 Dumbo Octopus:重力的衰落
Dumbo Octopus:重力的衰落

Dumbo Octopus從機械外星人的海底家中捕獲,必須穿越一個奇怪而迷失方向的環境,同時避開火箭,激光和其他危險移動動作平臺游戲。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
激光
+關注
關注
21文章
3658瀏覽量
69633 -
游戲
+關注
關注
2文章
790瀏覽量
27467
發布評論請先 登錄
相關推薦
熱點推薦
如何以編程方式在觸摸屏 MIPI 顯示器上旋轉圖像?
,執行了命令,但沒有任何反應。同時,Gnome 成功地根據重力傳感器自動旋轉圖像,但這并不適合我。我正在禁用與重力傳感器配合使用的服務。 我需要在手動模式下旋轉并鎖定圖像,以便在搖晃或意外旋轉時它不再旋轉。有人有與 MIPI 觸摸屏交互的經驗嗎?
發表于 02-04 06:45
深圳反重力科技純電動單人智能飛行器完成首次試飛
2025年11月1日,震有科技子公司——深圳反重力科技有限公司,成功完成自主研發的純電動單人智能飛行器首次公開試飛。試飛過程穩定順利,飛行器在起降、懸停、轉向及自主返航等多個關鍵科目中表現優異,標志著震有科技在低空經濟領域的重要技術布局取得實質性突破。
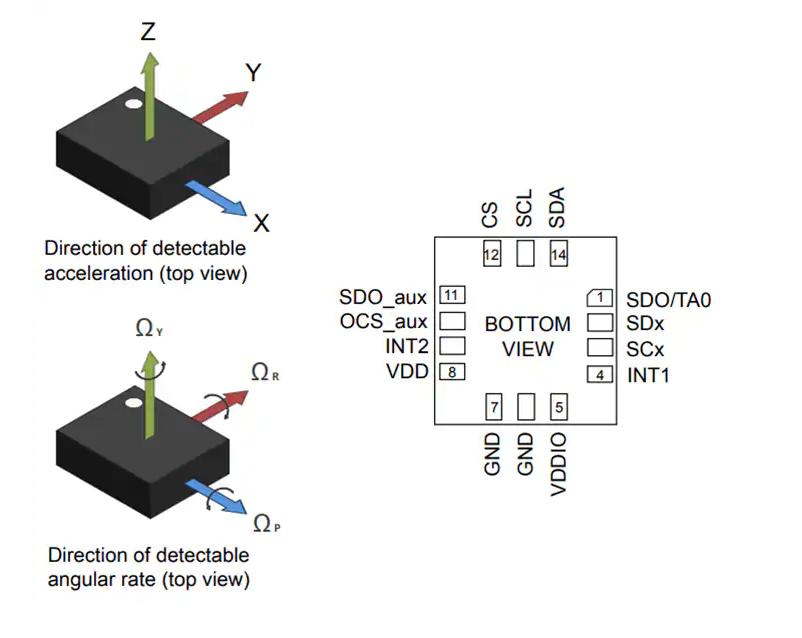
ISM6HG256X智能慣性測量單元(IMU)技術解析
STMicroelectronics ISM6HG256X智能慣性測量單元 (IMU) 是一款高性能、低噪聲、低功耗的6軸IMU。該設備配備了三軸數字低重力加速度計 (16g)、三軸數字高重力加速計
460萬英鎊!Delta.g獲得超額認購種子輪融資,以擴大量子傳感技術的規模
總部位于英國的量子技術公司Delta.g近日宣布完成460萬英鎊超額認購的種子輪融資,資金將用于加速其量子重力傳感平臺的研發與商業化部署。本輪融資由Serendipity Capital領投,英國

為啥無線模塊一多就卡?都是報文“撞車”惹的禍!
深入解析無線模塊在多節點環境下卡頓的根源:從信道競爭、報文碰撞概率指數增長,到多徑衰落和干涉現象,揭示Wi-Fi、藍牙等無線通信中隱藏的沖突機制,并探討載波偵聽、隨機退避、TDMA等解決方案如何構建空中交通規則,提升網絡效率。
天舟九號攜新型熱界面材料升空,突破空間微重力傳熱技術
耐久性熱界面材料隨"空間滴狀冷凝傳熱實驗模塊"進入太空,標志著我國在微重力環境熱管理領域取得突破性進展。01國際首次!空間熱界面材料在軌實驗啟動搭載的"空間滴狀冷凝

G-sensor運動檢測功能開源:解鎖硬件創新的無限可能!
G-sensor(重力傳感器)作為感知加速度變化的核心技術,如今其運動檢測功能的完整源碼全面開放。開發者可深入內核算法,定制靈敏度和檢測模型,從智能設備到工業監測,這項開源技術為硬件創新提供了


納祥科技客戶案例 | 集計時、照明、裝飾于一體的電子沙漏計時器方案
傳統沙漏作為計時工具,雖具備儀式感,但存在功能單一、無法實時調整具體定時等局限性。應客戶需求,納祥科技推出了結合LED顯示、重力感應、低功耗等技術的電子沙漏計時器方案,實現傳統沙漏的美學與現代
長城汽車魏牌全新高山和藍山榮獲EAC 2025技術創新大獎
近日,EAC 2025易貿汽車產業展暨產業大會在杭州開幕。會上,長城汽車魏牌全新高山憑借「零重力座椅」的舒適性斬獲“EAC 2025 年度座椅評選-年度創新座椅獎”,全新藍山以「易清潔織物」摘得“E-Design Awards 2025 材料創新獎”。
PPLN應用于惡劣環境中的波長轉換
在我們上一篇文章中《應用探究|PPLN波導賦能量子重力傳感:星載冷原子干涉儀應用》,我們分享了昊量光電提供的英國CovesionMgO:PPLN波導組件應用于重力儀中的冷原子干涉儀的應用,憑借其環境

樹莓派打造零重力實驗室懸浮平臺!
通過打造地面機器人助力太空探索。在最新一期的《樹莓派官方雜志》中,RobZwetsloot深入探究了這一前沿領域。零重力環境十分奇特。我們大多數人很難真正想象出在太空任務中所經歷的那種失重環境,而且

FORVIA佛瑞亞靈盾60骨架大角度乘員保護方案亮相
憑借舒適乘坐體驗,零重力座椅成功俘獲市場的青睞。然而,如何在享受零重力姿態的同時確保乘員安全,已成為行業和監管機構關注的重點。全球汽車科技供應商FORVIA佛瑞亞集團與均勝安全強強聯合,專為中國市場量身定制,強勢推出破局之策——靈盾60骨架。
應用探究|PPLN波導賦能量子重力傳感:星載冷原子干涉儀應用
基于MgO:PPLN波導的1560nm至780nm高效倍頻技術,冷原子干涉技術通過銣原子冷卻與物質波干涉,實現了對于重力加速度的精密測量。憑借由昊量光電代理的英國CovesionPPLN波導在惡劣
提取LSM6DSV16X內置低功耗融合算法輸出的四元數后,轉換成歐拉角后遇到一個問題求解
各位大佬好,在提取LSM6DSV16X內置低功耗融合算法輸出的四元數后,轉換成歐拉角后遇到一個問題,當Y軸與重力方向平行時,輸出的角度與慣性測量單元繞自身Y軸轉過的角度對應不上,且抖動增加,請問有什么解決方法嗎?
發表于 03-14 06:55



 工商網監
工商網監
評論