") 差分霍爾+AGC+DSP的360°角度測量原理(NSM301x)
差分霍爾+AGC+DSP的360°角度測量原理(NSM301x)

NSM301x系列(NSM3011/3012/3013)是納芯微推出的 360°非接觸式磁角度傳感器 ,核心采用 差分霍爾陣列+自動增益控制(AGC)+數(shù)字信號處理(DSP+CORDIC) 架構(gòu),實現(xiàn)全溫域(-40℃~125℃)、強抗擾、高精度(±1°,校準后±0.2°)的旋轉(zhuǎn)角度測量。其核心價值在于:差分霍爾抑制共模雜散磁場、AGC自適應(yīng)補償磁場/溫度/安裝偏差、DSP完成矢量解算與角度輸出,完美適配BLDC電機、旋轉(zhuǎn)開關(guān)、閥門位置等工業(yè)與消費電子場景。
本文從 差分霍爾傳感原理、AGC自適應(yīng)機制、DSP矢量解算、系統(tǒng)架構(gòu)與工程實現(xiàn) 四大維度,系統(tǒng)解析NSM301x的360°角度測量技術(shù)方案。
核心技術(shù)架構(gòu)總覽
NSM301x采用“ 磁-電轉(zhuǎn)換→模擬調(diào)理→AGC自適應(yīng)→ADC采樣→DSP解算→多格式輸出 ”的全鏈路集成架構(gòu),核心模塊如下:
```mermaid
graph LR
A[兩極旋轉(zhuǎn)磁鐵] --> B[差分平面霍爾陣列
(SIN/COS雙路)]
B --> C[低噪聲放大+斬波穩(wěn)定]
C --> D[AGC自動增益控制]
D --> E[14位高速ADC]
E --> F[DSP+CORDIC算法]
F --> G[角度計算+分段擬合]
G --> H[多格式輸出
(DAC/PWM/SPI/UVW)]
I[MTP配置寄存器] --> D & F
J[電源/保護/診斷] --> 所有模塊
```
- 差分霍爾陣列 :生成正交SIN/COS磁場電壓信號,抑制共模干擾;
- AGC模塊 :自適應(yīng)調(diào)整信號增益,適配不同磁場強度與安裝公差;
- DSP+CORDIC :將SIN/COS數(shù)字量解算為0°~360°連續(xù)角度;
- MTP :存儲增益、零點、擬合參數(shù),支持在線配置。
差分霍爾傳感原理(360°磁場-電壓轉(zhuǎn)換核心)
3.1 平面霍爾與差分檢測機制
NSM301x內(nèi)置 平面差分霍爾元件陣列 ,而非傳統(tǒng)垂直霍爾,專門檢測 垂直于芯片表面(Z向) 的磁場分量:
1. 霍爾效應(yīng)基礎(chǔ) :通電霍爾元件在垂直磁場中,載流子受洛倫茲力偏轉(zhuǎn),產(chǎn)生 霍爾電壓 :
[
V_H = k_H cdot I cdot B_Z
]
其中,(k_H)為霍爾系數(shù),(I)為激勵電流,(B_Z)為Z向磁場強度。
2. 差分陣列布局 :芯片集成 兩組正交差分霍爾對 (SIN組、COS組),空間呈90°分布,對應(yīng)旋轉(zhuǎn)磁鐵的N/S極旋轉(zhuǎn):
- 當兩極磁鐵繞芯片中心旋轉(zhuǎn)時,SIN組輸出 正弦電壓 (V_{SIN}=Acdotsintheta);
- COS組輸出 余弦電壓 (V_{COS}=Acdotcostheta);
- (theta)為磁鐵旋轉(zhuǎn)角度(0°~360°),(A)為信號幅值(與磁場強度正相關(guān))。
3. 差分抑制共模干擾 :每組霍爾采用 差分對檢測 (+Hall與-Hall),外部雜散磁場(如電機定子磁場、電源干擾)為 共模信號 ,被差分結(jié)構(gòu)直接抑制(共模抑制比CMRR>80dB),僅保留目標旋轉(zhuǎn)磁場的差模信號。
3.2 360°角度與SIN/COS信號的映射關(guān)系
兩極磁鐵旋轉(zhuǎn)一周(360°),SIN/COS信號完成一個完整周期,且 嚴格正交 :
- 0°:(V_{SIN}=0),(V_{COS}=+A)(N極正對COS+);
- 90°:(V_{SIN}=+A),(V_{COS}=0)(N極正對SIN+);
- 180°:(V_{SIN}=0),(V_{COS}=-A)(S極正對COS+);
- 270°:(V_{SIN}=-A),(V_{COS}=0)(S極正對SIN+);
- 360°:回歸0°狀態(tài),信號連續(xù)無跳變,實現(xiàn) 絕對式360°測量 。
AGC自動增益控制(自適應(yīng)補償核心)
4.1 AGC設(shè)計需求
實際應(yīng)用中,信號幅值(A)會因 磁場強度變化(磁鐵退磁/溫度漂移)、安裝距離偏差(Z向間隙±0.5mm)、器件離散性 大幅波動,若直接采樣會導(dǎo)致ADC量程利用率低、角度誤差增大。NSM301x內(nèi)置 AGC模塊 ,核心目標: 將SIN/COS信號幅值自適應(yīng)調(diào)整至ADC滿量程的90%±5% ,最大化采樣精度。
4.2 AGC工作原理與流程
1. 幅值檢測 :DSP實時計算SIN/COS信號的 矢量幅值 :
[
A_{RMS} = sqrt{V_{SIN}^2 + V_{COS}^2}
]
2. 增益計算 :將(A_{RMS})與目標幅值(ADC滿量程×0.9)比較,通過PI閉環(huán)計算 增益系數(shù)G :
[
G = frac{目標幅值}{A_{RMS}}
]
3. 增益調(diào)整 :AGC模塊將G作用于模擬前端放大器, 動態(tài)調(diào)整放大倍數(shù) (默認16倍,范圍1~64倍),使調(diào)整后信號幅值穩(wěn)定在目標范圍。
4. 模式配置 :
- 自動AGC模式 :實時自適應(yīng),適配磁場/溫度/安裝變化;
- 固定增益模式 :通過MTP寄存器(AGC_FIX)配置固定增益,適用于磁場穩(wěn)定場景。
4.3 AGC核心優(yōu)勢
- 自適應(yīng)補償 :無需外部校準,自動適配不同磁鐵(100~500mT)與安裝公差;
- 提升精度 :使ADC滿量程利用率從<50%提升至>90%,角度分辨率提升1倍以上;
- 溫漂抑制 :結(jié)合芯片內(nèi)部斬波與自旋電流激勵技術(shù),角度溫漂<±0.3°/℃。
DSP+CORDIC角度解算(360°計算核心)
5.1 數(shù)字信號處理流程
AGC調(diào)整后的SIN/COS模擬信號,經(jīng) 14位高速ADC (采樣率≥1MHz)轉(zhuǎn)換為數(shù)字量(D_{SIN})、(D_{COS}),送入DSP進行矢量解算:
1. 數(shù)字濾波 :采用IIR低通濾波,抑制高頻噪聲(截止頻率可編程);
2. 正交校準 :修正SIN/COS信號的幅值失衡與相位偏差(非90°),通過MTP存儲校準系數(shù);
3. CORDIC算法解算 :核心步驟,將直角坐標((D_{SIN})、(D_{COS}))轉(zhuǎn)換為極坐標(幅值(R)、角度(theta))。
5.2 CORDIC算法原理(360°角度計算)
CORDIC(坐標旋轉(zhuǎn)數(shù)字計算)是NSM301x實現(xiàn) 無乘法器、高精度、低功耗 角度計算的核心,通過 迭代坐標旋轉(zhuǎn) 逼近目標角度:
1. 基本公式 :
[
theta = arctanleft(frac{D_{SIN}}{D_{COS}}right)
]
直接計算arctan需大量硬件資源,CORDIC通過 逐次逼近旋轉(zhuǎn) 實現(xiàn):
[
begin{cases}
x_{i+1} = x_i - y_i cdot d_i cdot 2^{-i} \
y_{i+1} = y_i + x_i cdot d_i cdot 2^{-i} \
z_{i+1} = z_i - d_i cdot arctan(2^{-i})
end{cases}
]
其中,(d_i=pm1)為旋轉(zhuǎn)方向,(i)為迭代次數(shù)(NSM301x采用16次迭代,精度達14位)。
2. 360°全范圍覆蓋 :
- 迭代初始值:(x_0=D_{COS}),(y_0=D_{SIN}),(z_0=0);
- 迭代結(jié)束后,(y_n≈0),(z_n)即為旋轉(zhuǎn)角度(theta)(0°~360°);
- 通過象限判斷((D_{SIN})、(D_{COS})正負),實現(xiàn) 0°~360°連續(xù)無盲區(qū) 測量。
5.3 分段擬合與精度提升
NSM301x支持 四段分段擬合 ,對CORDIC輸出的原始角度進行非線性校準,進一步提升精度:
- 原始角度誤差:±1°(全溫域);
- 四段擬合后:誤差降至 ±0.2° ,滿足高精度場景需求;
- 擬合參數(shù)存儲于MTP,支持在線寫入與校準。
系統(tǒng)輸出與工程實現(xiàn)
6.1 多格式角度輸出
DSP解算后的角度數(shù)據(jù),可配置為多種輸出形式,適配不同系統(tǒng)接口:
| 輸出類型 | 分辨率 | 特性 | 應(yīng)用場景 |
| :--- | :--- | :--- | :--- |
| 14位DAC模擬電壓 | 0.022°/LSB | 0~VDD線性輸出 | 直接接入MCU ADC |
| 12位PWM | 0.088°/LSB | 頻率可編程 | 低成本數(shù)字接口 |
| SPI數(shù)字 | 14位 | 高速同步傳輸 | 工業(yè)總線控制 |
| UVW | 6位 | 電機換相信號 | BLDC電機驅(qū)動 |
6.2 關(guān)鍵工程參數(shù)與性能
- 供電電壓 :3.3V/5V(雙版本);
- 工作溫度 :-40℃~125℃;
- 角度精度 :±1°(默認),±0.2°(四段擬合);
- 響應(yīng)速度 :<100μs(高速旋轉(zhuǎn)適配);
- 抗擾能力 :共模磁場抑制>80dB,EMC符合CISPR 22 Class B;
- 封裝 :SOP-8,小型化適配緊湊空間。
6.3 典型應(yīng)用:BLDC電機轉(zhuǎn)子位置檢測
NSM301x直接貼裝于電機端蓋,與轉(zhuǎn)子末端兩極磁鐵配合,輸出UVW或SPI角度信號,替代傳統(tǒng)霍爾傳感器:
- 無傳感器FOC控制:提供高精度轉(zhuǎn)子位置(誤差<0.5°),提升電機效率與靜音性;
- 高速適配:支持120kr/min以上轉(zhuǎn)速,滿足吸塵BLDC馬達需求;
- 抗振可靠:差分結(jié)構(gòu)+灌封工藝,耐受10~20g振動,適配車載/工業(yè)場景。
技術(shù)優(yōu)勢與對比
| 技術(shù)方案 | 差分霍爾+AGC+DSP(NSM301x) | 傳統(tǒng)單端霍爾 | 光電編碼器 |
| :--- | :--- | :--- | :--- |
| 測量范圍 | 360°絕對式 | 180°(需補極) | 增量式(需歸零) |
| 抗擾性 | 極強(差分抑制共模) | 弱(易受雜散磁場干擾) | 弱(易受粉塵/油污影響) |
| 精度 | ±0.2°(校準后) | ±3°~±5° | ±0.1°(高成本) |
| 溫漂 | <±0.3°/℃ | >±1°/℃ | <±0.1°/℃ |
| 成本 | 中 | 低 | 高 |
| 體積 | 極小(SOP-8) | 小 | 大 |
總結(jié)與應(yīng)用前景
NSM301x通過 差分霍爾陣列 實現(xiàn)強抗擾磁場采集、 AGC自適應(yīng) 補償系統(tǒng)偏差、 DSP+CORDIC 完成360°高精度角度解算,構(gòu)建了一套“高可靠、高精度、小型化、低成本”的非接觸式角度測量方案。其核心突破在于:
1. 差分結(jié)構(gòu)徹底解決雜散磁場干擾問題,適配電機等強磁場景;
2. AGC+分段擬合實現(xiàn)全溫域、全工況下的高精度輸出;
3. 單芯片集成所有功能,簡化系統(tǒng)設(shè)計,降低BOM成本。
該方案已廣泛應(yīng)用于 吸塵BLDC馬達、汽車電子(節(jié)氣門/換擋器)、工業(yè)閥門、旋轉(zhuǎn)開關(guān) 等領(lǐng)域,未來隨著GaN/SiC電機與機器人技術(shù)發(fā)展,NSM301x的高速、高精度特性將進一步釋放價值,成為360°角度測量的主流方案。
需要我基于本文補充一份 NSM301x 與 MCU 對接的 SPI 通信協(xié)議與角度讀取例程 (含寄存器配置、數(shù)據(jù)解析與校準步驟)嗎?
審核編輯 黃宇
-
dsp
+關(guān)注
關(guān)注
561文章
8258瀏覽量
367204 -
AGC
+關(guān)注
關(guān)注
0文章
171瀏覽量
53620
發(fā)布評論請先 登錄
高壓差分探頭±1500V 測量范圍怎么理解?


高壓差分探頭±1500V測量范圍詳解
車規(guī)級精準感知——國產(chǎn)NSM1011單極霍爾開關(guān)深度解析
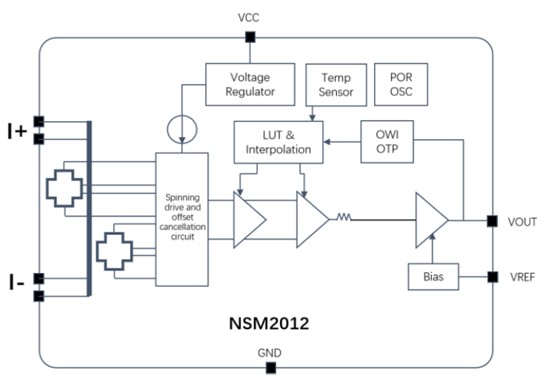
一文了解NSM2012:霍爾效應(yīng)電流傳感器

一文了解NSM2012:霍爾效應(yīng)電流傳感器
駕馭高壓差分測量:為現(xiàn)代功率電子研發(fā)保駕護航
??高壓差分探頭:高電壓測量的精密之眼??
高壓差分探頭:精準測量高電壓系統(tǒng)的關(guān)鍵技術(shù)
高壓差分探頭:高壓電子測量的精準利器
差分探頭輸入范圍解析——正確測量的核心前提

差分探頭能測那些信號呢?
品致示波器高壓差分探頭的了解及常見測量方法

差分探頭:精準測量,開啟電子測試新紀元




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論