 美國交通部卡車自動駕駛相關研究
美國交通部卡車自動駕駛相關研究

美國交通部卡車自動駕駛相關研究如下:
卡車列隊行駛早期部署評估(2019-2021)
卡車列隊行駛對橋梁的影響(2018-2020)
為自動化CMV開發基準安全性能措施(2017-2019)
CMV自動化應用傳感器指南(2017-2019)
可行性研究:口岸與倉庫低速自動化卡車列隊行駛(2017 - 2018)
新興城市貨運概念(2019-2020)
卡車隊列行駛仿真模型改進(2019年)
協作式自動駕駛研究出行應用(*2018-2020)

協作式自動駕駛研究項目
協作式自動駕駛研究項目專注于交通干線和高速公路,目的在于安全地提高運作效率并且最大化美國城鄉道路通行能力。如降低交叉路口20%車輛的燃油消耗、節省10%的燃油以及使現有車道的通行能力加倍。

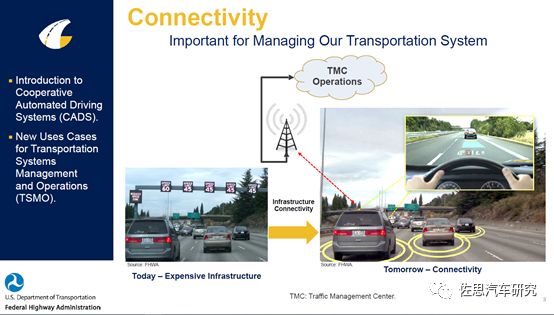
聯網對于管理交通系統十分重要。通過聯網,使當前造價昂貴的交通基礎設施轉變為簡單高效的互聯駕駛。
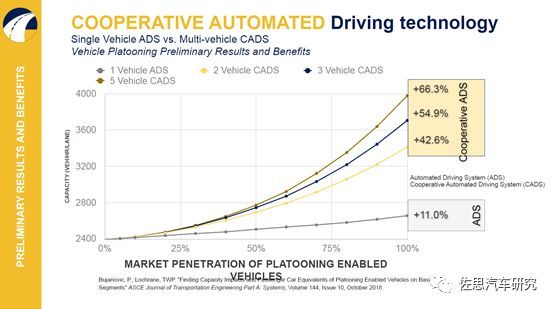
下圖是單車自動駕駛系統與多車協作式自動駕駛系統的對比。從圖中可以看出在市場滲透率相同的情況下,越多車輛的協作式自動駕駛系統,能夠帶來越高的道路通行能力。
本文中ADS指Automated Driving System 自動駕駛系統,CADS指 Cooperative Automated Driving System 協作式自動駕駛系統。TSMO指交通系統管理與運行(Transportation Systems Management and Operations)。
TSMO的策略如下:
工作區管理
交通事故管理
特殊事件管理
道路天氣管理
運輸管理
貨物管理
交通信號協調
出行者信息
CARMA指協作式駕駛出行應用研究項目(CARMA: Cooperative Automation Research Mobility Applications)。CARMA的演變歷程如下:
CARMA 1 (2014-2016):
概念的初步印證
個體應用收集
在MicroAutobox上運行Simulink/dSpace
演示多個應用:
1)開發列隊算法
2)改進EAD(eco-approach and Departure)算法
3)改進速度協調算法
4)改進變道合并算法
CARMA 2 (2016-2018):
SAE L1級自動駕駛(速度控制),可進行L2級
基于ROS
靈活性:可以安裝于各種類別的車型上
接受應用于研究的第三方插件 (指導算法)
包括簡單的應用:
1)運用ACC
2)協作式變道
3)混合隊列行駛
4)交叉口信號控制
5)速度協調
CARMA 3 (2018-2020):
SAE L2級自動駕駛(速度和轉向控制),可進行L3級
更復雜的協作列表,譬如V2V
增強的變道合并編排
增強的列隊行駛(轎車與卡車)
強調TSMO的基礎設施交互(工作區、交通事故管理、天氣等)
應急車輛應用與交互
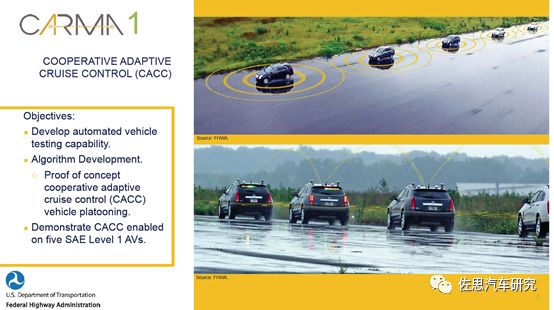
CARMA 階段1:協作式自適應巡航
CARMA 階段1的目標如下:
發展自動化車輛測試能力
算法發展(協作式自適應巡航車輛列隊行駛概念的印證)
演示在5臺 SAE L1 自動駕駛車輛上啟用CACC(協作式自適應巡航)
CARMA 階段2:集成化高速公路原型
CARMA 階段2目標如下:
新的CARMA 2研究平臺(開放資源)
算法發展(開放資源)
1)速度協調
2)車輛列隊行駛
3)協作式車道變更
4)協作式坡道合并
5)交叉口信號控制駛入和離開

CARMA 2的研究重點:
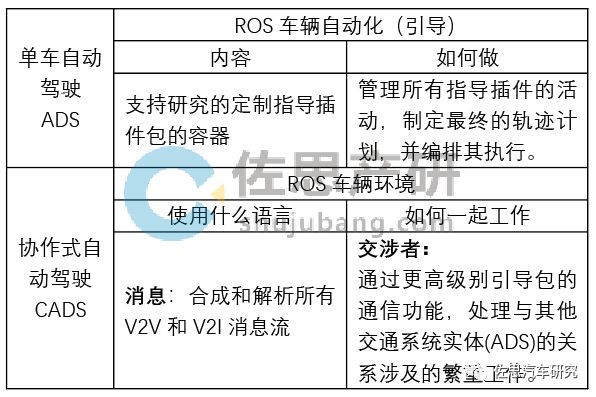

協作式自動駕駛研究的算法概述如下:
速度協調(受云端控制的速度控制)
車輛列隊行駛(引領者-跟隨者)
協作式車道變更(V2V交涉)
協作式坡道合并(V2I交涉)
進入與駛離 (交叉路口多信號控制)
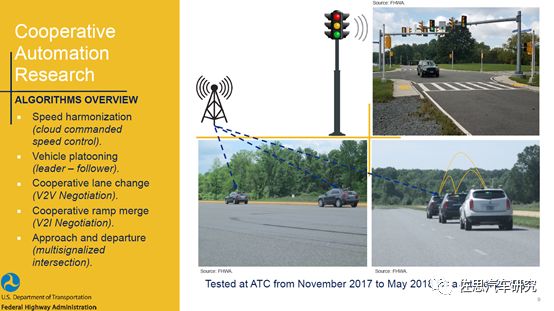
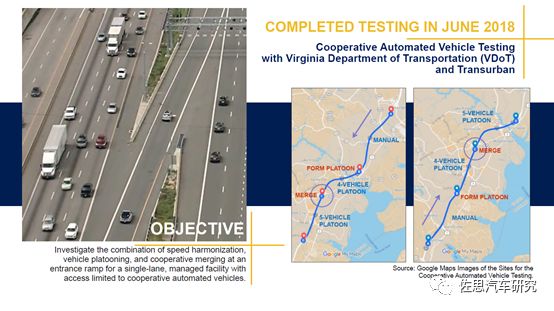
與佛吉尼亞交通部以及Transurban于2018年6月完成協助式自動駕駛汽車完整的測試,該測試的目的在于研究速度協調的組合、車輛列隊行駛、在單車道的坡道入口處的協作式合并,以及管理協作式自動駕駛汽車的專用設施。
濕滑道路測試計劃于2018年10月/11月進行。
引導算法升級包括:
1)單一車輛穿越多個交叉路口
2)在交叉路口隊列中容納一個未聯網的車輛
3)集成隊列車流量的基礎設施感知
在TFHRC和FLETC進行驗證測試

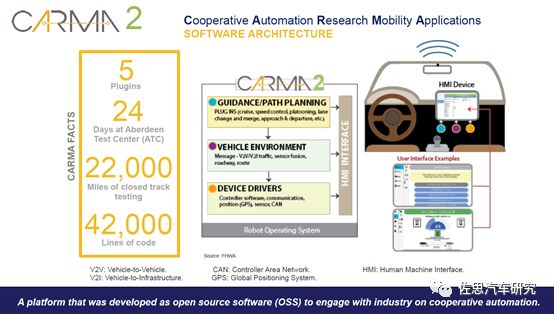
CARMA2協作式自動駕駛研究出行應用的軟件架構
CARMA 2運用5個插件和42000行代碼完成了在亞伯丁測試中心24天共22000英里的封閉道路測試。通過機器人操作,實現人機交互界面(HMI)顯示相關駕駛信息。CARMA 2的ROS系統包括了指導/路徑規劃插件、車輛環境信息(V2V/V2I交通、傳感器融合等)以及設備驅動等。作為開放源碼軟件(OSS)開發的一個平臺,用于與行業進行協作化自動駕駛研究。
CARMA 3 美國交通部多種模式的合作關系
CARMA 3階段主要與美國聯邦高速公路管理局、美國聯邦汽車運輸安全管理局、智能交通系統聯合規劃辦公室以及Volpe國家運輸系統中心合作,完成協作式自動駕駛、交通管理、標準、合作、公共安全、貨運以及數據等工作。

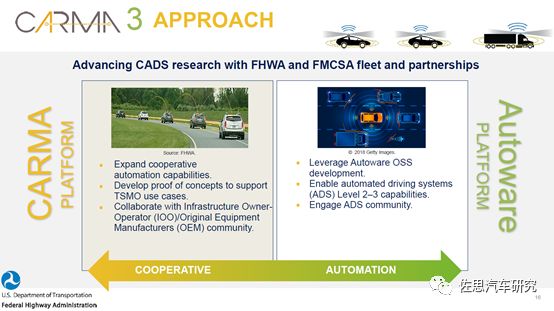
CARMA 3的方法:

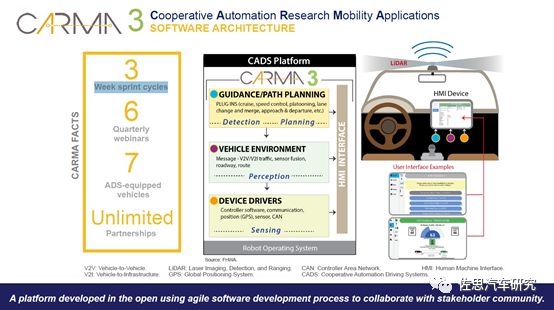
CARMA 3軟件架構
CARMA 3由3個沖刺周期、6個季度性在線研討會、7輛配備ADS的車輛以及無限多個合作伙伴完成。通過ROS系統實現人機交互界面(HMI)顯示相關駕駛信息。運用ROS系統以及LIDAR完成相應的任務。CARMA 3作為在開放式環境下開發出來的平臺,運用敏捷的軟件開發過程以與相關的利益團體進行合作。
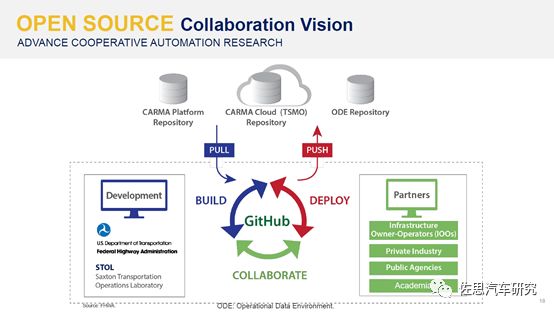
開放資源合作愿景:提升協作式自動駕駛研究
美國交通部、 Saxton交通運行實驗室等研發部門與基礎設施運營商、私人企業、公共代理機構以及學術界等合作伙伴利用GitHub開源項目托管平臺進行共同合作、構建及部署相關資源。
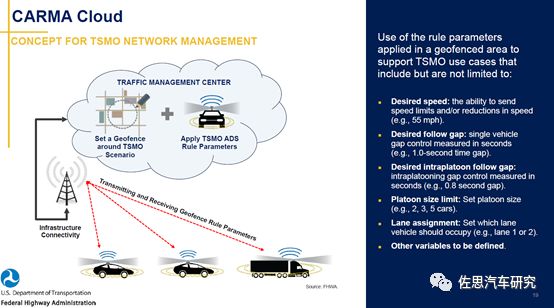
CARMA云
CARMA云是TSMO網絡管理的概念,利用在地理圍欄內應用的規則參數來支持TSMO應用案例,其包括但不限于:
理想的速度:發送限速信息或者減速信息的能力(例如55英里每小時)
理想的跟車距離:以秒為單位的單車間隙控制(例如1.0秒時間間隔)
理想的隊列內部跟車距離:以秒為單位的隊列內部間隙控制(例如0.8秒時間間隔)
隊列規格限制:設置隊列規格(例如2、3、5輛車)
車道分配:設置車輛應該占據哪一條車道
其他變量有待定義
ADS能力:TSMO應用案例發展
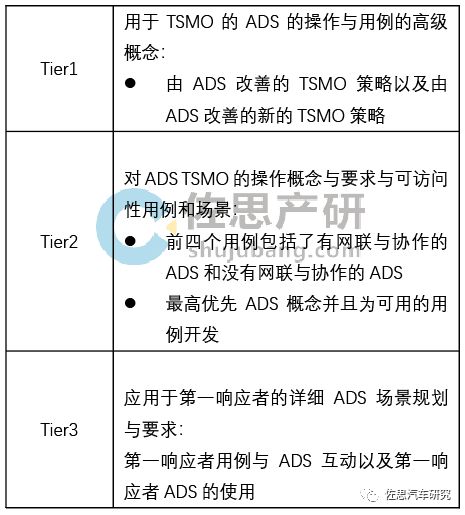
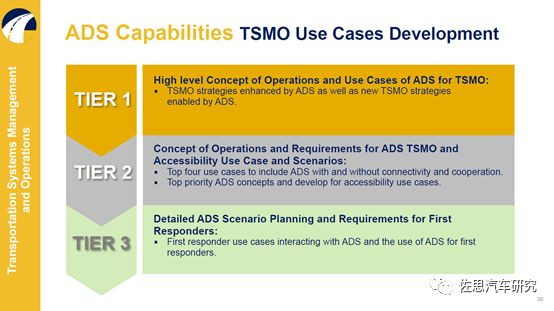
協作式自動駕駛應用場合


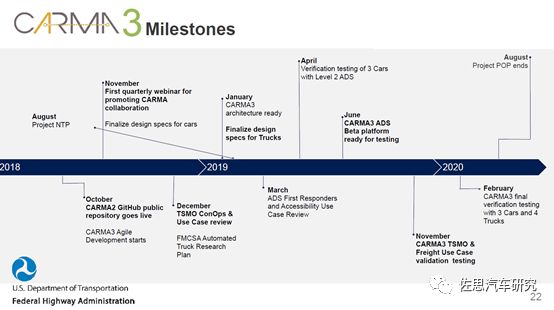
CARMA3里程碑
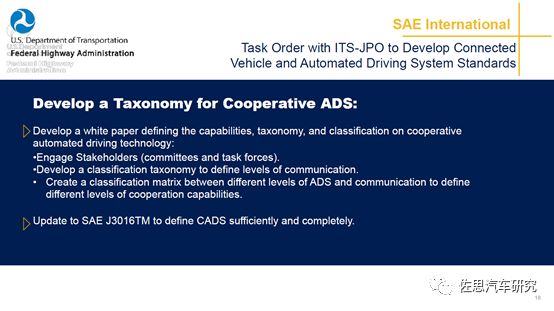
SAE國際 與ITS-JPO合作開發聯網車輛和自動駕駛系統標準,為協作式自動駕駛開發一個分類法
開發一個白皮書來定義協作自動駕駛技術的功能、類別和分類
1)吸引利益相關者(委員會與工作組)
2)開發一個分類法來定義通訊的等級
3)在不同ADS和通訊等級之間建立一個分類矩陣以定義合作能力的不同級別
更新至 SAE J3016TM以充分且完整定義CADS
-
交通系統
+關注
關注
0文章
31瀏覽量
7772 -
自動駕駛
+關注
關注
793文章
14884瀏覽量
179918
原文標題:美國交通部:協作式自動駕駛系統研究
文章出處:【微信號:zuosiqiche,微信公眾號:佐思汽車研究】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
自動駕駛汽車如何實現自動駕駛

2026年自動駕駛汽車發展趨勢前瞻

小馬智行與三一重卡及東風柳汽聯合打造第四代自動駕駛卡車
主線科技深度參與成渝公路班列自動駕駛卡車編隊項目
韓國交通部部長一行參訪小馬智行
新加坡傳來喜訊!文遠知行攜手Grab推出Ai.R自動駕駛服務項目

自動駕駛公司小馬智行進入新加坡市場
新加坡交通部代表團參訪小馬智行廣州研發中心
自動駕駛汽車是如何準確定位的?

卡車、礦車的自動駕駛和乘用車的自動駕駛在技術要求上有何不同?

自動駕駛安全基石:ODD
新能源車軟件單元測試深度解析:自動駕駛系統視角




 工商網監
工商網監
評論