 在RobotStudio中怎么自動打開TCP跟蹤?
在RobotStudio中怎么自動打開TCP跟蹤?

在仿真機器人運動時候經常需要觀察機器人運動軌跡,以便對運動軌跡的適合與否進行判斷以往都是手動打開TCP軌跡,但是手動打開TCP軌跡又慢又切換不準確,這樣路徑復雜了以后就不利于觀察,那么有沒有一種方法可以隨時用程序打開TCP跟蹤呢?答案是有的但是要使用Smart組件下面就讓我們一起來學習一下吧。
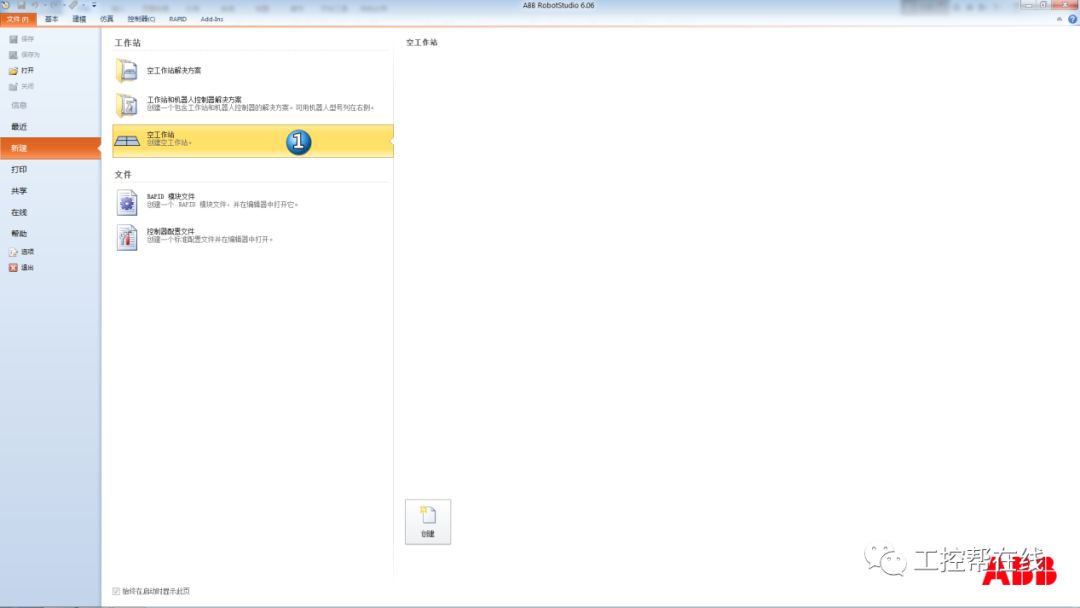
打開RobotStudio建立一個空工作站。
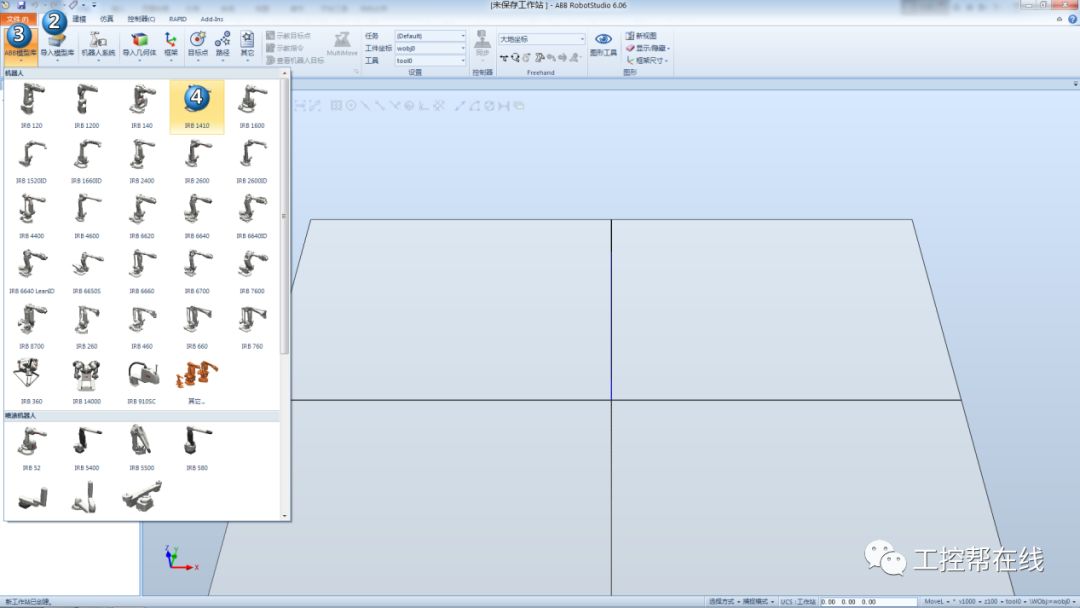
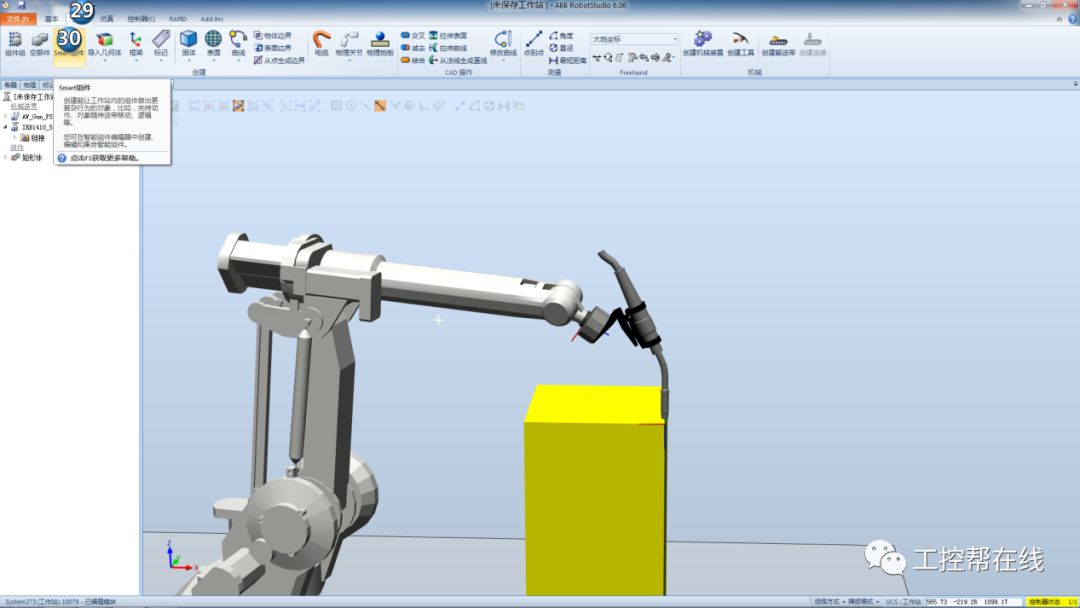
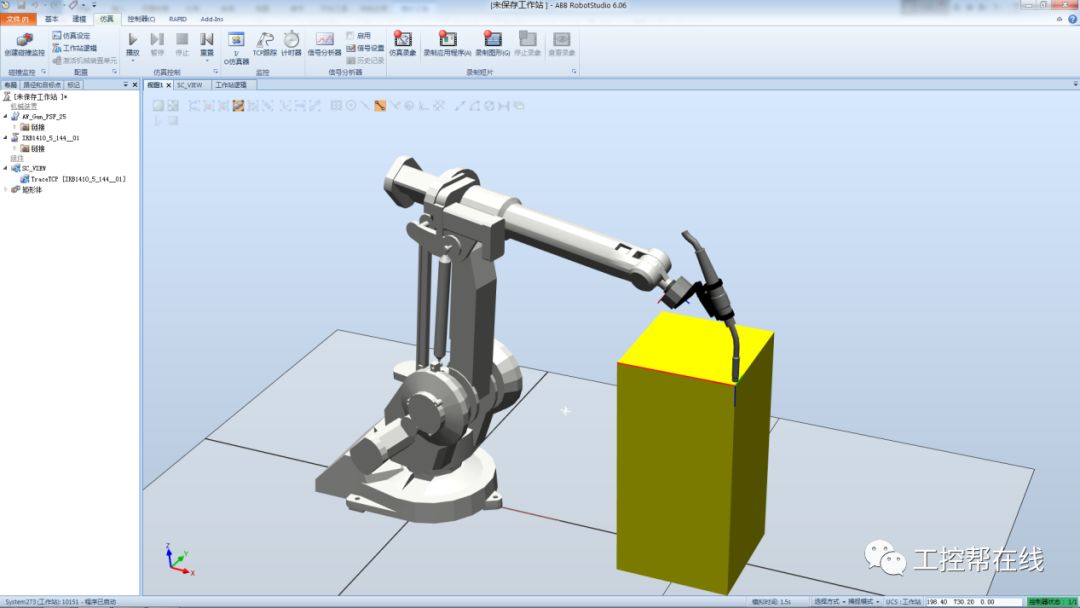
導入一臺IRB1410機器人。
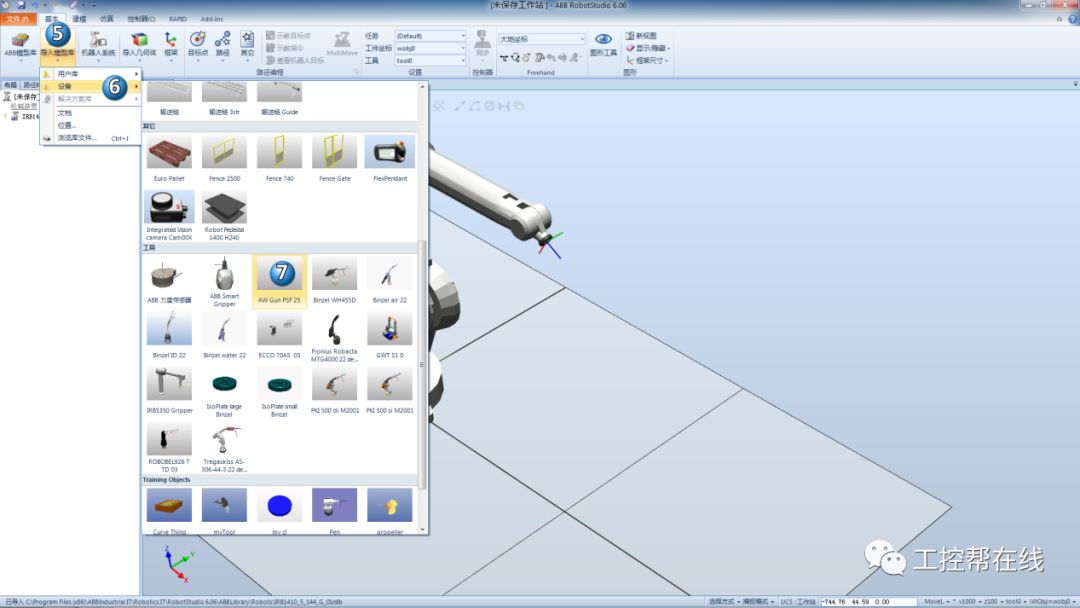
導入一把焊槍工具。
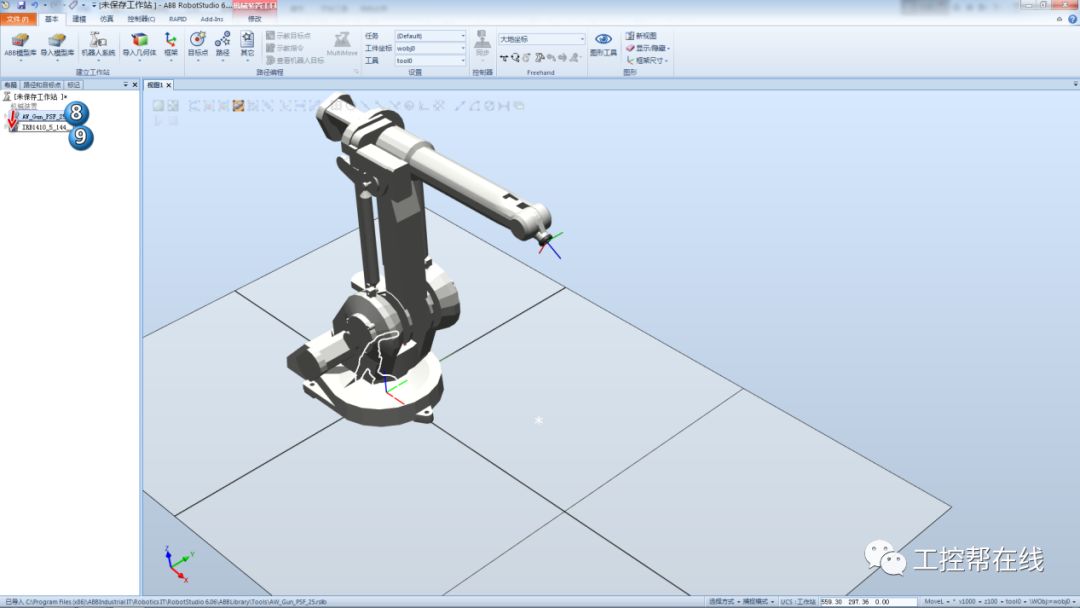
將其拖拽到機器人上,并更新位置。
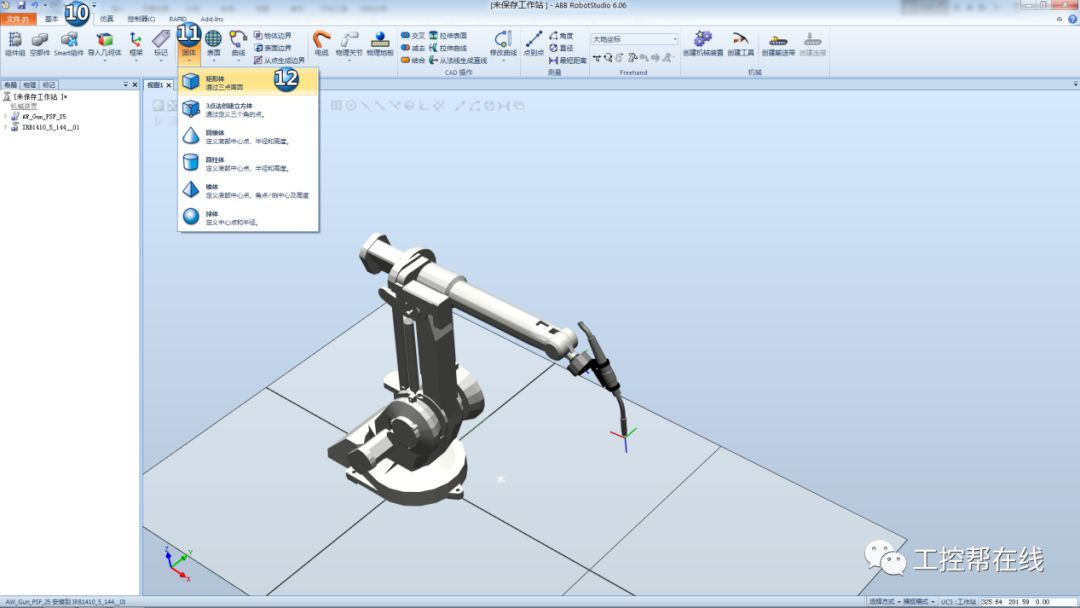
進入建模選項卡,選擇固體下的矩形體進行建模操作。
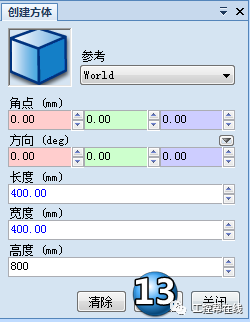
參數如下設定好了之后單擊“創建”。
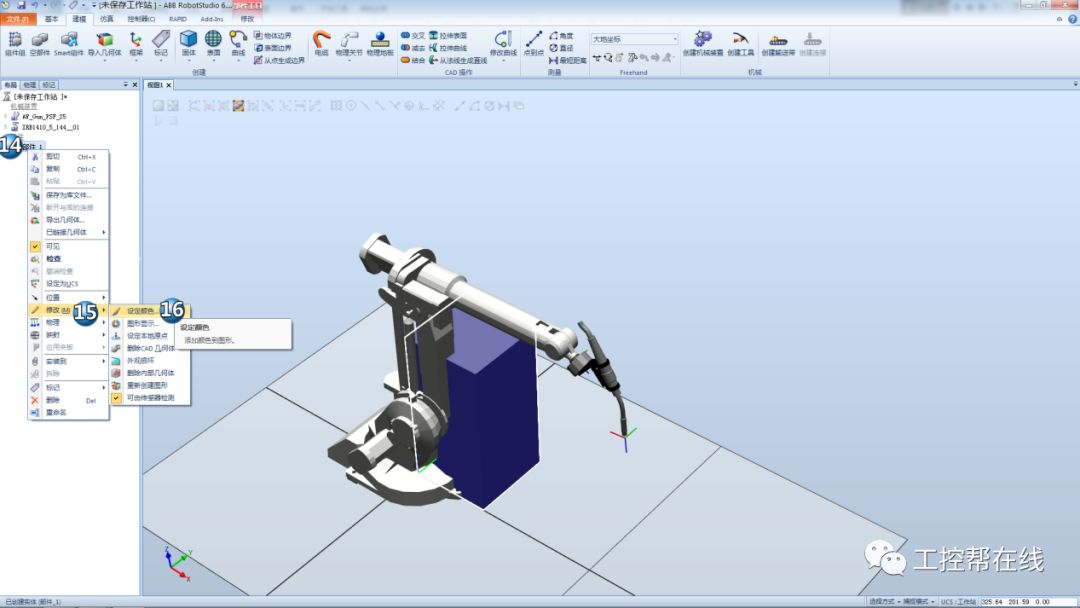
右鍵點擊部件,修改-設定顏色,設定一個自己喜歡的顏色。
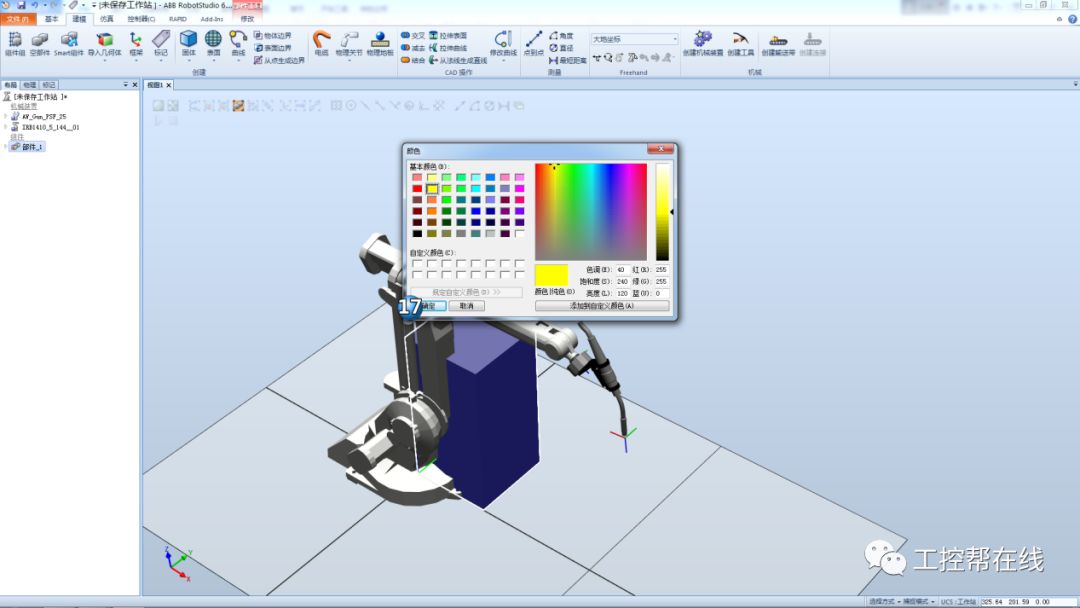
這里設定為黃色。
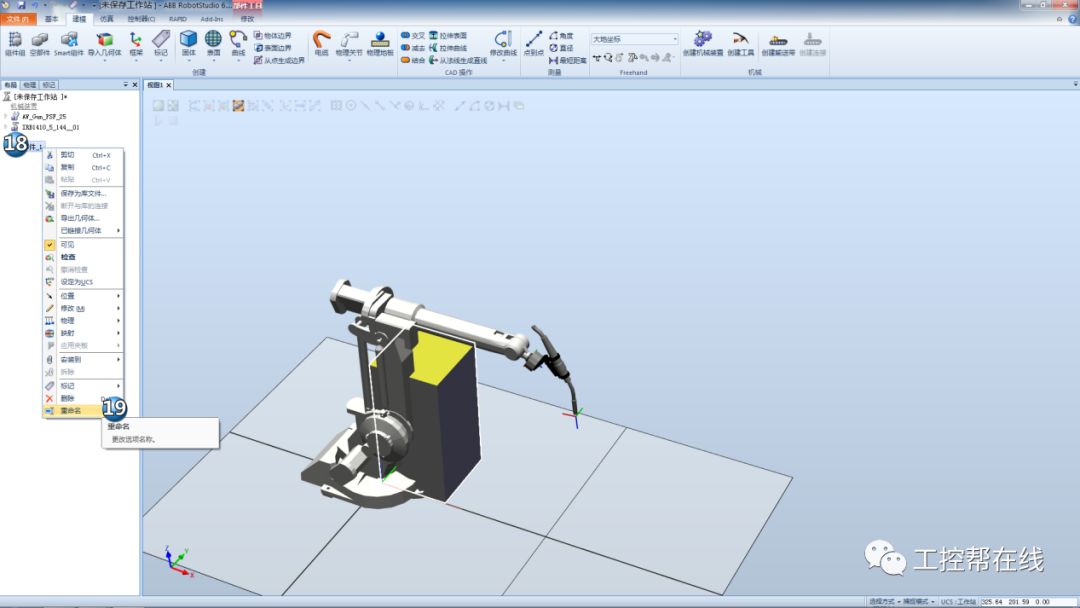
右鍵單擊對其重命名。
重命名為矩形體。
對其進行設定位置。
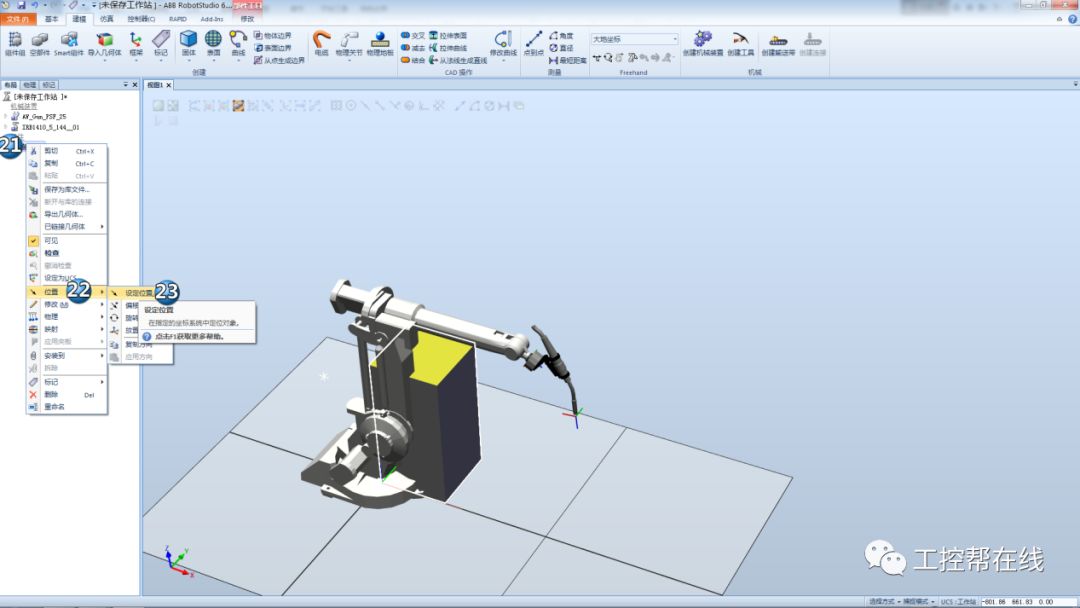
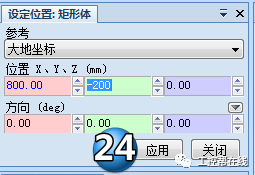
設定位置信息如下,設定完成后單擊應用。
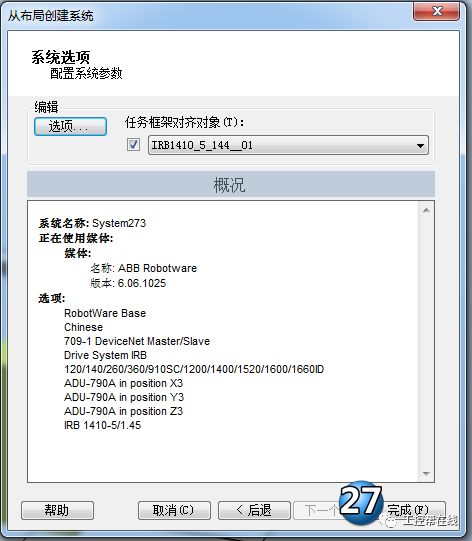
建立機器人系統。
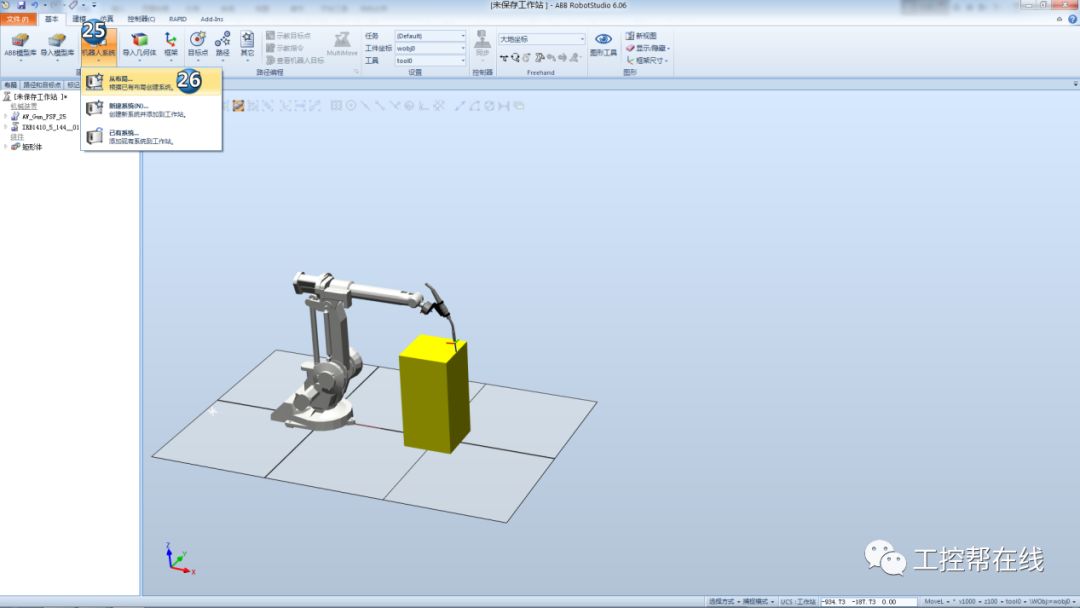
將中文與709-1選項包勾選上,勾選完畢后點擊完成。
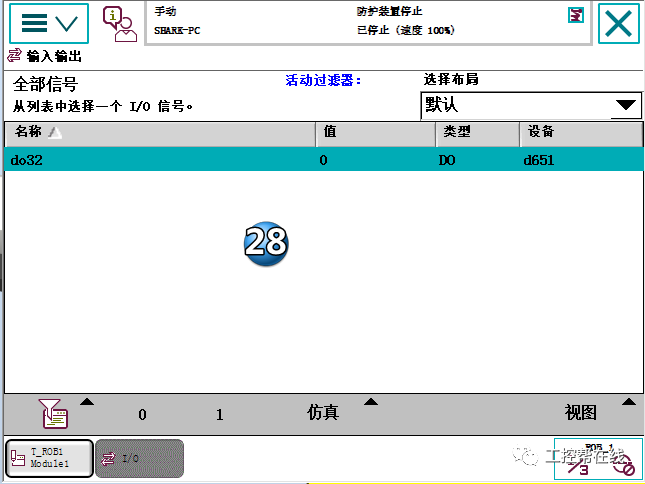
建立一個數字輸出信號用于控制打開關閉TCP跟蹤。
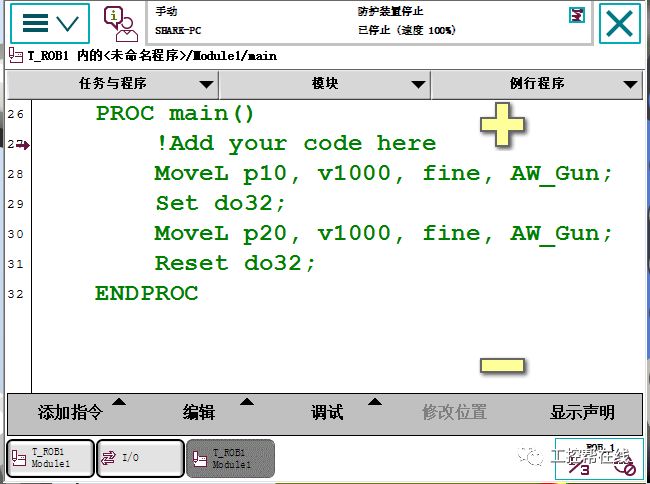
然后將畫一條直線的程序寫出來并在矩形體的一條上表面邊線上示教(p10是起點p20是終點),Set與Reset是用于控制TCP跟蹤的(最好使用同步過來的工具坐標系,不要使用默認工具坐標系)。
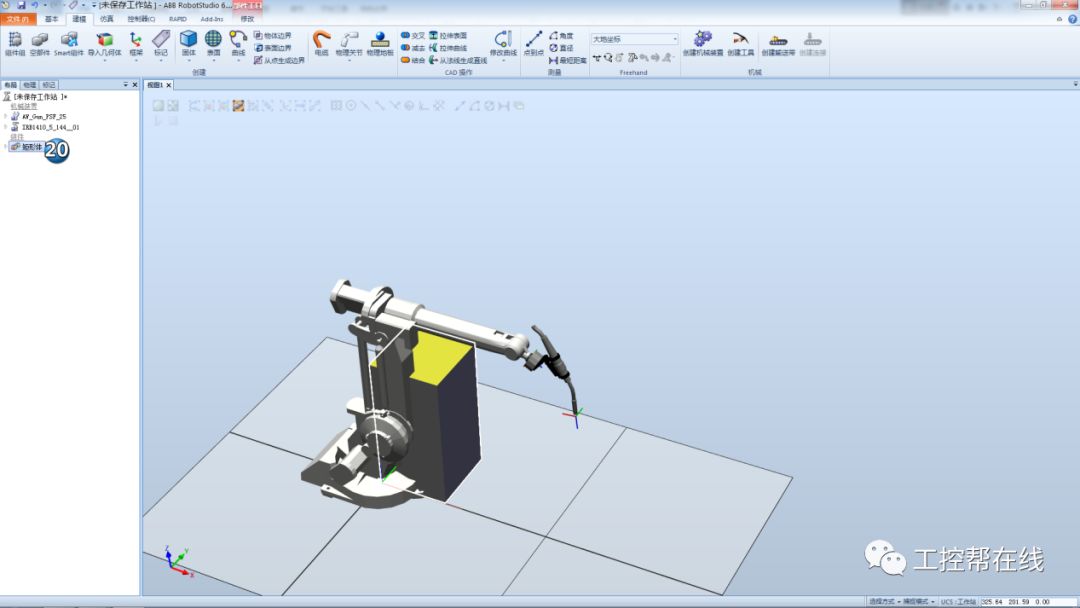
切換到建模選項卡,建立Smart組件。
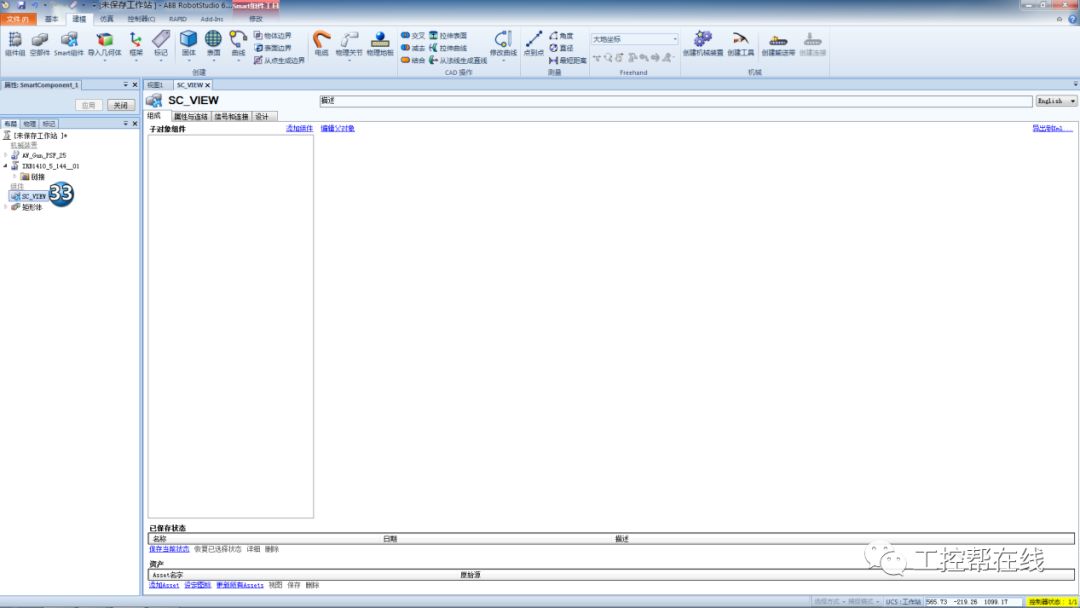
右鍵對其重命名。
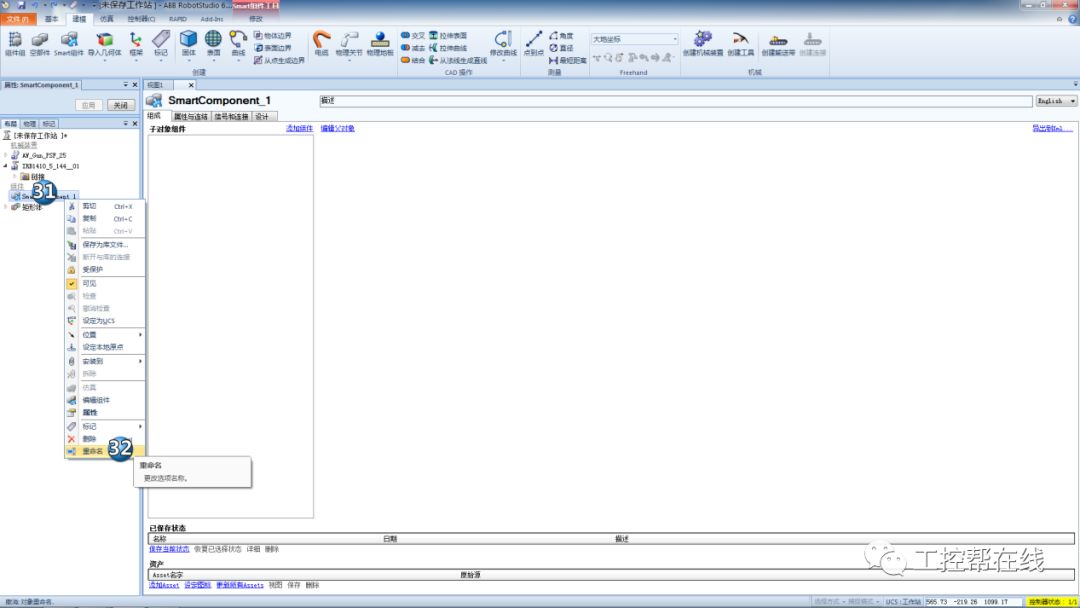
重命名為“SC_VIEW”。
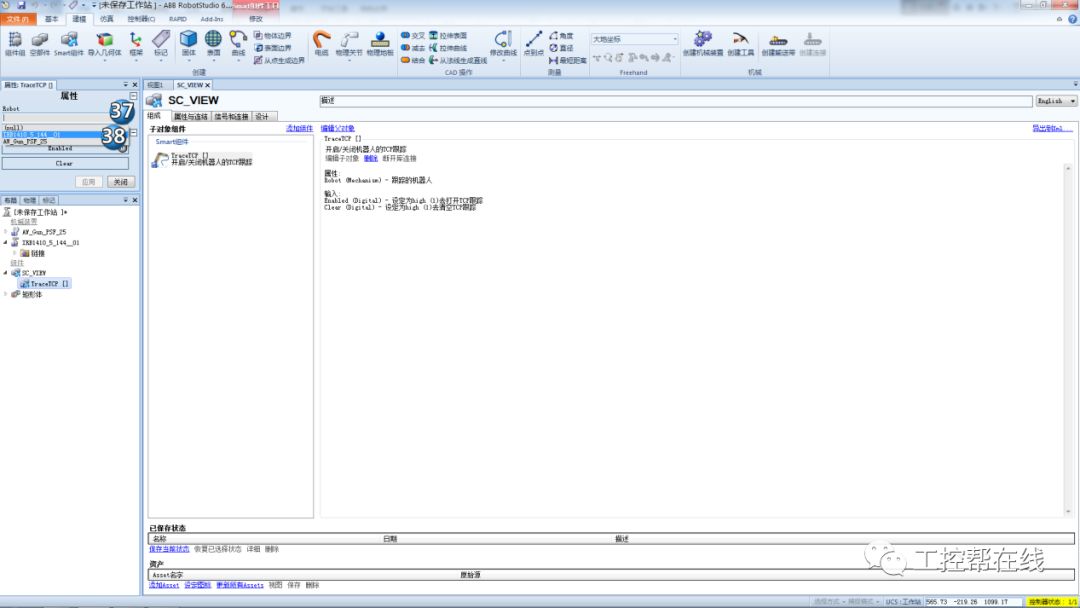
在“添加組件”-“其他”中選擇添加一個“TraceTCP”組件,這是專門用來打開關閉TCP跟蹤的組件。
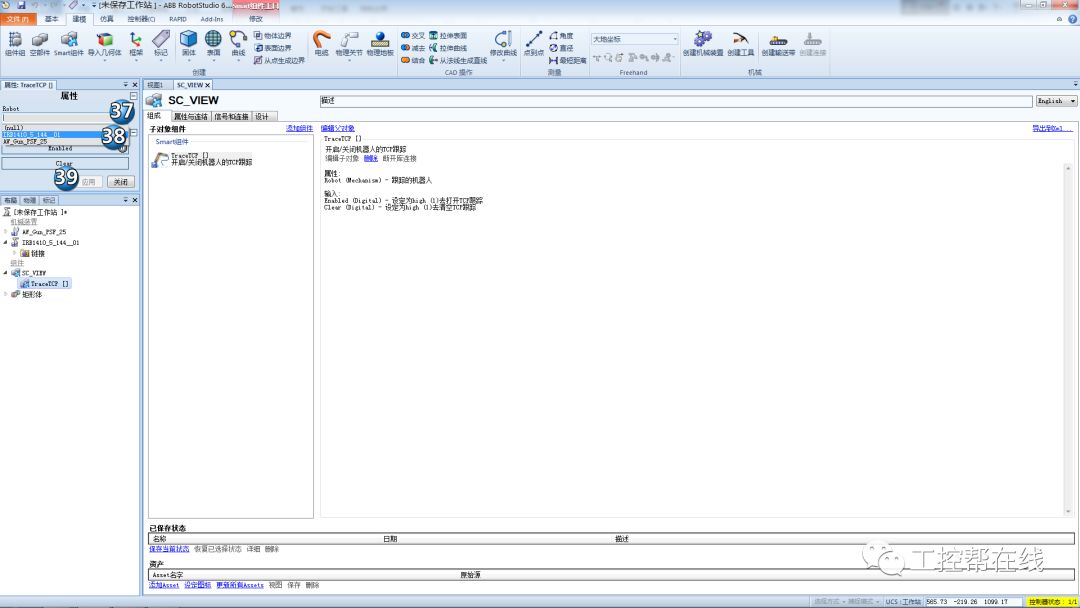
在其屬性中選擇我們當前的機器人。
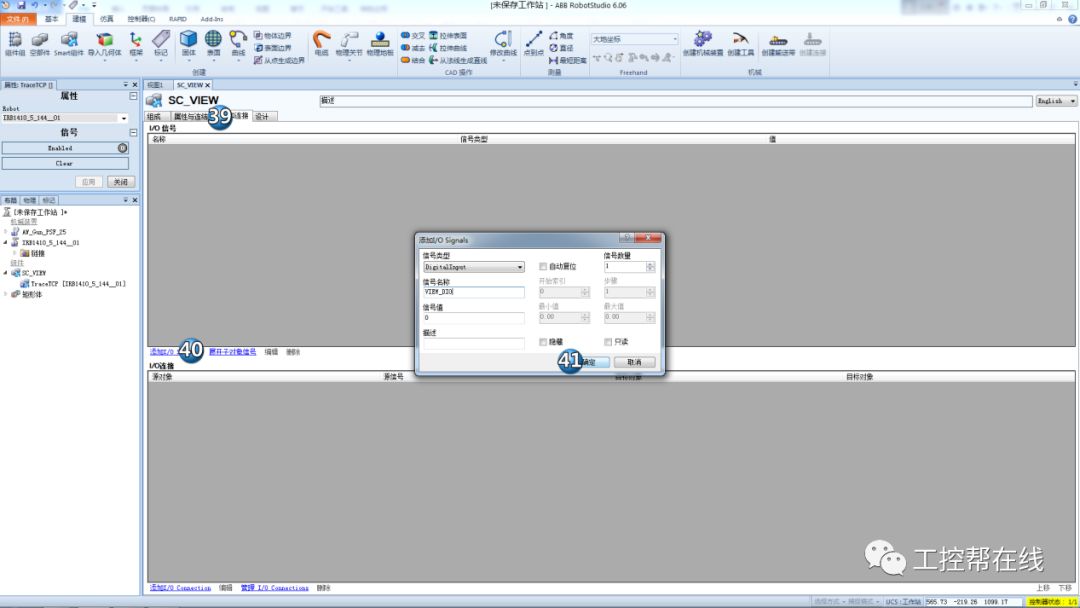
然后選擇信號和鏈接添加一個數字輸入信號“VIEW_DI0”。
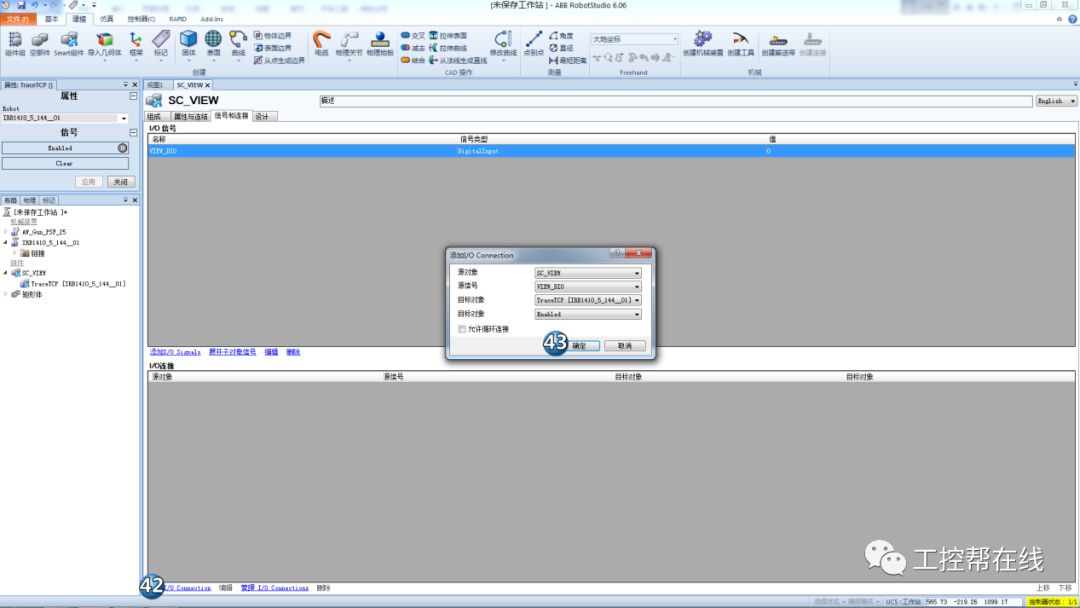
然后添加以下鏈接,將信號與組件關聯起來。
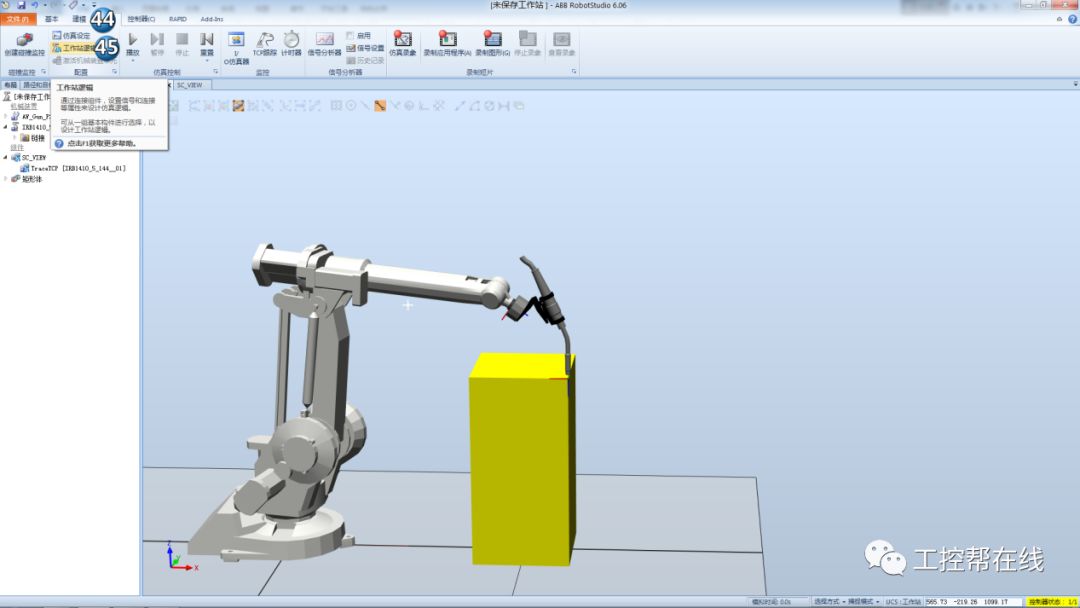
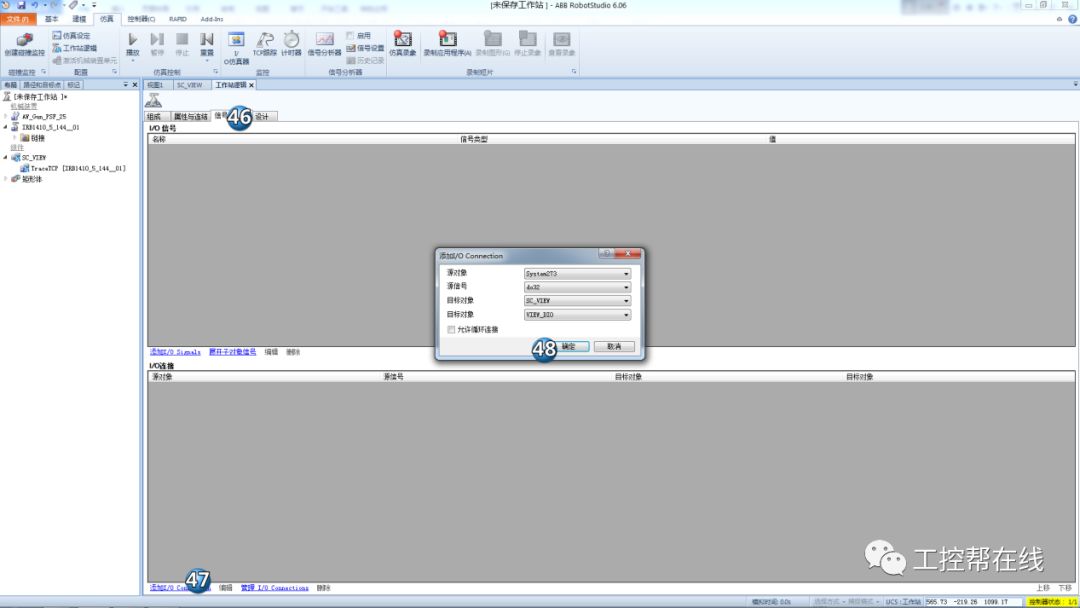
然后切換到“仿真”選項卡,進入工作站邏輯。
然后添加如下鏈接。
然后我們來調整下TCP跟蹤的顏色,使之明顯一些。
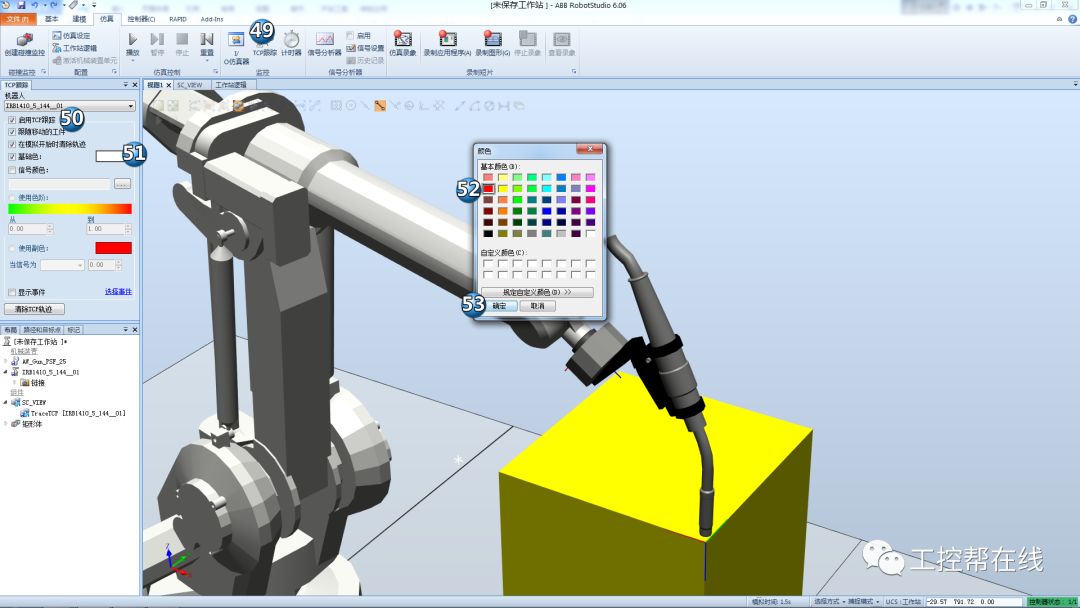
顏色調整好之后記得取消勾選TCP跟蹤然后關閉該菜單,因為我們這次要用程序來控制TCP跟蹤。
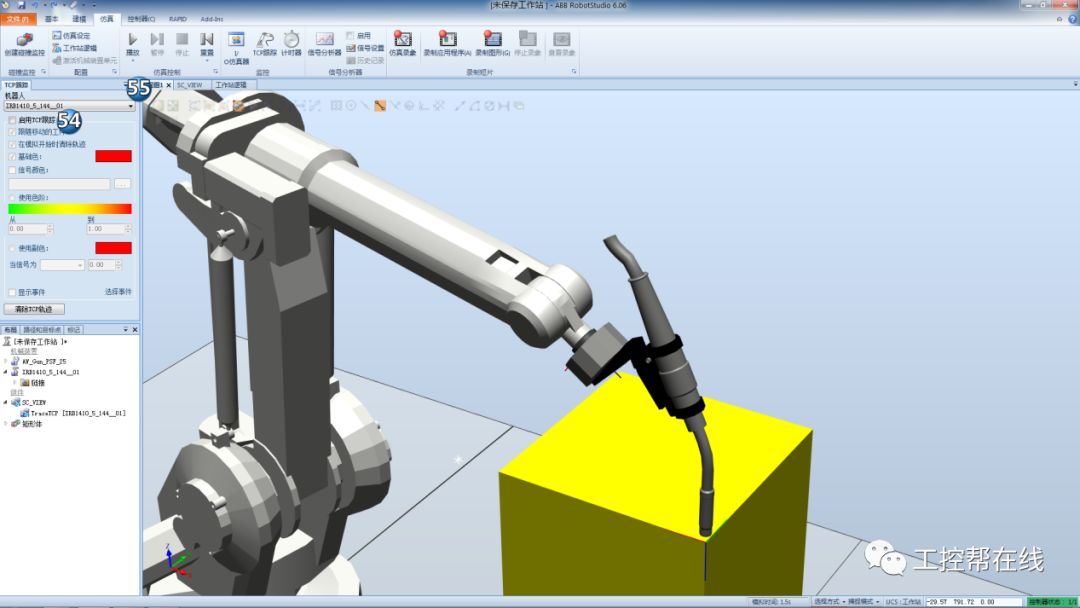
然后就可以測試運行了。
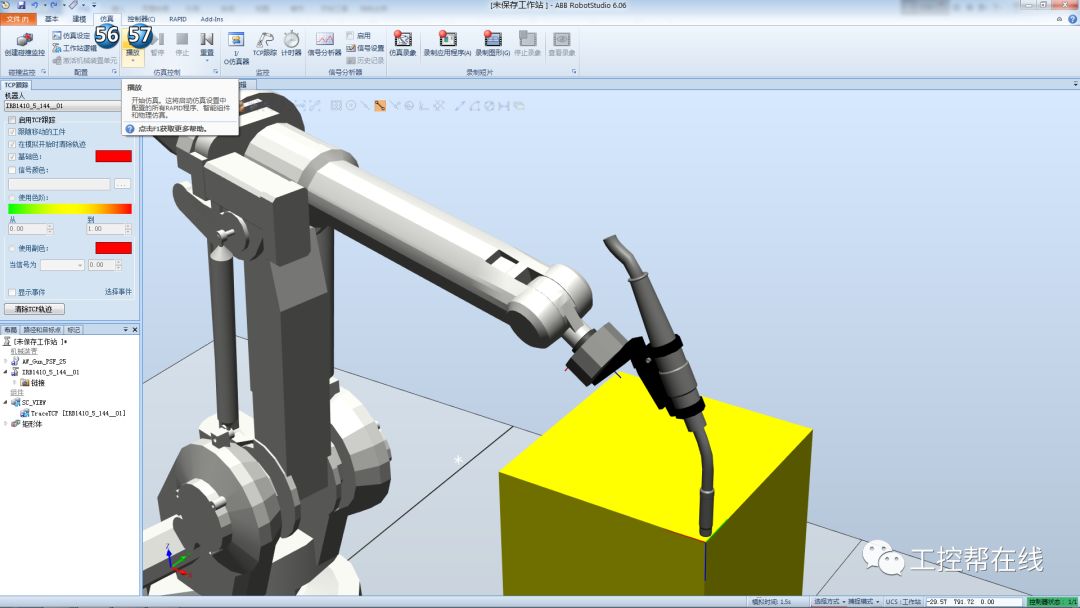
運行過后就出現了需要分析的軌跡。
-
RobotStudio
+關注
關注
4文章
10瀏覽量
5985
原文標題:在RobotStudio中怎么自動打開TCP跟蹤?
文章出處:【微信號:GKB1508,微信公眾號:工控幫】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
RobotStudio隨真實控制器安裝選項及應用

什么是自動高速跟蹤快球
視頻跟蹤(目標取差器)-基于DM8168實現的自動視頻跟蹤
請問在WICED中可以同時打開多少個TCP sockets?
自動化行業的Modbus TCP和PROFINET
Robotstudio軟件:工作站中多臺機器人I/O通信仿真實現分享
基于openmv的自動跟蹤小車實現
怎么安裝離線編程軟件RobotStudio?

RobotStudio中創建和控制變位機的詳細步驟

串口轉換TCP/IP服務器在電力抄表自動化系統中的應用
焊接自動跟蹤系統由什么組成
激光焊縫跟蹤傳感器在自動化焊接流程中的作用
labview打開TCP報63錯誤代碼
RobotStudio 6.08的手動操作方法

工業相機在焊縫跟蹤中的關鍵作用有哪些



 工商網監
工商網監
評論