 淺談自動駕駛等級定義及面臨的挑戰
淺談自動駕駛等級定義及面臨的挑戰

自動駕駛無疑是現今汽車領域最熱門的話題之一,無論是歷史悠久的汽車制造商或產業新星,皆在研發具有自動駕駛功能的汽車。拜摩爾定律(Moore’s Law)之賜,這些自動駕駛功能的開發者不僅大幅提升處理能力及改善傳感器技術,還降低了成本。
「自動駕駛」這個詞語涵蓋眾多功能的復雜技術領域,其中包含從「全自動駕駛」到「與駕駛共享控制權」。為利于分辨不同的自動駕駛能力,美國汽車工程師協會(Society of Automotive Engineers;SAE)便制訂如表1的自動駕駛分級標準。

表1 SAE 自動駕駛等級定義
隨著自動駕駛等級的提高,車輛也需要更妥善地掌握周圍環境并能安全行駛,為達到此需求,車輛需要采用包含超聲波傳感器、全球定位系統(GPS)、雷達(RADAR)、攝像頭和激光雷達(LiDAR)等多種類型的傳感器,以及具備相關的處理能力。
每種類型的傳感器都能提供汽車整體環境的相關信息,而自動駕駛汽車則需將這些元素融合在一起,才能構成一幅完整的影像。根據執行的自動駕駛等級,將改變傳感器的部署和類型,例如,攝像頭將用于車道維持輔助、盲點檢測和交通號志辨識等應用;而頻率調變連續波(FMCW)雷達則用于確定與目標物體間的距離。對于2級以上的自動駕駛等級而言,充分理解汽車所處的環境十分重要,這樣,汽車才能辨識自身位置和周圍障礙物,進而落實安全行駛,其可透過攝像頭、雷達、激光雷達,以及GPS信息來完成對所處環境的掌握。但只參考GPS信息并不可靠,因為其精準度會改變,且訊號易受建筑物和基礎設施阻隔影響。
能夠掌握所在環境并采取行動,是達到自動駕駛功能的關鍵條件,因此不論是SAE 6個等級中的哪一級,只要出現意外的運作或行動,生命與環境皆會受到威脅。所以自動駕駛功能的開發必須限定在一個框架內,以確保設計和所有要素的安全性,嚴格遵守ISO 26262標準是開發自動駕駛汽車的必要條件,若能實施該標準提供的框架,將有助于確保安全性,及定義多個車輛安全完整性等級(ASIL)與容許范圍內的失誤率。部署自動駕駛解決方案后,也將受到來自世界各市場的嚴苛環境考驗,為了確保系統在這些環境中能夠正常運行,汽車級元件需通過被廣泛認可的 AEC-Q100 或更高等級的資格認證。
架構執行自動駕駛功能的關鍵核心是中央處理模組。為了成功執行自駕功能,中央處理模組必須包含以下功能:- 信息整合、預處理和分配(DAPD):能連接不同類型傳感器,并在處理單元內的各個處理單元與加速器之間,執行基本的信息處理、路由和交換。- 高效能連續處理:高效能處理單元用于執行信息萃取和傳感器融合,并根據其輸入的資訊進行高階決策制定。在某些應用中,神經網絡會在高效能連續處理中運行。
- 安全處理:依據「DAPD元件預處理的環境信息」與「來自神經網絡加速與高效能連續處理單元的結果」進行即時處理與車輛控制。
創建中央處理模組時,設計人員會面對接口、擴展性、合規性和效能等多方面的挑戰,若部署于功耗和散熱受限的環境中,還要解決傳統的尺寸、重量,以及功耗成本(Size, Weight and Power-Cost,SWaP-C)的難題,而在設計DAPD和安全處理器時,SWaP-C的難題尤為明顯。
解決挑戰使用單個元件是解決這些挑戰的方案之一,此方法不僅能在同一個芯片中提供DAPD的接口、預處理和路由功能,還具備安全處理甚至是神經網絡加速功能。這種高度整合的方法,打造了非常有利于解決SWaP-C的緊密整合解決方案。賽靈思(Xilinx)車規級Zynq UltraScale+ MPSoC異質單芯片系統,可用來運作這類高度整合解決方案,該元件提供四個高效能Arm Cortex-A53核心的可編程邏輯,來構成緊密整合的處理單元。此外,針對即時控制,異質單芯片系統還提供包含鎖步(Lockstep)雙Arm Cortex-5處理器的即時處理單元(RPU),不僅可執行高達ASIL C等級的安全功能,還可用于安全關鍵型應用。為了提供必要的功能安全性,RPU經過精心設計,具有減少、檢測和緩解單個隨機故障(包括由硬件和單個事件觸發)的能力,這些元件能有效地在處理器系統資源與可編程邏輯之間進行功能區分。
DAPD帶來的主要挑戰在于如何在采用不同接口標準的眾多類型傳感器間建立連接。典型的解決方案是連接采用高速接口的多種傳感器,如MIPI、JESD204B、LVDS和GigE,來達到攝像頭、雷達和激光雷達這樣的高頻寬接口。但除此之外,DAPD還需要連接較慢的接口,如CAN、SPI、I2C和UART。若使用異質單芯片系統的處理系統(PS)和可編程邏輯(PL),便可支持多種業界標準接口,包括SPI、I2C、UART和GigE;同時,PL IO的高靈活性能讓MIPI、LVDS和十億位元串列連結直接連接,允許在PL中(通常使用IP核心)運作更高階的協定。
此外,在 PL中執行協定還能帶來其他優勢,例如輕松引入標準修訂,以及能靈活設定解決方案所支持的具體傳感器接口數量。而且,只要硬件設計提供正確的PHY,PL便可運作任意接口,真正落實任意到任意的接口功能。車規級Zynq UltraScale+ MPSoC的PL還能加速神經網絡。由于PL具有平行特性,因此相較于傳統采用CPU/GPU的方法,神經網絡的執行更具回應性和確定性,因其消除了不同等級之間傳統的外部存儲器瓶頸。透過使用C、C++和OpenCL等這類高級語言,能在系統最佳化編譯器SDSoC中運作這些神經網絡,進而將功能從處理器系統無縫遷移到可編程邏輯內。另一大挑戰是如何運作安全處理器,其必須依照從DAPD和高效能連續處理所接收到的命令進行操作,這些命令能確保車輛在所處環境中安全行駛,因此,安全處理器需要與汽車控制系統(如轉向、加速和剎車)直接進行互動,這是自動駕駛功能的一大關鍵層面,因為任何錯誤將會導致生命的喪失和環境的破壞。異質單芯片系統在RPU中包含鎖步雙Arm Cortex-R5核心,可用于運作安全處理。
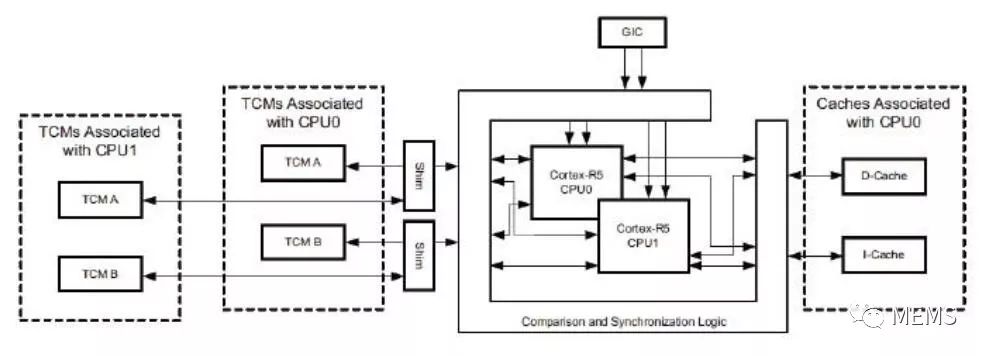
圖2 即時處理單元架構
RPU 核心不僅具有鎖步功能,還能執行多個附加的緩解功能。其中包括用于將 RPU 與存儲器和快取存儲器緊密耦合的糾錯碼(Error Correction Code),以及用于保護DDR存儲器的雙錯誤檢測單個錯誤校正代碼。在快取存儲器和存儲器中加入ECC功能,可確保執行自動駕駛汽車控制所需的應用程序和信息的完整性。此外,為了確保運作前底層硬件沒有故障,還有提供啟動時的內建自檢測(BIST)功能,也可在運作過程中按照使用者的需求執行附加的BIST操作。此外,異質單芯片系統的架構還能在元件中隔離存儲器和周邊的功能。異質單芯片系統導入的這些功能,讓同一芯片中能夠落實安全處理、DAPD、甚至神經網絡加速。為了確保擁有業界領先的元件品質,賽靈思收集了產業需求并將其融入到名為Beyond-AEC-Q100的內部品質控制計劃中。此外,這款異質單芯片框架中,將大部分的測試要求加倍,以確保達到汽車級元件的安全限度,不僅如此,更高整合度還能降低最終解決方案所需的PCB設計和互連的復雜性,同時達到更低功耗。
總結
提供自動駕駛功能需要運作中央處理模組,該模組面臨SWaP-C的挑戰,因此采用針對DAPD、神經網絡加速器和安全處理器的車規級高整合度解決方案,能夠落實更小巧、更輕便、更低功耗的解決方案。
-
傳感器
+關注
關注
2576文章
55067瀏覽量
791516 -
自動駕駛
+關注
關注
794文章
14890瀏覽量
180003
原文標題:解決自動駕駛的挑戰
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
自動駕駛汽車如何實現自動駕駛

如何設計好自動駕駛ODD?
汽車自動駕駛的太陽光模擬應用研究

自動駕駛數據采集時間同步指南:方法、挑戰、場景與康謀解決方案
不同等級的自動駕駛技術要求上有何不同?
自動駕駛仿真測試有什么具體要求?

如何確保自動駕駛汽車感知的準確性?

塑造自動駕駛汽車格局的核心技術
太陽光模擬器 | 在汽車自動駕駛開發中的應用
卡車、礦車的自動駕駛和乘用車的自動駕駛在技術要求上有何不同?

自動駕駛是為了“增強人”,還是為了“替代人”?
自動駕駛安全基石:ODD
《汽車駕駛自動化分級》會更適合中國自動駕駛發展嗎?

新能源車軟件單元測試深度解析:自動駕駛系統視角




 工商網監
工商網監
評論