 步進電機及驅動器干擾問題解決措施
步進電機及驅動器干擾問題解決措施

步進電機驅動器通常采用PWM(脈寬調制)技術,其產生的高次諧波和快速開關瞬變是主要的干擾源。這種干擾不僅可能通過電源線和空間輻射影響周圍電子設備,還可能導致控制系統死機、通信錯誤或電機失步。

解決干擾問題需要采取系統性措施,可以從抑制干擾源、切斷傳播路徑、提高敏感設備抗擾度三個維度入手。以下是具體措施:
1. 抑制干擾源(源頭治理)
加裝專用濾波器:在驅動器電源輸入端加裝電源濾波器,阻斷干擾沿電源線傳播。普通的通用濾波器對電機工作頻段(幾百Hz至幾十kHz)效果有限,應選用專門針對電機類產品的濾波器(如π型濾波結構),可有效抑制共模和差模干擾。
接觸器線圈/電機端子增加吸收元件:如果系統中有接觸器,線圈需加裝滅弧器(阻容吸收)。針對電機本體,可在電機接線端子內部焊接0.1μF~1μF的陶瓷電容,吸收電機繞組產生的尖峰電壓。
確保驅動器良好接地:將驅動器的PE(接地)端子直接連接到機箱的接地柱上,且接觸良好。
2. 切斷傳播路徑(布線屏蔽與隔離)
信號線與動力線分離:控制信號線必須與電機線、電源線分開走線,保持至少10cm-20cm的距離,嚴禁捆扎在一起,避免交叉。
使用屏蔽電纜:控制信號和編碼器反饋必須使用屏蔽雙絞線。屏蔽層需采用單端接地(通常在控制器一端接地,驅動器一端懸空),以避免形成地環路引入新的干擾。
電氣隔離(光耦/數字隔離器):使用高速光耦(如6N137)或數字隔離器(如Si8640)將控制側的弱電信號(MCU)與驅動側的強電信號(MOSFET)完全隔離開。這不僅能切斷地回路噪聲,還能保護控制器免受高壓浪涌沖擊。
使用差分信號傳輸:對于脈沖方向信號,盡量采用長線驅動器(Line Driver)輸出(如RS-422標準),利用電壓差判斷信號,抗干擾能力遠超普通的集電極開路信號。
3. 提高系統抗擾度(控制器端保護)
控制器電源加磁珠/去耦電容:在單片機的電源引腳處,嚴格按照數據手冊要求就近放置去耦電容(如0.1μF),并考慮在電源入口串聯磁珠,濾除高頻噪聲。
PCB布局分區:在電路板設計時,將數字地(小信號)和功率地(大電流)嚴格分開,最后通過單點連接(通常是在電源濾波電容的負極處)匯合,防止大電流竄入控制邏輯電路。
軟件防錯(看門狗):在軟件層面開啟獨立看門狗,防止因干擾導致程序跑飛或死機后無法自動恢復。
4. 實際操作排查步驟
最小系統法:斷開負載和外部IO,只保留控制器和驅動器,逐步恢復部件,觀察故障出現的時間點以定位干擾源。
電源檢查:用示波器觀察開關電源輸出端的紋波,以及驅動器電源電壓。如果電壓跌落或紋波過大(如超過標稱值的10%),說明電源容量不足或受到嚴重污染,需更換更大功率的電源或加裝濾波器。
總結與檢查清單
為了避免遺漏,可以對照下表進行快速排查:
| 類別 | 檢查項 | 核心要求 |
|---|---|---|
| 接地 | 系統接地 | 采用單點接地,確保接地柱接觸電阻<4Ω,避免形成接地環路 |
| 布線 | 線纜分離 | 信號線與電機線分開至少10cm;若必須交叉,應垂直跨越而非平行 |
| 硬件 | 隔離與濾波 | 控制信號經光耦/數字隔離器;驅動器電源輸入端加專用濾波器 |
| 信號 | 信號類型 | 長距離傳輸優先采用差分信號(Line Driver);屏蔽層單端接地 |
| 軟件 | 容錯機制 | 啟用看門狗,增加電機啟停時的延時(G4 P0.5) |
通過上述措施,可以有效解決絕大多數步進電機系統的干擾問題,保障系統的穩定運行。
審核編輯 黃宇
-
驅動器
+關注
關注
54文章
9109瀏覽量
156302 -
步進電機
+關注
關注
153文章
3267瀏覽量
152669
發布評論請先 登錄
SGM42622低電壓步進電機驅動器:特性、應用與設計要點
步進電機驅動器的作用介紹

DRV8846雙H橋步進電機驅動器:特性、應用與設計要點解析
DRV8886AT步進電機驅動器:特性、應用與設計要點
HR4988微特步進電機驅動器:高效便捷的驅動解決方案
?DRV8821 雙路步進電機控制器與驅動器技術文檔總結
?DRV8824-Q1 汽車級步進電機驅動器技術文檔總結
?DRV8846 雙H橋步進電機驅動器技術文檔總結
?DRV8818A 35V步進電機驅動器技術文檔總結
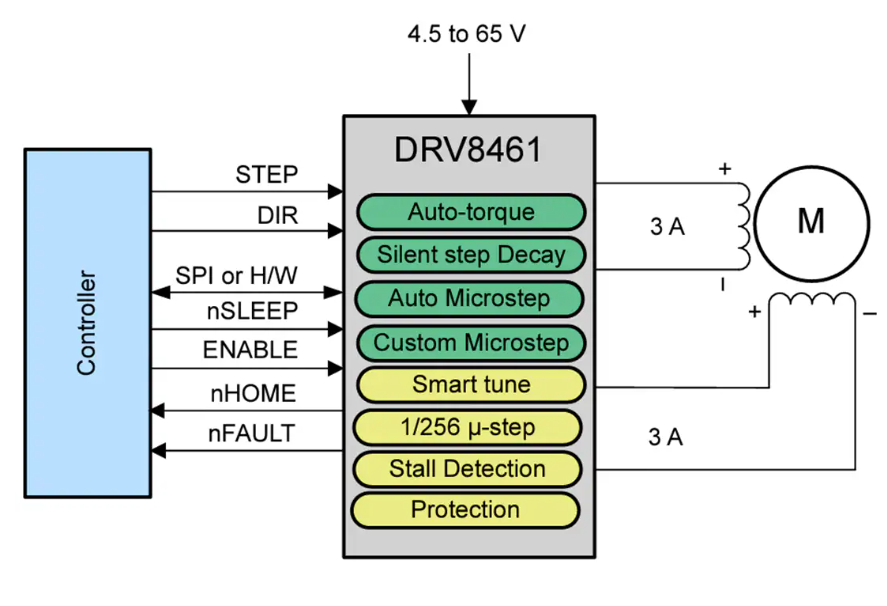
DRV8461步進電機驅動器技術解析與應用指南
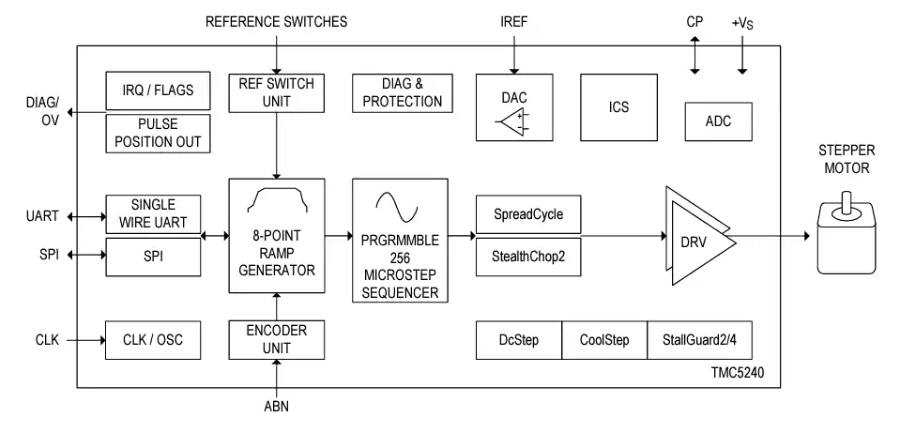
ADI Trinamic TMC5240x步進電機控制器和驅動器IC




 工商網監
工商網監
評論