 工業機器人的邏輯編程教程資料說明
工業機器人的邏輯編程教程資料說明

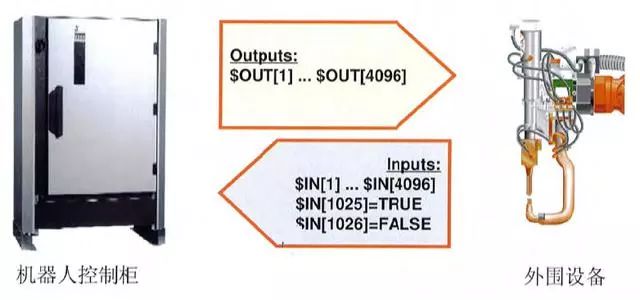
1、邏輯編程
輸入輸出的設置是為了機器人與外設設備的通信,例如工具傳感器等
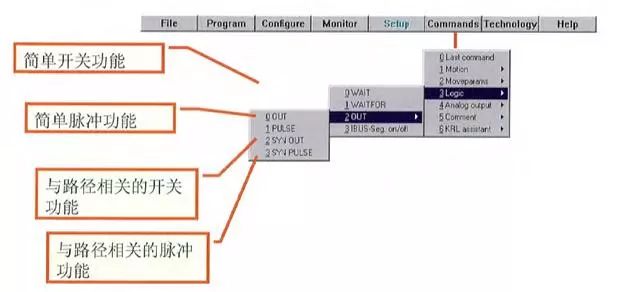
2、可用邏輯指令
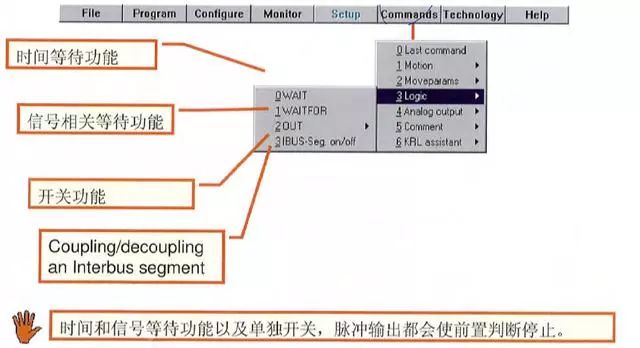
3、等待時間功能邏輯指令
(2)等待信號程序可用編寫,例如以下常用形式。
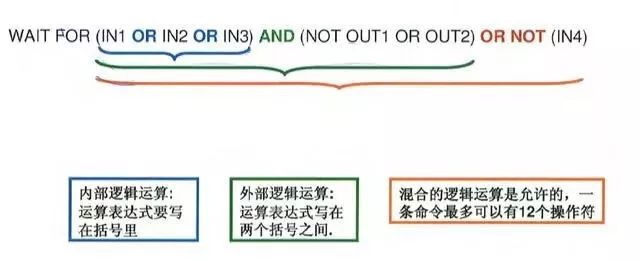
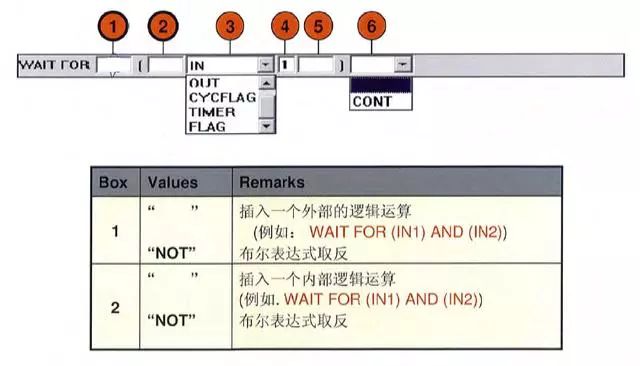
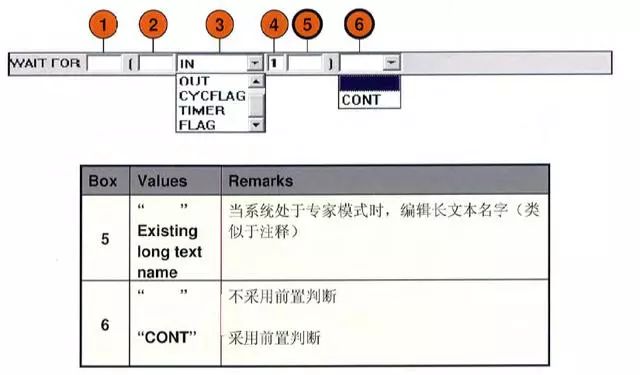
(3)如果“WAIT FOR”指令被選擇,你們下列參數可以被設置
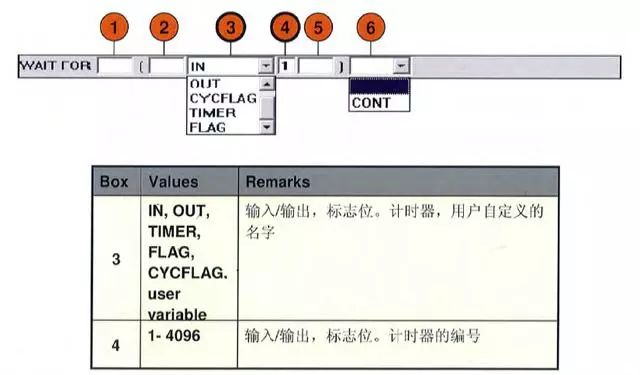
(4)如果“WAIT FOR”指令被選擇,你們下列參數可以被設置
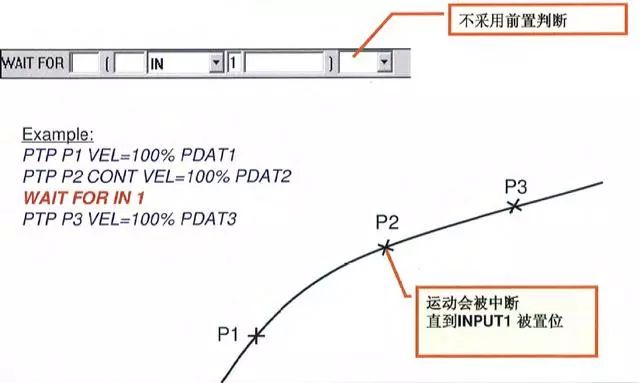
(5)如果“WAIT FOR”指令被采用打斷前置判斷的形式,每一個點都會精確達到即使條件已經滿足。
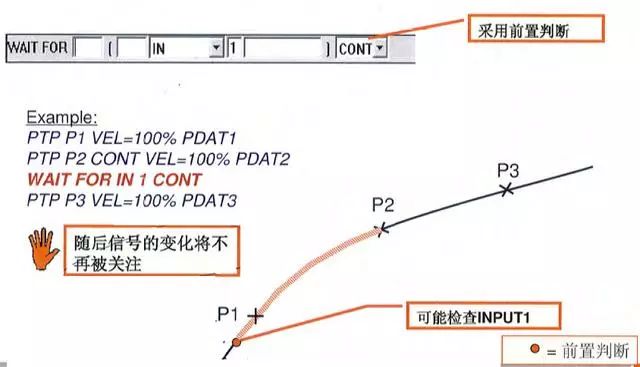
(6)如果“WAIT FOR”指令選擇CONT模式,你們條件將會被前置判斷,如果條件滿足,那么就會采用逼近方式。
4、輸出功能
(1)以下功能按選件可以被選擇
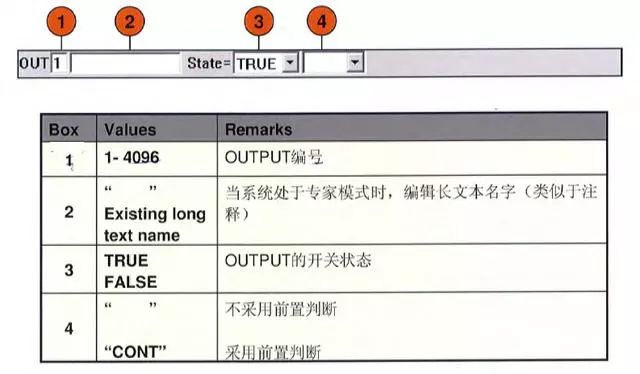
(2)簡單輸出指令一
如果“OUT"指令被選擇,那么以下參數可以設置
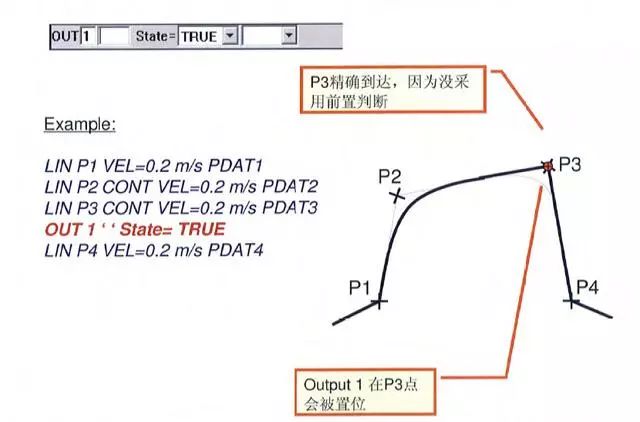
(3)簡單輸出指令二
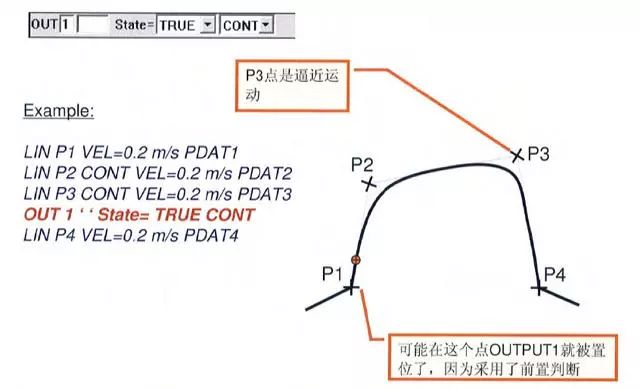
4)簡單輸出指令三
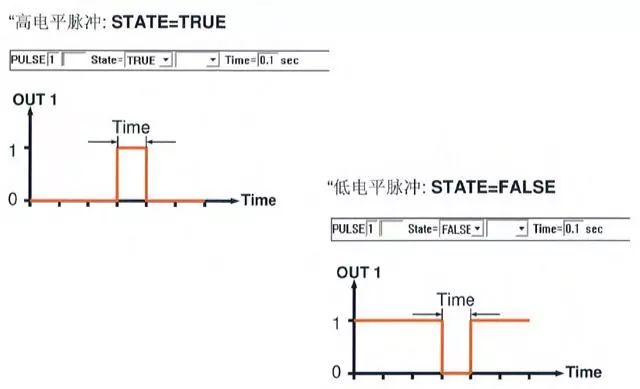
(5)、簡單脈沖指令一
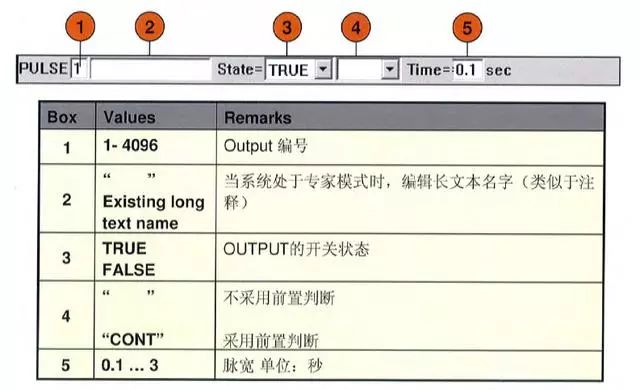
(6)簡單脈沖指令二
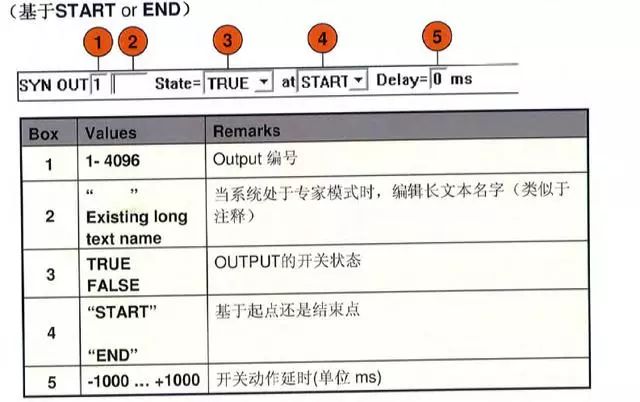
5、同步輸出指令
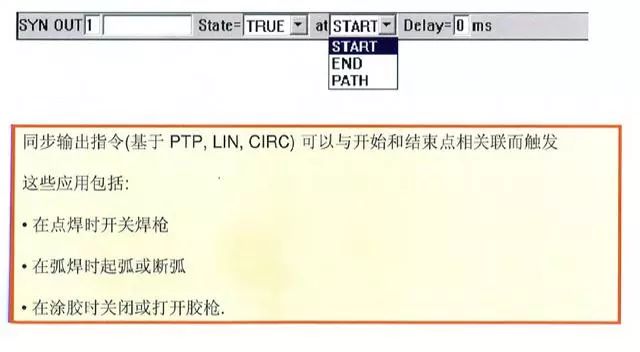
6、信號輸出
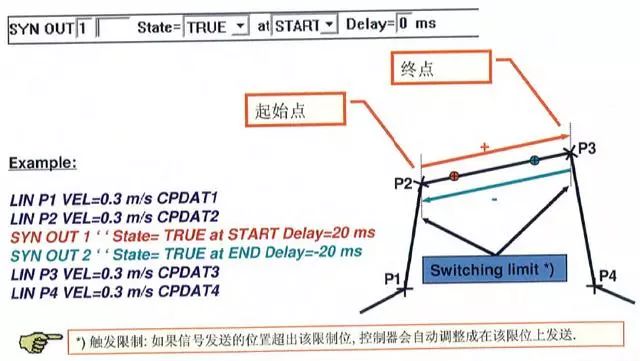
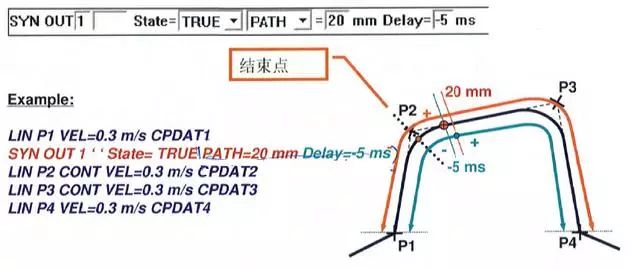
(1)在路徑開始或者結束處輸出信號一
如果"OUT"指令被選擇,那么以下的參數可以設置
(2)起始點和結束點都精確到達
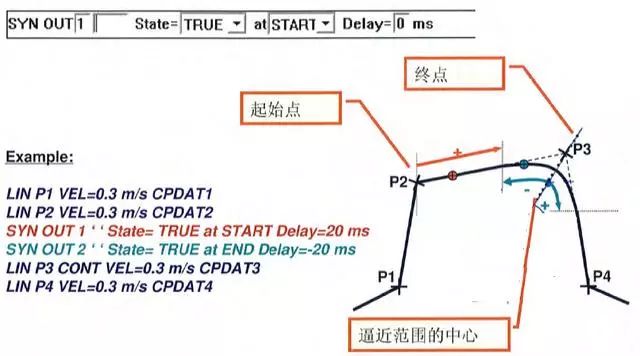
(3)起點精確到達點,終點是逼近點
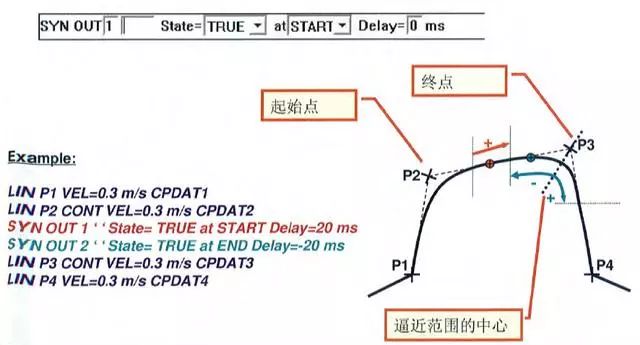
(4)起始點和結束點都逼近點
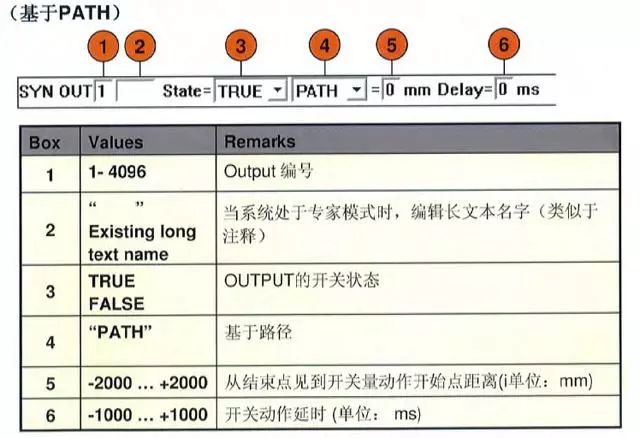
(5)在路徑如何位置輸出信號
a、如果你使用路徑相關的SYNOUT-PATH命令,你可以沿著程序路徑上的
知道距離的任意點觸發開關量。
b、和起始結束點相關同步指令一樣,這種指令也可以提前或者延遲發送
信號。
c、路徑相關的開關量控制只是被允許用在連續路徑運動中(LIN 或者 C
IRC)。
d、SYNOUT-PATH指令是針對下一個運動指令而言的。
e、如果一個SYNOUT-PATH命令運用于一個PTP運動,那么運動執行時會被
軟件拒絕。
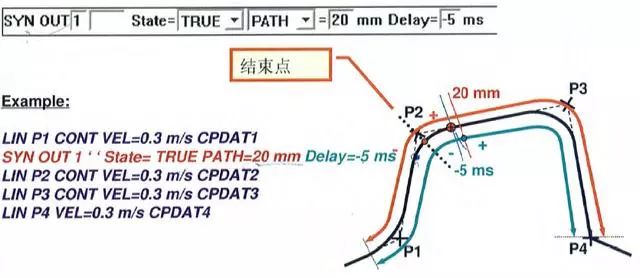
(6)路徑相關同步輸出指令一
如果“OUT”指令被選擇,那么以下參數可以設置
(7)路徑相關同步輸出指令二
起始點是精確到達點,終點是逼近點
(8)路徑相關同步輸出指令三
起始的和結束點都是逼近點
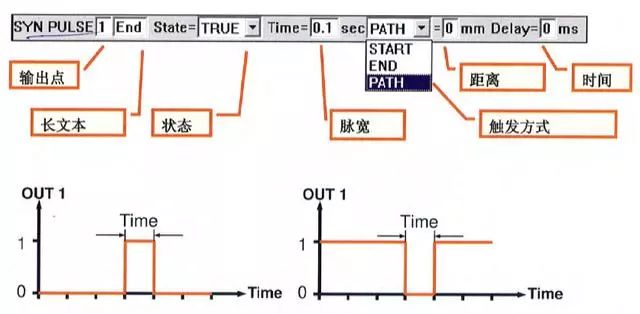
7、同步脈沖指令
如果“SYN PULSE”被選擇,那么以下參數可以設置
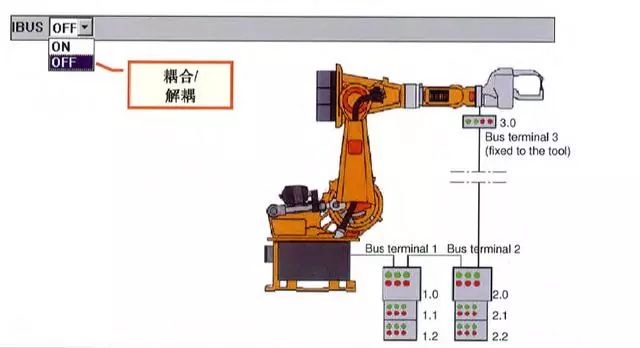
8、Inter bus 部分耦合和解耦
如果“IBUS-seg.on/off ”被選擇,那么以下參數可以設置
-
傳感器
+關注
關注
2576文章
55041瀏覽量
791329 -
編程
+關注
關注
90文章
3716瀏覽量
97186 -
工業機器人
+關注
關注
91文章
3534瀏覽量
98184
原文標題:工業機器人編程教程-邏輯編程
文章出處:【微信號:GKYXT1508,微信公眾號:工控云學堂】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄



 工商網監
工商網監
評論