") 研究人員已經(jīng)研發(fā)出一種可以自學走路的機器腿
研究人員已經(jīng)研發(fā)出一種可以自學走路的機器腿

Valero-Cuevas及其同事開發(fā)了一種由動物肌腱驅(qū)動的機器人腿,并由生物啟發(fā)的AI算法控制。這些使得機器人能夠通過“motor babbling ”或進行重復的探索運動來發(fā)展以類似于人類的方式行走的技能。
南卡羅來納大學(USC)的研究人員已經(jīng)研發(fā)出一種可以自學走路的機器腿。受到人類以及在出生后幾分鐘內(nèi)學會掌握技能的動物的啟發(fā),研究人員希望這項研究將在動態(tài)假肢和機器人領(lǐng)域開辟新的可能性,這些機器人可以在陌生的環(huán)境中即時學習。
“如今,機器人需要相當于數(shù)月或數(shù)年的培訓才能與世界互動,但我們希望實現(xiàn)自然界中的快速學習和適應(yīng),”該大學生物醫(yī)學工程系Francisco J. Valero-Cuevas教授表示。
為了實現(xiàn)這一目標,Valero-Cuevas及其同事開發(fā)了一種由動物肌腱驅(qū)動的機器人腿,并由生物啟發(fā)的AI算法控制。這些使得機器人能夠通過“motor babbling ”或進行重復的探索運動來發(fā)展以類似于人類的方式行走的技能。
“腿的這些隨機運動允許機器人建立其肢體的內(nèi)部圖及其與環(huán)境的相互作用,”該研究的作者、USC工程博士生Ali Marjaninejad表示。
通過自身了解其結(jié)構(gòu)和環(huán)境,機器人肢體可以開發(fā)自己的個性化步態(tài),并在僅僅五分鐘的“motor babbling” 之后學習新的步行任務(wù)。研究人員認為,這是第一個能夠?qū)崿F(xiàn)這一壯舉的機器人,并對提前開啟的可能性感到興奮。
正如他們所解釋的那樣,機器人可以被編程為在某些情況下執(zhí)行某些任務(wù),但是你無法為每種可能性做好準備。另一方面,這些能夠根據(jù)環(huán)境發(fā)展自己的個性化運動的機器人將能夠承擔更廣泛的任務(wù)。
“如果你讓這些機器人從相關(guān)經(jīng)驗中學習,那么它們最終會找到一個解決方案,一旦找到,將根據(jù)需要投入使用并進行調(diào)整,”Marjaninejad表示。“解決方案可能并不完美,但如果情況足夠好,將會采用。不是我們每個人都需要或想要 - 或者能夠花時間和精力 - 贏得奧運獎牌。”
響應(yīng)性假肢是這種技術(shù)可以產(chǎn)生影響的一個領(lǐng)域,通過允許更直觀、自然和自我改善的肢體來幫助殘疾人。太空探索可能是另一個領(lǐng)域,機器人可以放置在遙遠的天體上,并利用它們的學習能力來調(diào)整它們的步態(tài)并駕馭未知的地形。
“物種在身體和環(huán)境變化時學習和適應(yīng)運動的能力從一開始就是進化的強大動力,”博士生和研究作者Brian Cohn表示。“就像動物一樣,我們的工作是朝著增強機器人學習和適應(yīng)每種體驗邁出的一步。”
該研究發(fā)表在《Nature Machine Intelligence》雜志上。
-
機器人
+關(guān)注
關(guān)注
213文章
31097瀏覽量
222362 -
AI算法
+關(guān)注
關(guān)注
0文章
271瀏覽量
13154
原文標題:可以自學走路的機器腿,為動態(tài)假肢開辟新的可能性
文章出處:【微信號:worldofai,微信公眾號:worldofai】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
一種磁流變與油氣復合兩級緩沖系統(tǒng)在直升機自適應(yīng)起落架中的協(xié)同設(shè)計與落震性能研究

四川大學:研究一種具有四重感知能力的柔性機器人傳感器

研究人員復興針孔相機技術(shù)以推動下一代紅外成像發(fā)展
一種帶通濾波器在無位置傳感器轉(zhuǎn)子檢測中的應(yīng)用
無刷直流電機雙閉環(huán)串級控制系統(tǒng)仿真研究
RDK × 腿臂機器人:這只 “機械汪” 竟會說人話、走花路!

致真精密儀器高精度振動樣品磁強計TIM-70介紹

美國加州理工學院:研究量子傳感技術(shù)可實現(xiàn)粒子時空高精度探測
研究人員開發(fā)出基于NVIDIA技術(shù)的AI模型用于檢測瘧疾
NanoEdge AI Studio 面向STM32開發(fā)人員機器學習(ML)技術(shù)
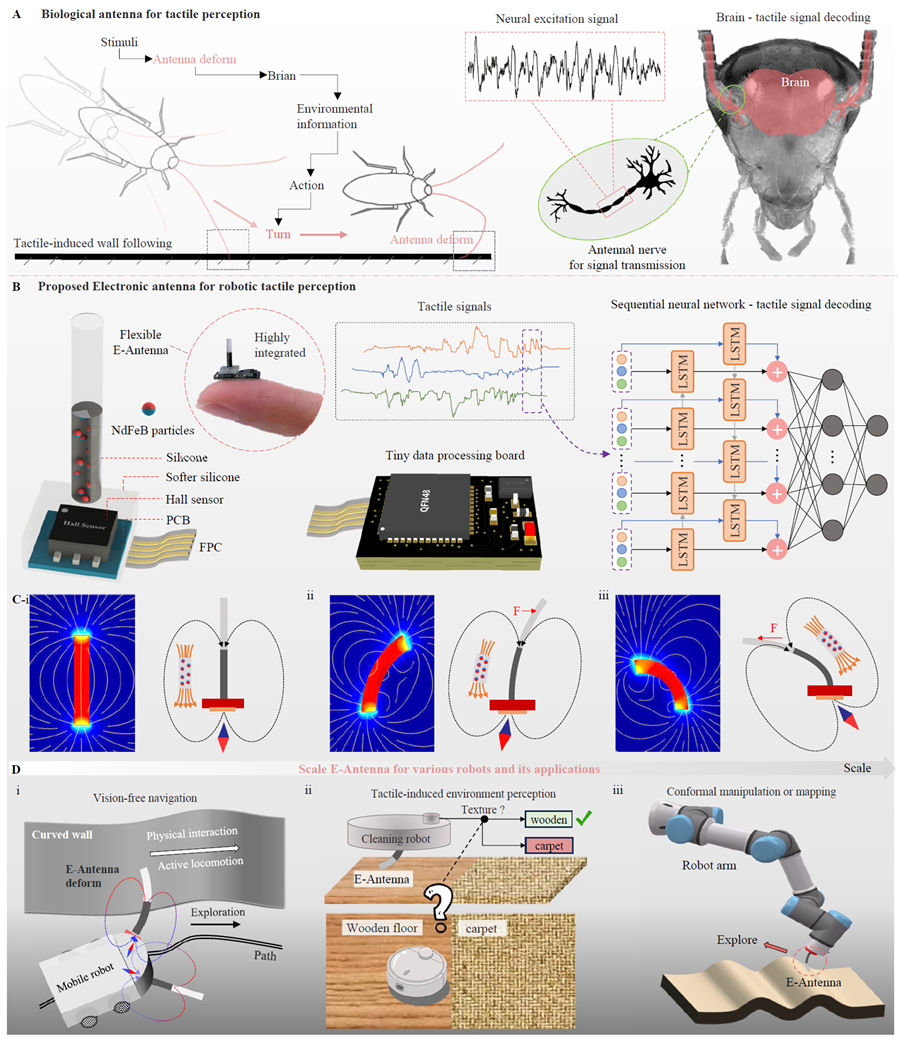
研制仿生電子觸角傳感器,突破無視覺環(huán)境感知瓶頸



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論