") 基于 MCU 的掃地機器人驅(qū)動板開發(fā)與應(yīng)用
基于 MCU 的掃地機器人驅(qū)動板開發(fā)與應(yīng)用

掃地機器人的自主移動與作業(yè)性能,核心依賴驅(qū)動板的精準(zhǔn)控制能力。MCU(微控制單元)作為驅(qū)動板的 “運算核心”,承擔(dān)著指令解析、電機驅(qū)動、傳感反饋處理、安全保護等關(guān)鍵任務(wù),其選型與編程直接決定驅(qū)動板的響應(yīng)速度、控制精度與穩(wěn)定性。
本文以主流兩輪差速掃地機器人為研究對象,詳細介紹基于 MCU 的驅(qū)動板開發(fā)流程,包括硬件架構(gòu)設(shè)計、軟件算法實現(xiàn)及實際應(yīng)用驗證,為智能家居硬件開發(fā)提供技術(shù)參考。
二、驅(qū)動板硬件開發(fā):MCU 為核心的架構(gòu)設(shè)計
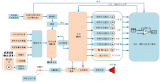
驅(qū)動板硬件開發(fā)遵循 “高集成、低功耗、抗干擾” 原則,以 MCU 為核心搭建 “主控 - 驅(qū)動 - 傳感 - 電源” 四層架構(gòu),確保各模塊協(xié)同高效工作。
(一)MCU 選型與核心配置
結(jié)合掃地機器人驅(qū)動需求,還要選型主控芯片,其核心優(yōu)勢的:
內(nèi)核性能:ARM Cortex-M0 + 架構(gòu),主頻 64MHz,支持單周期乘法運算,滿足實時 PID 控制需求;
存儲與外設(shè):128KB Flash+36KB RAM,集成 2 個 12 位 ADC、4 個通用定時器、2 個 UART、1 個 I2C 接口,適配多傳感器數(shù)據(jù)采集與通信需求;
功耗與可靠性:工作電壓 2.0V~3.6V,待機功耗低至 0.5μA,支持 - 40℃~85℃寬溫工作,適配復(fù)雜環(huán)境。
MCU 外圍電路設(shè)計重點:
電源電路:通過將 5V 轉(zhuǎn)換為 3.3V,為 MCU 提供穩(wěn)定供電,搭配 100nF 陶瓷電容與 10μF 電解電容抑制紋波;
時鐘與復(fù)位:采用 8MHz 外部晶振,配合片內(nèi) PLL 倍頻至 64MHz,配置獨立看門狗(IWDG)防止程序跑飛;
通信接口:UART1(波特率 115200bps)連接導(dǎo)航板,UART2 預(yù)留擴展接口,I2C 接口對接姿態(tài)傳感器。
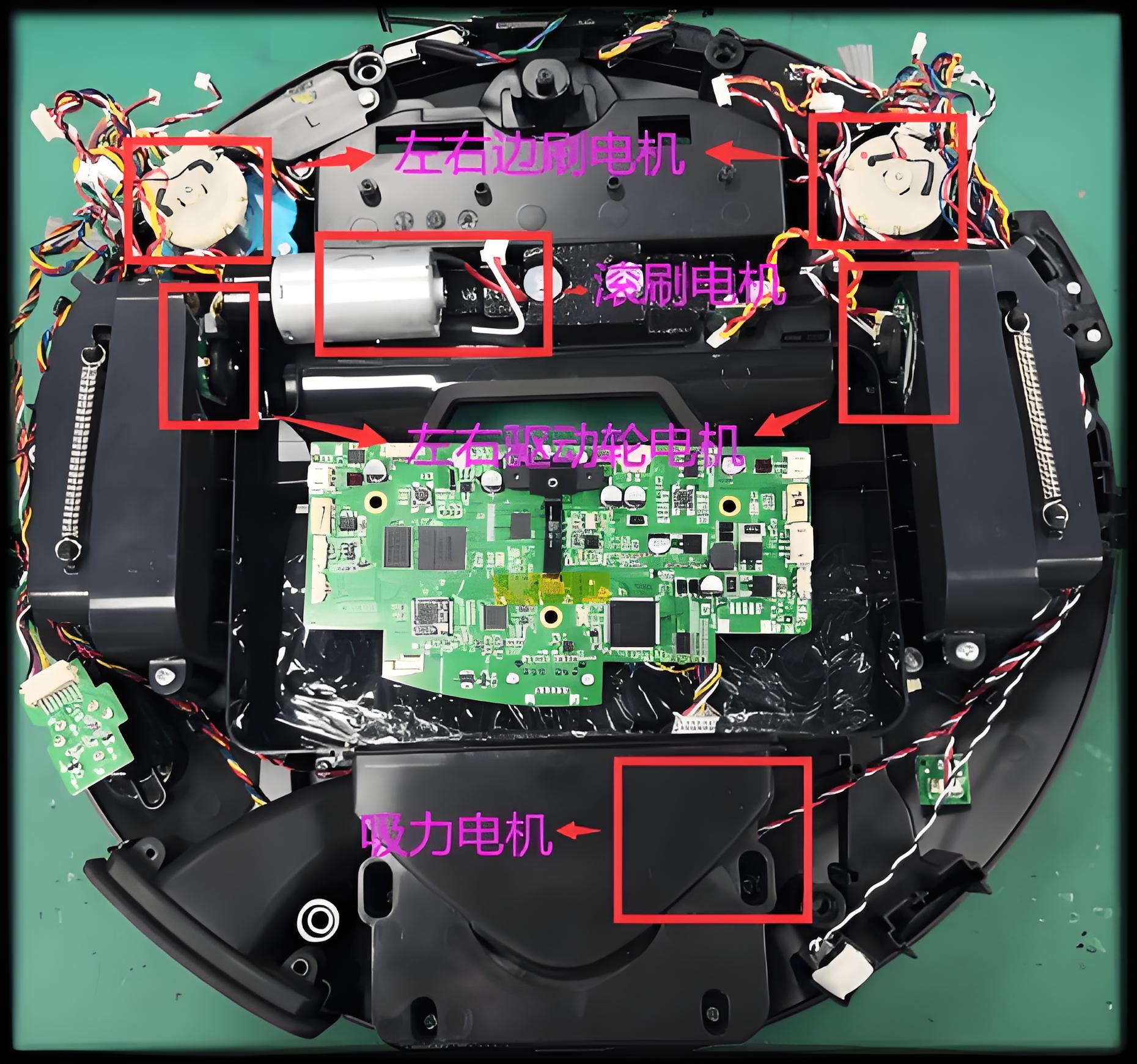
(二)核心硬件模塊開發(fā)
電機驅(qū)動模塊:選用集成預(yù)驅(qū)功能的艾畢勝的瑞盟芯片,支持雙路 H 橋驅(qū)動,適配 12V/18V 無刷直流電機(BLDC)。MCU 通過 PWM 信號控制電機轉(zhuǎn)速,頻率設(shè)置為 25kHz,死區(qū)時間 2μs,避免上下橋臂直通。功率輸出端采用 AO3400 MOS 管,導(dǎo)通電阻≤80mΩ,降低導(dǎo)通損耗,搭配 RC 吸收回路(100Ω+10nF)抑制關(guān)斷尖峰。
傳感反饋模塊:
轉(zhuǎn)速反饋:采用 1000 線 ABZ 增量編碼器,通過 MCU 定時器捕獲脈沖信號,計算電機轉(zhuǎn)速與行走距離,誤差≤2%;
電流檢測:在電機回路串聯(lián) 10mΩ 采樣電阻,經(jīng) LMV358 運算放大器放大后輸入 ADC,實現(xiàn)過流保護(閾值 2.5A)與負載監(jiān)測;
姿態(tài)感知:通過 I2C 接口連接 MPU6050 六軸 IMU,采集角速度與加速度數(shù)據(jù),補償編碼器累計誤差。
電源管理模塊:采用納芯微電子 降壓芯片將 14.4V 電池電壓轉(zhuǎn)換為 5V,輸出電流 3A,效率≥90%;搭配 DW01 + 電池保護芯片,實現(xiàn)過充、過放、短路保護,保障續(xù)航與安全。
(三)PCB 設(shè)計與抗干擾優(yōu)化
PCB 布局遵循 “功率與信號分離” 原則:
功率回路(電機驅(qū)動、MOS 管)采用寬銅箔(≥2mm),縮短電流路徑;信號回路(MCU、傳感器)遠離功率器件,減少電磁干擾;
接地設(shè)計:模擬地與數(shù)字地通過 0Ω 電阻單點連接,電流采樣電阻靠近 MOS 管放置,降低地電位差;
濾波設(shè)計:電源輸入端配置 π 型濾波(10μH 電感 + 100μF 電解電容 + 0.1μF 陶瓷電容),編碼器信號端串聯(lián) 100Ω 電阻抑制反射。
三、驅(qū)動板軟件實現(xiàn):基于 MCU 的控制算法開發(fā)
軟件開發(fā)基于 FreeRTOS 實時操作系統(tǒng),采用分層架構(gòu)設(shè)計,實現(xiàn) “指令解析 - 運動控制 - 反饋調(diào)整 - 安全保護” 的閉環(huán)邏輯。
(一)軟件架構(gòu)分層
底層驅(qū)動層:封裝 MCU 外設(shè)驅(qū)動,包括 GPIO、TIM、ADC、UART、I2C 等模塊,提供標(biāo)準(zhǔn)化接口函數(shù),降低上層開發(fā)復(fù)雜度;
算法層:核心算法包括差速轉(zhuǎn)向控制、PID 速度閉環(huán)、姿態(tài)解算、安全保護邏輯,是實現(xiàn)精準(zhǔn)運動的關(guān)鍵;
應(yīng)用層:處理導(dǎo)航板指令、狀態(tài)上報、模式切換等業(yè)務(wù),任務(wù)優(yōu)先級排序為:故障保護>轉(zhuǎn)速閉環(huán)>指令接收>狀態(tài)上報。
(二)核心算法實現(xiàn)
指令解析與運動學(xué)建模:MCU 通過 UART 接收導(dǎo)航板下發(fā)的目標(biāo)速度(0-0.5m/s)、轉(zhuǎn)向角度(-180°~+180°)等指令,基于兩輪差速模型分解為左右輪目標(biāo)轉(zhuǎn)速:
直行:(V_L = V_R = V_{target})
轉(zhuǎn)向:(V_L = V_{target} times (1 - frac{Deltatheta times W}{2pi R})),(V_R = V_{target} times (1 + frac{Deltatheta times W}{2pi R}))
其中(W)為輪距(300mm),(R)為轉(zhuǎn)向半徑。
PID 速度閉環(huán)控制:采用增量式 PID 算法,實時修正電機轉(zhuǎn)速偏差:
(Delta U(k) = K_P[e(k)-e(k-1)] + K_I e(k) + K_D[e(k)-2e(k-1)+e(k-2)])
經(jīng)實驗整定參數(shù)(K_P=0.7)、(K_I=0.15)、(K_D=0.08),轉(zhuǎn)速波動率控制在 ±3% 以內(nèi),確保勻速行走。
姿態(tài)解算與誤差補償:通過卡爾曼濾波融合 IMU 的角速度與加速度數(shù)據(jù),解算機器人姿態(tài)角,補償編碼器累計誤差,將轉(zhuǎn)向精度提升至 ±1° 以內(nèi)。
安全保護邏輯:
堵轉(zhuǎn)保護:電機電流超 2.5A 且持續(xù) 0.5s,立即關(guān)閉 PWM 輸出,延時 1s 后嘗試反向脫困;
過溫保護:通過 NTC 傳感器監(jiān)測 MOS 管溫度,超 85℃時降額運行,超 95℃停機;
欠壓保護:電池電壓低于 10.8V 時,觸發(fā)低電量預(yù)警并停止作業(yè)。
四、開發(fā)驗證與實際應(yīng)用
(一)功能與性能測試
搭建測試平臺驗證驅(qū)動板性能,測試結(jié)果如下:
速度控制:0.05-0.5m/s 可調(diào),穩(wěn)態(tài)誤差≤±0.02m/s;
轉(zhuǎn)向精度:原地旋轉(zhuǎn) 360°,角度偏差≤±0.9°;
響應(yīng)速度:指令接收至電機啟動延遲≤8ms;
續(xù)航能力:14.4V/5000mAh 電池,持續(xù)運行時間≥2.5 小時;
環(huán)境適應(yīng)性:-10℃~60℃工作正常,抗 5000V 靜電干擾。
(二)實際應(yīng)用場景
該驅(qū)動板已成功應(yīng)用于家用掃地機器人產(chǎn)品,適配以下場景:
日常清潔:通過精準(zhǔn)差速轉(zhuǎn)向?qū)崿F(xiàn)全屋覆蓋清掃,直線行走偏差≤2cm/m;
復(fù)雜地形:自適應(yīng)地毯、地板等不同地面,通過電流反饋調(diào)整電機功率,爬坡角度≥15°;
智能交互:支持通過 APP 設(shè)置清潔模式(沿邊、定點、全屋),驅(qū)動板實時響應(yīng)模式切換指令;
故障自診斷:出現(xiàn)堵轉(zhuǎn)、過溫等故障時,通過 UART 上報故障信息,便于用戶排查。
基于MCU 的智能掃地機器人驅(qū)動板開發(fā),核心在于硬件架構(gòu)的模塊化設(shè)計與軟件算法的閉環(huán)優(yōu)化。STM32 系列 MCU 憑借高性價比、豐富外設(shè)與低功耗特性,成為驅(qū)動板的理想主控選擇,其強大的運算能力支撐了 PID 控制、姿態(tài)解算等復(fù)雜算法的實時運行。實際應(yīng)用表明,該驅(qū)動板在控制精度、穩(wěn)定性與功耗方面均滿足設(shè)計要求,適配家用掃地機器人的復(fù)雜作業(yè)場景。
隨著 MCU 集成度的提升與 AI 算法的融入,驅(qū)動板將實現(xiàn)更智能的自適應(yīng)控制,例如基于地面材質(zhì)自動調(diào)整電機功率、通過視覺與 IMU 融合提升定位精度,進一步推動掃地機器人向 “更高效、更智能、更可靠” 方向發(fā)展。
審核編輯 黃宇
-
mcu
+關(guān)注
關(guān)注
147文章
18974瀏覽量
399517 -
機器人
+關(guān)注
關(guān)注
213文章
31147瀏覽量
222647
發(fā)布評論請先 登錄
掃地機器人“叛變”了
五年磨一劍,大疆終于官宣ROMO掃地機器人

智能掃地機器人驅(qū)動板接口定義與調(diào)試方法-技術(shù)性篇(艾畢勝電子)
掃地機器人驅(qū)動板系統(tǒng)設(shè)計與功能實現(xiàn)-艾畢勝電子
解鎖掃地機器人“類人智能”的時鐘密鑰

INDEMIND臟污識別技術(shù)賦能掃地機器人功能進化
掃地機器人的幾種語音控制芯片方案介紹
基于上海貝嶺產(chǎn)品的掃地機器人應(yīng)用方案
基于東芝產(chǎn)品的掃地機器人設(shè)計方案

低成本智能化:藍牙模塊方案讓平價掃地機更便捷

中微半導(dǎo)掃地機器人解決方案介紹

如何提升掃地機器人動力系統(tǒng)性能
掃地機器人EMC整改:傳統(tǒng)方法VS新技術(shù)的高效解決方案



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論