 基于無人機傾斜攝影建模方式進行大比例尺數字測圖
基于無人機傾斜攝影建模方式進行大比例尺數字測圖

一、項目概述
目前農村地籍調查的主流做法主要是參考大比例尺地形圖、高分辨率無人機影像,運用全球定位系統、全站儀采用數字地籍測量技術和方法開展大比例尺土地權屬調查和地籍測繪,獲取界址點的房角點、墻角點的坐標。
隨著傾斜攝影技術的快速發展,如何利用建立的實景三維模型生產大比例尺地形圖(1:500)、進一步拓展成果應用領域如地籍測量等成為行業要探索的一個問題。我單位決定聯合深圳飛馬機器人科技有限公司對和碩縣清水河農場進行一個小范圍的低空高分辨率傾斜攝影建模與地籍測圖生產試驗,目的是為了驗證D200+D-OP300(5*A6000)傾斜測量模型精度,為單位進一步展開今后的地籍測量、不動產測繪、大比例尺地形圖測繪提供新的技術手段。
二、測區概況
測區位于新疆和碩縣清水河農場,測區位于和碩縣縣城以南,地勢平坦,交通便利,測區面積0.364km2,主要為低層規則建筑,地物特征明顯。
圖1 測區谷歌影像圖
三、航線規劃
D200+D-OP300(5*A6000)傾斜數據按照1.4cm分辨率(下視鏡頭),航向80%、旁向70%設計、飛行高度89m、航線間距25米,拍照間距11米,空速8米/秒、設計里程30.5km,飛行2個架次,航線示意圖如下:
圖2 D200五相機傾斜航線
四、像控點及檢查點布設方案
4.1 控制點方案設計
測區按照平均間距150米布設像控點,控制點盡量選取空曠無遮擋的地方,像控點分布位置示意圖見下圖:
圖3 像控點分布位置示意圖
4.2 像控點靶標設計
靶標按照矩形設計(如下圖),用白色或紅色乳膠漆刷在地面硬質石頭或路面上,靶標尺寸為60cm*60cm。
圖4 靶標設計
4.3 像控點和檢查點的測量
4.3.1 像控點
像控點采用RTK進行測量,基準站設置和航飛基站采用同一個,測量全部使用腳架進行對中整平測量,測量位置需在靶標的幾何中心位置,并做好點之記。
圖5 像控點的測量
4.3.2 檢查點
傾斜模型平面精度檢查點,選取地面上的明顯地物(如:馬路標線等地物)使用RTK進行測量,帶房檐的房屋使用全站儀進行測量,高程精度檢查選取路面、水泥地面等平整的地面使用RTK進行測量。
五、組織實施
5.1 人員投入
飛行技術人員2人,外業測量人員2人,內業編輯人員3人。
5.2 航攝設備
本項目采用旋翼無人機進行低空數據采集,利用多個起降架次完成測區傾斜攝影測量數據的覆蓋。

表1 航攝設備情況表
5.3 實景三維建模軟硬件
數據處理采用ContextCapture Center Master軟件(以下CCC)軟件進行傾斜航空影像數據處理,生產實景三維模型。以下為建模所用硬件配置表:

表2 硬件環境配置表
5.4 大比例尺測圖軟件
本次測試基于實景三維模型數據,使用EPS2016大比例尺測圖軟件,進行點、線、面等矢量信息采集,提取地面要素輪廓,并獲取矢量數據。
5.5 其他作業設備
作業用車輛,GPS、全站儀、筆記本圖形工作站等。
5.6 取得成果
實景三維模型一套(數據格式為OSGB);
六、項目實施技術路線
項目實施分為數據采集、ContextCaptureCenter Master數據處理和EPS2016測圖三個階段,并對成果進行精度檢測。
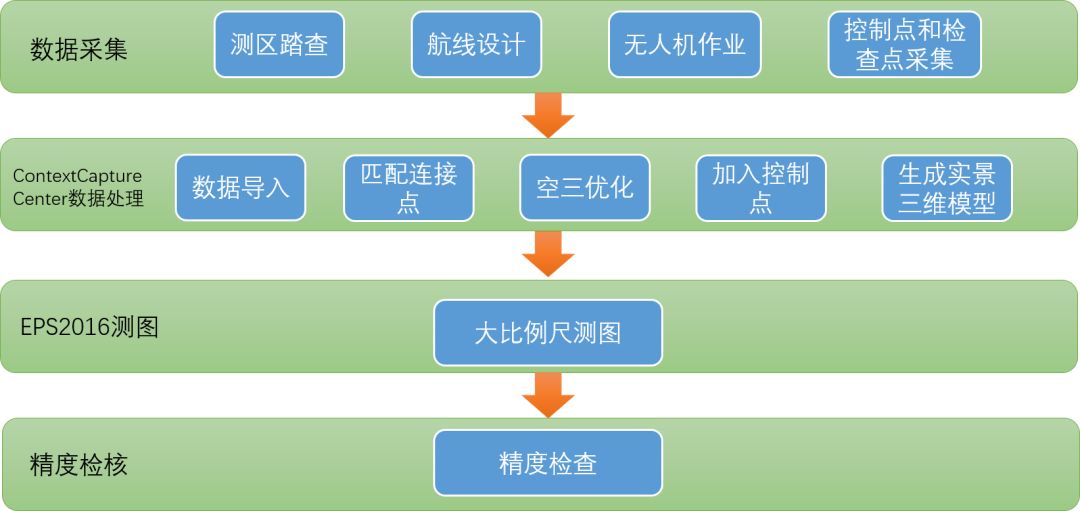
圖6 項目技術路線圖
七、工作實施情況
7.1 航攝參數及航飛情況
此次航飛的總體技術情況如下表所示:

表3 航飛總體情況技術表
7.2 數據空三處理
測區共獲取了12665張原片,在ccc軟件中處理空三速度較慢,本次數據處理將測區劃分為2個區塊分別進行空三處理,最后對模型進行合并。
7.3 實景三維模型生產
將空三成果導入CCC工作流,通過劃分模型格網,采用10組計算機同步生產模型數據。經過像對匹配、形成格網、設定格網大小、自動貼圖、坐標轉換、模型合并等流程,生產出測區的實景三維模型成果(OSGB格式),容量為19.9G,詳細如下:
圖7 測區實景三維模型成果
圖8 模型細節圖
7.4 大比例尺測圖
項目區測圖采用EPS2016測圖軟件對生成實景三維模型(OSGB格式)轉化為DSM格式數據進行導入,本次測試采集有房檐的房屋,采用五點房交會法和直接從模型采集房角方法分別獲取房角點的平面坐標,高程精度檢查使用模型直接進行采集。為了避免測圖人為原因產生的誤差,測圖分別由兩個作業員單獨完成,并進行精度比對。
圖9 EPS2016軟件中進行測圖
7.5 精度檢測
實景三維模型生產完畢后,使用RTK采集的平面和高程檢查點點作為模型檢核點,使用全站儀采集的有房檐的房屋房角點進行模型絕對精度檢測,精度驗證表詳情見附表。

八、總結
本項目采用測繪領域最新的傾斜攝影測量技術,充分利用傾斜攝影的自動化空三與建模優勢,在較短的時間內生產出了高質量、高精度的模型成果,并在此基礎上進行了大比例尺數字測圖,技術路線可行,產品精度符合農村地籍調查界址點精度相關標準規范要求,可應用于農村土地確權、不動產測繪等領域。將大部分野外測繪的測圖工作轉變為了內業工作,可大量減少外業人員的工作強度,提高了工作效率。就本次項目遇到的問題和總結如下:
1、本次測試范圍較小僅有0.36平方公里,由于鏡頭、電池等硬件能力所限,要達到0.05米以上測圖精度,飛行高度低,航片數量大,像控點數量多,建模效率較低;
2、由于原片數量大,重疊率高,像控點數量多,在空三處理過程中,在軟件中人工添加像控的工作量巨大。如果能把重疊飛至航向70%、旁向70%,原片數量可減少四分之一左右,模型質量、精度、像控點的布設方案還有待研究,需要進行進一步地測試;
3、遮擋問題,由于傾斜鏡頭與下視鏡頭呈45°夾角,因此拍攝時樹冠的冠幅會遮擋部分地面要素,影響測圖判讀。因此較適合在秋冬季落葉后或植被較稀疏地帶的完成測圖任務;
4、內業測圖過程中不同的作業人員采集的精度也是有差別的,作業人員的作業水平還有待提高;
5、EPS2016中測圖,使用五點房交會法測出的房屋角點和直接從模型上采集的房角點精度區別較大,經分析在EPS中使用五點房采集房屋時,軟件會自動將房屋全部直角化,這可能會帶來誤差。在建模質量較高區域,反而在模型上直接拾取房角點精度較高。
本次測試基于無人機傾斜攝影建模方式進行大比例尺數字測圖,技術路線可行,試驗精度滿足1:500大比例尺測圖精度要求,可應用于農村土地確權、不動產測繪等領域。今后的工作應進一步完善與優化大比例尺測圖整體解決方案,細化工作流程。
-
高精度
+關注
關注
1文章
802瀏覽量
27072 -
無人機
+關注
關注
236文章
11300瀏覽量
195666 -
攝影技術
+關注
關注
0文章
12瀏覽量
6523
原文標題:飛馬D200低空高分辨率傾斜攝影測量在巴州農村地籍調查中的技術研究
文章出處:【微信號:feimarobotics2015,微信公眾號:飛馬機器人】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
光伏電站無人機巡檢系統技術解析
無人機智能巡檢系統的技術特點與應用優勢
無人機Wifi圖傳模塊APP應用 RTL8189模塊測評
離軸技術:賦能無人機精準配送的核心芯片應用
無人機航測三維建模遇難題?索尼FCB-EV9520L來破局!
科普|無人機反制槍介紹

用樹莓派打造無人機,你需注意的事項!

低空物流:無人機開啟未來配送新篇章
石英晶振在無人機領域的應用

晶振化身空中交警,為無人機飛行保駕護航




 工商網監
工商網監
評論