 PID與自動增益對比分析
PID與自動增益對比分析

PID(比例-積分-微分控制)和自動增益控制(AGC,Automatic Gain Control)都是經典的閉環控制算法,但它們的目標、應用場景和原理有本質區別。

簡單來說:
PID追求的是讓某個物理量精確等于設定值,擅長處理動態變化。
AGC追求的是讓輸出信號的幅度保持恒定,擅長應對輸入信號的大范圍波動。
下面從幾個維度詳細對比:
一、 核心目標
| 特性 | PID 控制 | 自動增益控制 (AGC) |
|---|---|---|
| 控制目標 | 使被控量(位置、溫度、速度等)精確跟隨設定值 | 使輸出信號的幅度(或功率)保持恒定 |
| 誤差定義 | 設定值 - 當前值 | 參考電平 - 輸出幅度(或輸出幅度 - 設定值) |
| 本質 | 隨動/調節系統,消除動態與穩態誤差 | 幅度穩定系統,抑制輸入信號幅度變化 |
二、 典型應用場景
PID 控制
物理量控制:電機轉速、無人機姿態、恒溫箱溫度、機器人關節位置。
工業過程:流量、壓力、液位控制。
特點:被控對象通常是機械、熱力、電磁等具有慣性和延遲的系統。
自動增益控制
通信系統:無線接收機中,保證無論遠近信號強弱,解調器輸入幅度穩定。
測試儀器:頻譜儀、示波器中的中頻增益控制,以擴展動態范圍。
特點:處理的是電信號(電壓/電流),對象通常是可變增益放大器(VGA)或數字乘法器。
三、 控制結構對比
PID 控制結構
典型的負反饋結構:

控制器輸出直接作用于執行機構(如電機、加熱絲)。
AGC 控制結構
也是一種負反饋,但通常包含幅度檢測環節:

控制器輸出是增益控制電壓(或數字控制字)。
反饋量是輸出信號的幅度包絡,而不是瞬時值。
四、 算法原理差異
PID 算法
PID 控制器根據當前誤差e(t)計算控制量:e(t)計算控制量:

比例 (P):快速響應當前誤差,但可能留有余差。
積分 (I):消除穩態誤差,但可能引起積分飽和。
微分 (D):預測誤差變化趨勢,增加阻尼,抑制振蕩。
PID 關注的是瞬時誤差,響應速度快,但要求系統模型相對明確或參數可整定。
AGC 算法
AGC 通常處理的是信號的幅度(或功率),屬于慢速平均控制:
檢測:將輸出信號的幅度(通常用峰值、均方根或對數)提取出來。
比較:檢測值與參考電平比較,得到誤差。
濾波/積分:誤差信號經過低通濾波或積分,產生增益控制信號。
調整增益:控制 VGA 的增益,使輸出幅度趨近參考值。
典型的模擬 AGC 環路就是一個積分器(相當于 PID 中的 I 項),而數字 AGC 常用比例 + 積分,很少使用微分,因為幅度變化通常是慢變的。
AGC 的關鍵是時間常數:
時間常數太短 → 會跟隨信號調制包絡,造成增益調制失真。
時間常數太長 → 對輸入幅度突變響應太慢,可能導致信號過載或失步。
五、 關鍵差異總結
| 維度 | PID | AGC |
|---|---|---|
| 誤差信號 | 瞬時值誤差 | 幅度平均值誤差 |
| 控制量 | 直接作用于執行機構(功率、位置等) | 控制可變增益元件的增益 |
| 響應速度 | 可快(ms級甚至μs級) | 通常較慢(需避讓信號調制) |
| 非線性處理 | 通常假設線性對象,有抗飽和機制 | 常工作在對數域(dB線性),以擴大動態范圍 |
| 穩定性 | 依賴對象模型,需整定參數 | 依賴環路增益和濾波器,通常設計為過阻尼 |
| 典型應用 | 位置、速度、溫度、壓力 | 無線接收機、音頻電平控制、光模塊 |
六、 兩者結合的情況
在某些復雜系統中,PID 和 AGC 可能同時出現,但作用層次不同。例如:
RF 功率放大器控制
用 AGC 穩定輸出功率(抵抗輸入功率變化和溫度漂移),同時內部用 PID 控制偏置電路的溫度補償。
電機伺服系統中的電流環
速度環/位置環用 PID,而電流環本質上是一個快速的“幅度控制”——它控制 PWM 占空比,使電機繞組電流跟隨指令值,這與 AGC 思路類似但響應極快,通常不叫 AGC。
光模塊中的激光器驅動
用 APC(自動功率控制,類似 AGC 原理)穩定平均光功率,同時用 PID 控制溫度(TEC 控制)。
七、 設計時的選擇思路
如果控制對象是機械、熱工、流體等,有慣性和延遲,且要求精確跟隨設定值→ 選擇 PID 或基于模型的控制。
如果對象是信號鏈路,輸入信號幅度變化劇烈,需要輸出幅度恒定,且允許一定的響應延遲→ 選擇 AGC。
如果既要快速響應又要幅度穩定(如某些突發通信系統)→ 可能需要前饋 + AGC 組合,或采用數字域快速歸一化算法。
審核編輯 黃宇
-
PID
+關注
關注
38文章
1504瀏覽量
91795
發布評論請先 登錄
君耀壓敏電阻KD14系列與KD14-X8系列對比分析指南

芯知識|為什么WT588F02A-16S錄放音語音芯片必須配備自動增益控制麥克風?

對比分析電能質量在線監測裝置支持的斷點續傳文件傳輸協議的優缺點

自動增益控制麥克風:WT588F02A-16S錄放音語音芯片提升音質的關鍵選擇

AES加密模式簡介與對比分析
基美通用貼片電容CAN18C系列與CAN18X系列的對比分析
泰克示波器MDO3000與MDO4000C采樣率對比分析

TaskPool和Worker的對比分析
PID串級控制在同步發電機勵磁控制中的應用
鎧裝光纜和一般光纜區別對比分析

國內外電機結構 工藝對比分析
主流汽車電子SoC芯片對比分析
過電壓保護器與氧化鋅避雷器之間-工作原理與作用對比分析
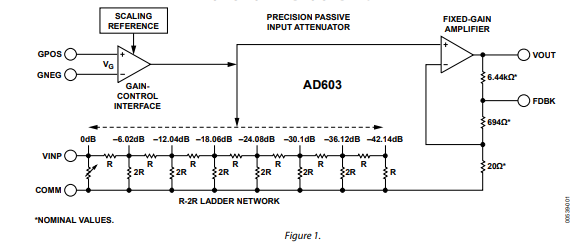
AD603低噪聲、90 MHz可變增益放大器技術手冊



 工商網監
工商網監
評論