度等,這些數(shù)據(jù)可以保存在文件中,也可以以圖形的形式輸出。
圖像拼接
受限于房間大小,尤其是測試墻的寬度,水平方向單次測量的寬度有限,例如6米寬度約±24°,通過轉(zhuǎn)動燈具(3X45°),分別測試,然后進(jìn)行拼接,可實(shí)現(xiàn)大范圍測量。轉(zhuǎn)臺可以采用獨(dú)立的轉(zhuǎn)臺,或現(xiàn)有的25米配光角度計(jì)的轉(zhuǎn)臺。
圖10:拼接圖像及測試定示意圖(圖中暗區(qū)黑洞為測試墻上的開洞,用于25m探頭測試光強(qiáng))
對明暗截止線附近的顏色特性進(jìn)行分析
傳統(tǒng)的鹵素?zé)艋螂瘹鉄簦捎诠鈱W(xué)元件的色散,在明暗截止線區(qū)域有明顯的色環(huán)現(xiàn)象,LED燈具本身具有空間的色不勻現(xiàn)象,疊加光學(xué)色散現(xiàn)象,因此對該位置進(jìn)行色彩測量非常必要。本測試方案中的LMK具備色彩測量功能,可以獲得色彩分布圖像,如圖,在水平–0.5°的位置,選取+2°到–2°的區(qū)間進(jìn)行色彩分析,圖表所示既是該位置的色彩變化特性。
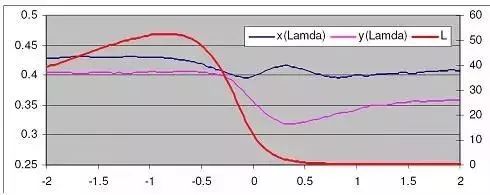
圖11:明暗截止線區(qū)顏色分布特性測試
在更小的空間進(jìn)行測量
上文所述的車燈測試方法,需要較大的空間,通過專門定制的聚焦消色散透鏡可壓縮光束尺寸,從而在一個(gè)緊湊的測試暗箱里完成測試。測試原理與前面所述完全一樣,只是加入了一個(gè)透鏡來縮短測試距離,整體尺寸LxWxH:95cmx50cmx43cm。
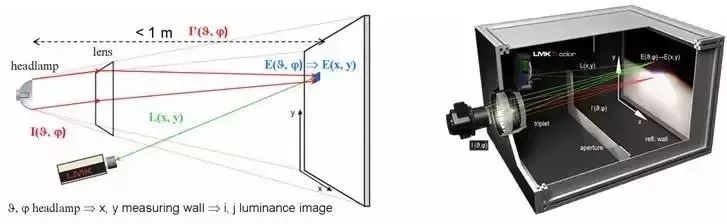
圖12:緊湊型測試暗箱原理示意圖
由于采用了暗箱,環(huán)境光造成的雜散光可以不計(jì)。該測試暗箱有兩個(gè)部分組成。測試空間部分,有一個(gè)反射屏以及一個(gè)光闌,另外一個(gè)空間,放置待測的前燈以及測試用的亮度計(jì)。該測試箱體也被用于光學(xué)透鏡的質(zhì)量監(jiān)控。
Matrix LED 像素亮度測量
大部分的矩陣LED大燈LED組件少,可以通過成像式亮度計(jì)進(jìn)行整體測量,進(jìn)行發(fā)光體識別,進(jìn)而得到亮度。而高解析度MatrixLED像素密度高、像素小,自動識別發(fā)光體已經(jīng)不太現(xiàn)實(shí),尤其是像素與像素之間沒有明顯的亮度區(qū)隔。
本測試使用樣品:MatrixLED像素?cái)?shù)量32X32,尺寸:4mmX4mm。
圖13:測試用MatrixLED實(shí)物
使用Labsoft圖像測試及處理軟件,通過設(shè)定Mask來實(shí)現(xiàn)對矩陣中的每個(gè)LED亮度測量。要保證每個(gè)像素的測試精度,需要多個(gè)像素對應(yīng)一個(gè)LED像素,因此需要高解析度相機(jī)以及遠(yuǎn)心鏡頭。本實(shí)驗(yàn)采用LMK5相機(jī)配合遠(yuǎn)心鏡頭進(jìn)行測試。
由于樣品與相機(jī)不可能出現(xiàn)理想的對準(zhǔn)情況,不可避免傾斜、偏轉(zhuǎn)。通過建立測試mask,將傾斜的圖像進(jìn)行坐標(biāo)變換,與Mask匹配,從而鎖定每個(gè)LED像素位置,進(jìn)而輸出得到各個(gè)像素的亮度。
圖14:原始亮度圖像圖15:32X32測試Mask圖16:修正后鎖定LED位置的亮度圖像
本文描述了快速配光測試技術(shù)以及高解析度MatrixLED的測量技術(shù),這兩種技術(shù)對于新型的汽車智能大燈測量具有獨(dú)特優(yōu)勢,對于新型智能燈具的研發(fā)、生產(chǎn)、質(zhì)量管理都有非常大的借鑒和使用價(jià)值。
-
led
+關(guān)注
關(guān)注
243文章
24596瀏覽量
690880 -
汽車照明
+關(guān)注
關(guān)注
5文章
314瀏覽量
30221 -
汽車大燈
+關(guān)注
關(guān)注
0文章
20瀏覽量
3176
原文標(biāo)題:技術(shù)丨用成像式亮度計(jì)對高解析度Matrix LED大燈測量的技術(shù)研究及實(shí)例
文章出處:【微信號:cnledw2013,微信公眾號:CNLED網(wǎng)】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
三大數(shù)據(jù)解析LED照明產(chǎn)業(yè)發(fā)展前景
2017 | OLED汽車照明發(fā)展大觀察
品佳推出英飛凌汽車LED大燈驅(qū)動方案
三通道高側(cè)恒流汽車線性LED控制器解決汽車照明問題
汽車前照明中的LED發(fā)展概述
汽車照明解決方案
汽車前照明中的LED介紹
LED汽車照明項(xiàng)目正式投產(chǎn)
汽車大燈的發(fā)展史是怎樣的?激光大燈是否能成為汽車照明的主流?
如何在汽車照明時(shí)代正確的選擇LED大燈產(chǎn)品?
賦能汽車照明系統(tǒng)的車用LED與驅(qū)動技術(shù)
【世說設(shè)計(jì)】高亮度矩陣式LED,讓汽車照明呈現(xiàn)更多可能

智能矩陣式LED汽車大燈

擎耀解碼奔馳LED矩陣大燈大燈技術(shù)方案及九大特點(diǎn)



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論