") 基于三維模型進(jìn)行輸電線路設(shè)計(jì)
基于三維模型進(jìn)行輸電線路設(shè)計(jì)

一、項(xiàng)目背景
數(shù)字化三維設(shè)計(jì)是新一代智能設(shè)計(jì)平臺的基礎(chǔ),目前我國各行各業(yè)均廣泛、深入的應(yīng)用三維設(shè)計(jì)技術(shù)。2017年開始,國家電網(wǎng)公司與南方電網(wǎng)公司共同力推數(shù)字化三維設(shè)計(jì)技術(shù)在電力工程中全面應(yīng)用。未來,以三維設(shè)計(jì)為核心的數(shù)字化設(shè)計(jì),將成為貫穿電力工程全過程、全生命周期的主軸線。
無人機(jī)中、低空數(shù)據(jù)采集技術(shù)作為空間數(shù)據(jù)獲取的一項(xiàng)重要手段,具有續(xù)航時(shí)間長、飛行成本低、數(shù)據(jù)分辨率高、調(diào)度機(jī)動(dòng)靈活等優(yōu)點(diǎn),可實(shí)現(xiàn)數(shù)據(jù)實(shí)時(shí)傳輸,并可進(jìn)入高危地區(qū)探測,是衛(wèi)星遙感與傳統(tǒng)航空攝影測量的有力補(bǔ)充。[1]
本文利用飛馬智能航測系統(tǒng)進(jìn)行航空攝影測量,采集擬建輸電線路走廊影像數(shù)據(jù),制作實(shí)景三維模型,并導(dǎo)入三維設(shè)計(jì)平臺中[1]。基于三維模型進(jìn)行輸電線路設(shè)計(jì),將極大提高設(shè)計(jì)可視化程度,并能精確量測地物與線路的空間距離,優(yōu)化線路路徑。
1.1無人機(jī)航測系統(tǒng)
本文采用飛馬D1000智能航測系統(tǒng),D1000是飛馬機(jī)器人推出的一款基于旋翼無人機(jī)平臺的一體化智能航測系統(tǒng);系統(tǒng)基于無人機(jī)管家iPad版,支持正射、條帶、傾斜、環(huán)繞、全景多種作業(yè)模式的專業(yè)航線設(shè)計(jì)與全自動(dòng)飛行控制功能;整合無人機(jī)管家專業(yè)版軟件,在其穩(wěn)健的空三解算、控制點(diǎn)測量、一鍵成圖等支持下,針對旋翼相機(jī)優(yōu)化算法,實(shí)現(xiàn)大比例尺精度應(yīng)用,并提供DSM、真正射、三維模型等多種成果。
1.2工程概況
邢西~臨泉π入龍泉220kV線路工程位于太行山東部丘陵地區(qū),起自新建龍泉220kV變電站,止于邢西~臨泉220kV線路東、西破口點(diǎn),形成龍泉~邢西220kV線路和龍泉~臨泉220kV線路。
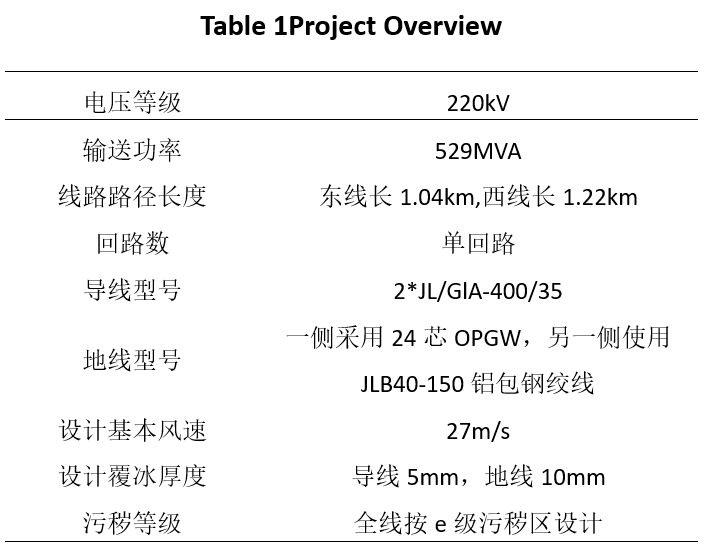
表1 工程概況
Table1Project Overview
二、技術(shù)路線圖
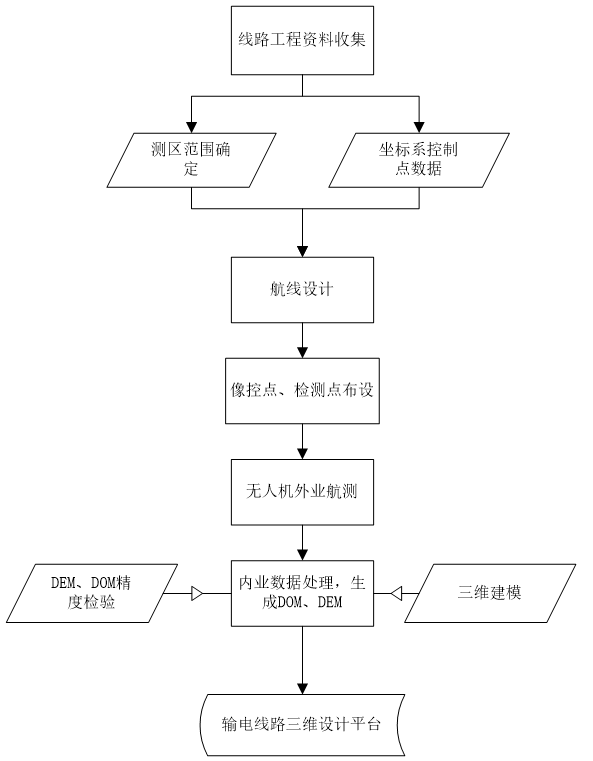
三、作業(yè)流程
3.1航線設(shè)計(jì)
針對本工程線路走向,為完全覆蓋兩條線路兩側(cè)各100m的線路走廊區(qū)域,測區(qū)宜設(shè)計(jì)為多邊形,如圖1所示。最低點(diǎn)高程279m,最高點(diǎn)高程308m,經(jīng)計(jì)算得到測區(qū)平均高程為292m。根據(jù)規(guī)范要求,當(dāng)航攝比例尺大于或等于1:7000時(shí),測區(qū)內(nèi)的地形高差一般不大于1/6相對航高,航攝設(shè)計(jì)指標(biāo)如表1所示。
圖1 航線布設(shè)圖
Fig. 1 Route layout
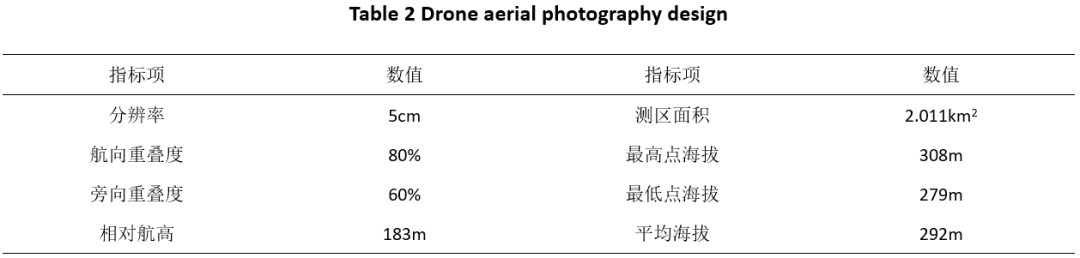
表2 無人機(jī)航攝設(shè)計(jì)
Table 2 Drone aerial photography design
3.2像控點(diǎn)布設(shè)
由于本工程設(shè)計(jì)采用的坐標(biāo)系為西安80,而無人機(jī)航攝系統(tǒng)自帶坐標(biāo)系為WGS84,故需要布設(shè)像控點(diǎn)轉(zhuǎn)換坐標(biāo)系。像控點(diǎn)的精度和數(shù)量直接影響到航測數(shù)據(jù)后處理的精度,所以像控點(diǎn)的布設(shè)和選擇應(yīng)當(dāng)盡量規(guī)范、嚴(yán)格、精確。本次像控點(diǎn)布設(shè)采用噴漆法布設(shè)像控點(diǎn)7個(gè),并使用GPS采集點(diǎn)坐標(biāo)數(shù)據(jù)(西安80)。像控點(diǎn)分布如圖2所示。
圖2 像控點(diǎn)分布圖(藍(lán)線為線路走向)
Fig. 2 control point distribution map (blue line isthe line direction)
四、輸電線路走廊實(shí)景建模
利用航空影像數(shù)據(jù)為數(shù)據(jù)源,采用影像匹配彩色點(diǎn)云數(shù)據(jù)技術(shù)和三維網(wǎng)格優(yōu)化算法,實(shí)現(xiàn)自動(dòng)三維建模、紋理映射、連接點(diǎn)重構(gòu)紋理和重建約束,建立輸電線路走廊三維模型[3]。
4.1 三維建模流程
使用航攝影像處理軟件,對采集的航攝相片進(jìn)行預(yù)處理,對影像進(jìn)行勻光和降噪。之后根據(jù)影像的航向和旁向重疊數(shù)據(jù),將相片拼接為整副影像。利用無人機(jī)航飛拍攝的POS數(shù)據(jù)與地面像控點(diǎn)坐標(biāo),進(jìn)行空三校正,將影像坐標(biāo)系由WGS84轉(zhuǎn)為本工程所需的西安80坐標(biāo)系。最后通過影像匹配點(diǎn)云,TIN三角建模及紋理貼附,生成三維影像模型,如圖3所示。
(a)影像匹配點(diǎn)云
(b)構(gòu)建數(shù)字地表模型
(c)自動(dòng)紋理貼圖
圖3 輸電線路走廊實(shí)景建模過程
Fig. 3 Transmission line corridor real-time modelingprocess
至此,三維實(shí)景模型中的地物只有空間信息,沒有屬性信息。因此,需要賦予道路、樹木、房屋、交跨線等地物屬性信息,從而可以在線路選線過程中實(shí)現(xiàn)空間距離量算。
圖4 交跨地物信息標(biāo)繪
Fig. 4 Cross-land feature information plotting
4.2 三維模型精度分析
本工程在航飛前,采集了輸電線路5基塔塔位作為航飛精度檢測點(diǎn)。像控點(diǎn)校正方面,中誤差在±0.01m。經(jīng)檢測點(diǎn)檢測結(jié)果對比,三維模型中平面中誤差在±0.05~0.1m之間,高程中誤差在±0.1~0.2m之間。根據(jù)《220kV及以下架空送電線路勘測技術(shù)規(guī)程》要求,本次測量精度滿足設(shè)計(jì)深度規(guī)定。
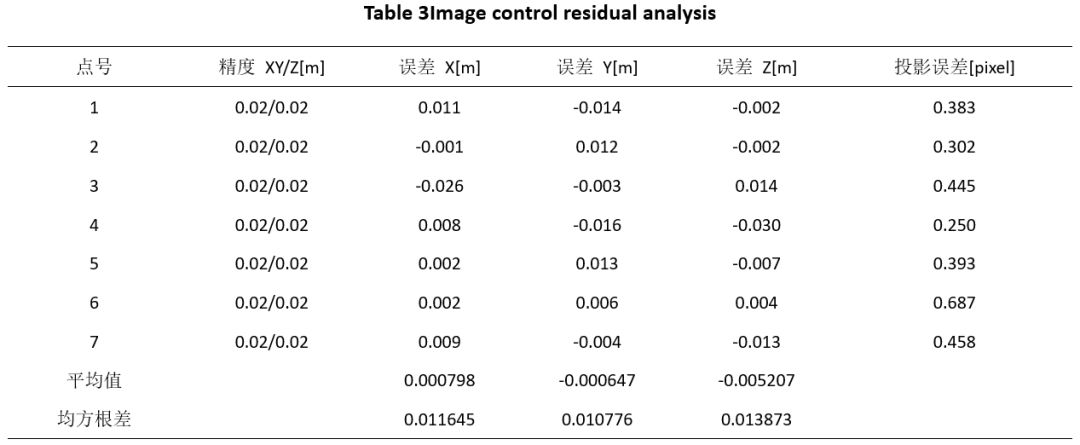
表3 像控點(diǎn)殘差分析
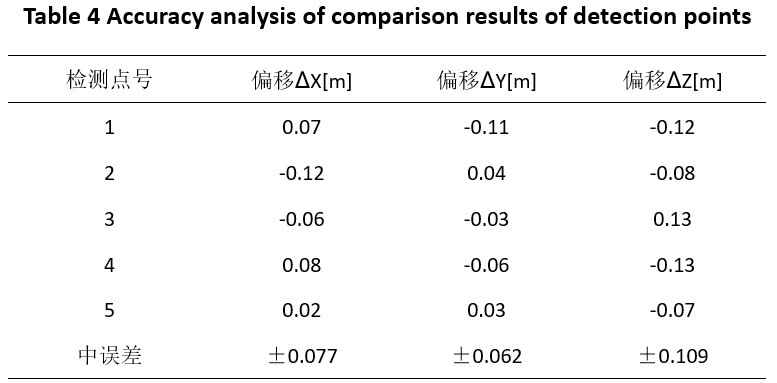
表4 檢測點(diǎn)對比結(jié)果精度分析
五、工程應(yīng)用與精度分
5.1地物標(biāo)繪精度比對分析
由于本工程在開展三維設(shè)計(jì)之前,已完成全線祥測工作。因此,將人工測量成果中的樹木、道路、房屋等交跨地物與三維模型進(jìn)行比對分析,即可得出三維模型中地物標(biāo)繪的精度。
(a)已有塔基位置對比
(b)房屋標(biāo)繪位置對比
(c)道路標(biāo)繪位置對比
圖5 地物標(biāo)繪對比(紅色為實(shí)測數(shù)據(jù))

將三維模型中標(biāo)繪的地物與實(shí)測數(shù)據(jù)對比,如圖5所示,比對結(jié)果如表5所示。由此可以看出,除無法識別的地物外,考慮兩種測量方式存在對地物邊界定義不完全一致的因素,可以認(rèn)為三維模型中的地物精度能夠滿足初設(shè)要求。
5.2空間距離量算
在三維場景中,基于BIM技術(shù)對輸電線路的塔、線、串進(jìn)行三維建模,可以真實(shí)模擬輸電線路走廊場景,如圖6所示。依據(jù)《110kV~750kV架空輸電線路設(shè)計(jì)規(guī)范》中對于220kV架空輸電線路的安全距離規(guī)定(表4),便可以對輸電線路走廊內(nèi)的交跨地物進(jìn)行空間距離量測,對輸電線路走廊內(nèi)的居民地、建筑、樹木等交叉跨越物進(jìn)行精確的空間距離量測,并對不滿足安全距離的區(qū)段進(jìn)行報(bào)警提示,如圖7所示。
圖6 三維場景中的塔、線、串模型
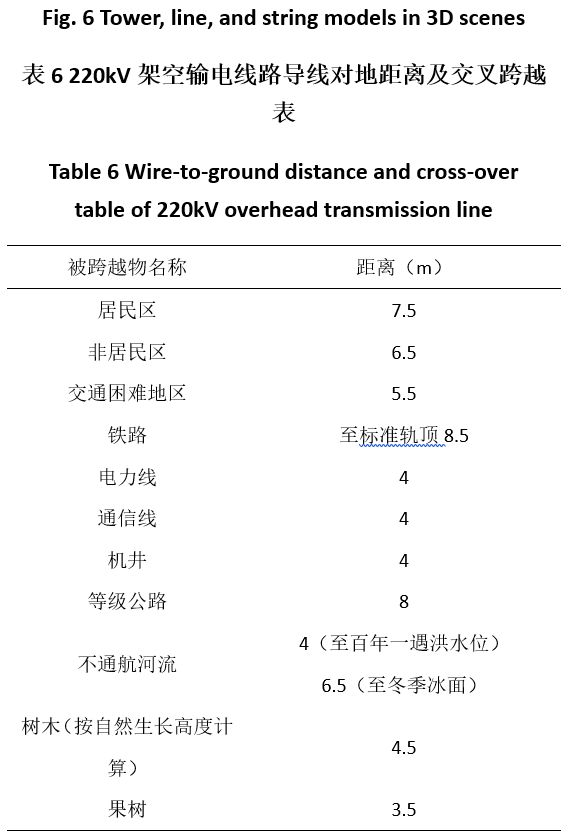
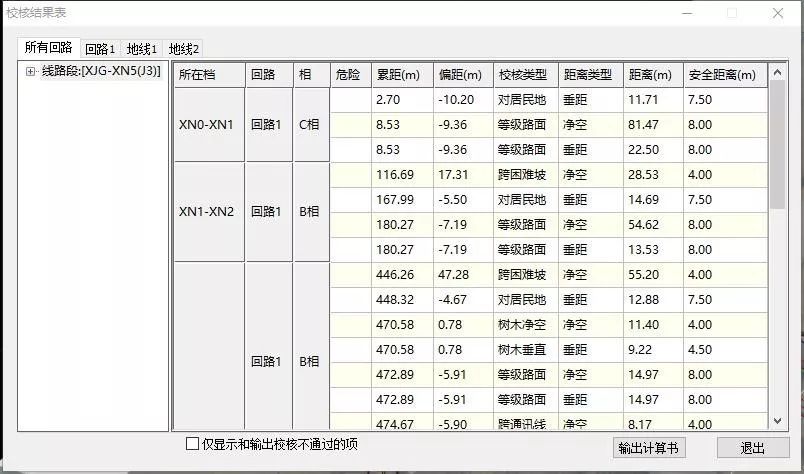
圖7 三維空間距離精確校驗(yàn)
Fig. 7 Accuratecalibration of three-dimensional space
六、效果評價(jià)
隨著國家電網(wǎng)公司基建部2018【585】號文的頒布,所有新建35kV及以上電壓等級輸變電工程均要求采用三維設(shè)計(jì)手段開展設(shè)計(jì)工作。通過無人機(jī)航測獲取線路走廊DOM與DEM,是輸電工程開展三維設(shè)計(jì)的前提。本文利用飛馬無人機(jī)D1000航測系統(tǒng)對輸電線路走廊進(jìn)行數(shù)字化三維建模,真實(shí)還原架空輸電線路工程實(shí)景模型,為輸電線路路徑優(yōu)化與交跨地物的空間距離量算提供了數(shù)據(jù)支撐。將本次研究成果與實(shí)測結(jié)果對比,可總結(jié)出利用飛馬航測系統(tǒng)開展輸電線路三維設(shè)計(jì)的優(yōu)勢如下。
(1)飛馬無人機(jī)操控及數(shù)據(jù)處理流程簡單快捷,易上手,新手經(jīng)過半天培訓(xùn)即可開展獨(dú)立作業(yè)(2)航測數(shù)據(jù)覆蓋面積廣,數(shù)據(jù)獲取速度快,即使線路路徑發(fā)生變動(dòng)也無需重測,方便開展路徑優(yōu)化工作。(3)基于DOM及DEM調(diào)繪沿線地物,可大量減輕傳統(tǒng)人工測量工作量。以本工程為例,傳統(tǒng)測量需2個(gè)工作日,而采用航測僅需1小時(shí)。(4)對于沿線需砍伐或高跨的樹木,由于人工測量只標(biāo)注行距與株距,而航攝影像可以清楚辨別單棵樹木,因此航測手段對樹木數(shù)量的統(tǒng)計(jì)更精準(zhǔn)。
-
輸電線路
+關(guān)注
關(guān)注
1文章
797瀏覽量
24479 -
數(shù)字化
+關(guān)注
關(guān)注
8文章
10663瀏覽量
67234
原文標(biāo)題:飛馬智能航測系統(tǒng)助力輸電線路三維設(shè)計(jì)
文章出處:【微信號:feimarobotics2015,微信公眾號:飛馬機(jī)器人】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
讓電線自己“說話”:輸電線路導(dǎo)線測溫裝置如何為電網(wǎng)裝上“神經(jīng)末梢”

輸電線路的作用和主要特點(diǎn)
“三跨”圖像視頻監(jiān)測裝置:為輸電線路安全保駕護(hù)航
輸電線路導(dǎo)線舞動(dòng)在線監(jiān)測裝置:實(shí)時(shí)守護(hù)電網(wǎng)安全的技術(shù)利器
輸電線路三跨線路圖像視頻監(jiān)測裝置:“全景攝像頭”
輸電線路邊緣物聯(lián)代理監(jiān)測裝置:技術(shù)解析與應(yīng)用價(jià)值

輸電線路的“智慧之眼”——觀冰精靈守護(hù)電網(wǎng)安全

輸電線路故障定位-從“盲找”到“精準(zhǔn)鎖定

輸電線路分布式故障定位裝置的原理、優(yōu)勢與應(yīng)用場景解析
輸電線路圖像視頻綜合監(jiān)測裝置:AI智能識別+多維傳感

輸電線路簡易球機(jī)監(jiān)控裝置的結(jié)構(gòu)配置與功能
輸電線路人工巡檢成本高?輸電線路視頻監(jiān)測設(shè)備降本增效新選擇

特力康輸電線路圖像監(jiān)控裝置的主要功能




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論