 高壓放大器如何成為介電彈性體驅動的能量心臟
高壓放大器如何成為介電彈性體驅動的能量心臟

介電彈性體被譽為有前途的“人工肌肉”材料,其工作原理類似于三明治結構:上下兩層柔性電極,中間夾著一層高分子彈性體薄膜。當通過高壓放大器對電極施加電壓時,正負電荷在上下表面積累,產生的靜電力擠壓彈性體薄膜,使其在厚度方向壓縮、平面方向擴張,從而產生形變。
在介電彈性體的驅動鏈條中,高壓放大器扮演著無可替代的“能量倍增器”與“波形守護者”角色。
它是電壓的“倍增器”。信號發生器或控制器輸出的控制信號通常只有幾伏,而介電彈性體需要數十至數千伏的驅動電壓才能產生有效形變。西安安泰電子的ATA-7000系列高壓放大器,單端輸出可達40kVp-p(±20kVp),能夠滿足從基礎研究到極端條件測試的各類需求。在典型的介電彈性體驅動實驗中,信號源輸出正弦波,經高壓放大器放大至0-1500V后,施加于電活性聚合物表面,使其產生規律性的收縮形變。
它是波形的“守護者”。介電彈性體的動力學研究要求驅動信號的頻率、幅值和波形高度精確。高性能高壓放大器具備高保真放大特性,能忠實還原任意波形——無論是正弦波、三角波、方波還是復雜的掃頻信號。在偏置型多層介電彈性體驅動器的動態性能測試中,研究人員通過高壓放大器施加調幅方波信號和正弦掃頻信號,成功捕捉到驅動器在16Hz基頻和32Hz倍頻下的響應特性,為驅動系統的優化控制提供了關鍵數據。
它是負載的“駕馭者”。介電彈性體呈現典型的容性負載特性,其阻抗隨頻率和形變狀態變化。先進的高壓放大器具備四象限有源輸出能力,可在整個輸出電壓范圍內將電流吸收或輸出到電抗性或電阻性負載中,對于實現準確的輸出響應和各種負載所需的高轉換速率至關重要。
案例縱覽:高壓放大器驅動的介電彈性體應用前沿

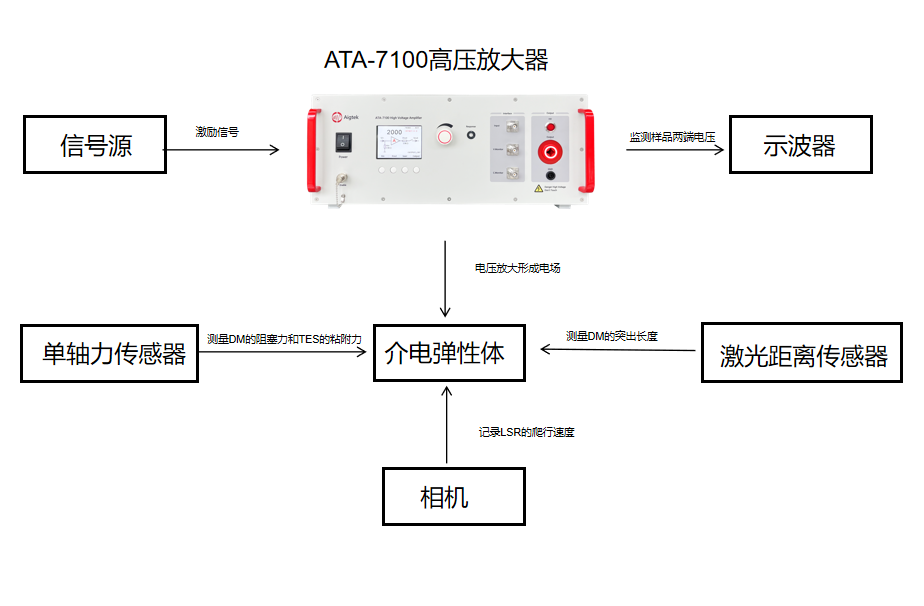
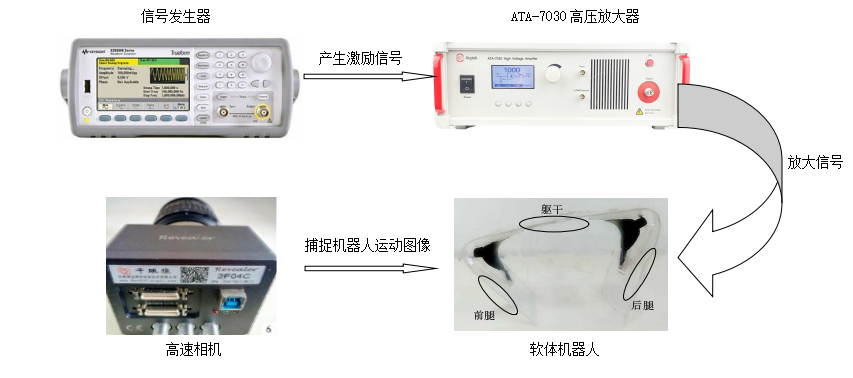
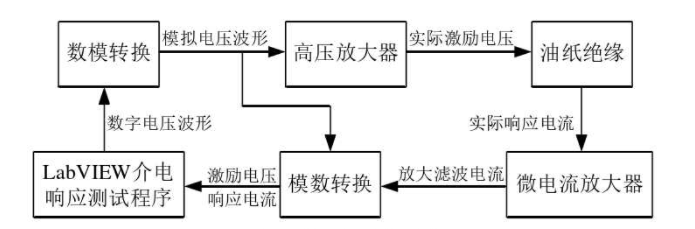
圖:高壓放大器在介電彈性體驅動器性能測試中的應用
多層驅動器性能測試:揭示“蝶形遲滯”的微觀奧秘
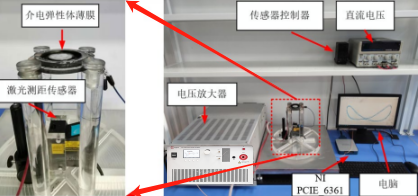
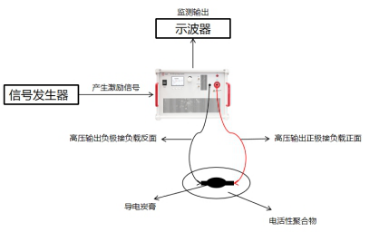
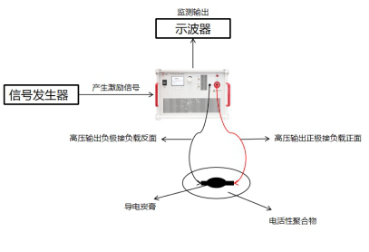
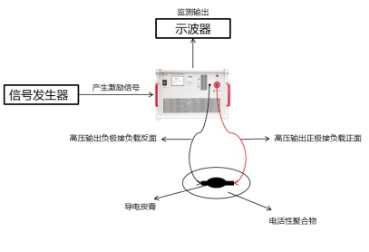
在介電彈性體驅動器的性能測試研究中,研究人員搭建了包含信號發生器、高壓放大器、激光位移傳感器和數據采集系統的完整測試平臺。測試對象為介電彈性體膜,兩側涂覆碳導電油脂作為柔性電極。
實驗結果顯示,當正弦驅動電壓幅值從3.5kV增至4.5kV時,介電彈性體驅動器的輸出位移顯著增大,輸入輸出響應曲線呈現出與剛性智能材料截然不同的“雙回路蝶形遲滯”現象,且在不同電壓幅值下呈現非線性變化。這一發現為建立精確的驅動器控制模型、開發遲滯補償算法提供了關鍵實驗依據。
純剪切形變驅動器:實現單向往復的精準驅動
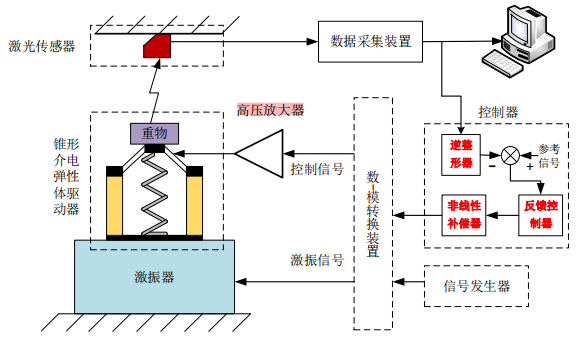
為研究人員提出了一種新型介電彈性體驅動器,由彈簧和可產生純剪切形變的介電彈性體組成。在實驗中,ATA-7050高壓放大器將驅動電壓逐步提升,直至材料被擊穿,同時激光位移傳感器和壓力傳感器實時記錄伸長量與驅動力數據。
當通入4kV電壓后,驅動器的長度顯著增加,與靜止狀態形成鮮明對比。由于外殼上彈簧的存在,介電彈性體薄膜的恢復力與彈簧彈力在驅動方向上維持動態平衡;當電壓施加后,麥克斯韋應力打破平衡,驅動器發生位移并在新位置達到新的平衡。這種設計為柔性爬行機器人的驅動提供了理想的“肌肉單元”。
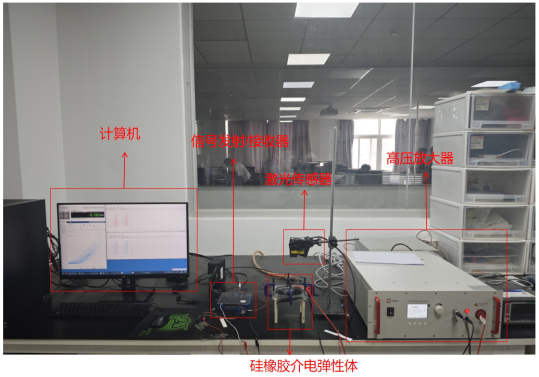
圖:介電彈性體性能研究
硅橡膠伸縮控制:波形一致的“電-機械”轉換驗證
在硅橡膠介電彈性體材料伸縮控制系統實驗中,研究人員使用計算機編輯任意波形,經函數發生器輸出后,通過高壓放大器放大至2kVp-10kVp,驅動材料伸縮運動。激光傳感器捕捉材料的伸縮運動幅度波形,并將數據回傳至計算機。
實驗結果令人振奮:材料呈現出明顯的周期性伸張和收縮,計算機上觀察到的輸出波形與伸縮運動幅度波形完全一致。這一完美對應關系,驗證了高壓放大器在將電信號轉換為機械運動過程中的高保真特性,為后續的精密控制應用奠定了堅實基礎。
在上述前沿應用中,國產高壓放大器正扮演著日益關鍵的角色。西安安泰電子的ATA-7000系列高壓放大器以40kVp-p最大輸出電壓、DC至數kHz帶寬的優異性能,廣泛應用于介電彈性體測試、電活性聚合物研究、軟體機器人驅動等領域。
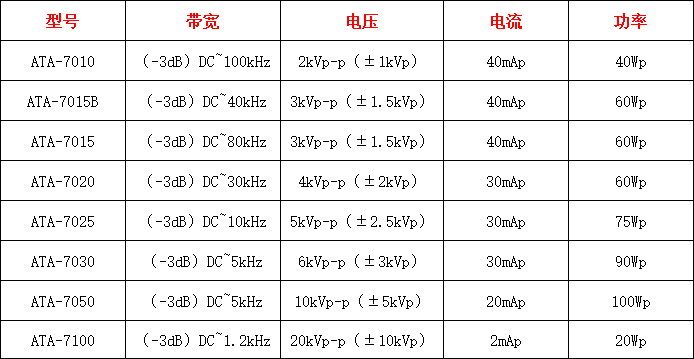
圖:ATA-7000系列高壓放大器指標參數
從百伏驅動到千伏級測試,從仿生機器魚到智能假肢——每一次介電彈性體的精準形變與收縮,都始于高壓放大器那一次精密的能量注入。它讓柔軟的“人工肌肉”得以激活,讓無聲的機械運動成為可能,為柔性機器人時代注入了源源不斷的“能量之心”。
-
信號發生器
+關注
關注
28文章
1708瀏覽量
113482 -
高壓放大器
+關注
關注
4文章
802瀏覽量
15932
發布評論請先 登錄
高壓放大器在介電彈性體制成的軟機器人研究中的應用

ATA-7050B高壓放大器手冊
ATA-7030高壓放大器手冊
ATA-7025高壓放大器手冊
ATA-7015B高壓放大器手冊
介電彈性體軟機器人研究:高壓放大器的應用實踐

看視頻答題抽好禮 | 功率放大器應用知多少?線上有獎問答等你來戰!
安泰電子ATA-7030高壓放大器在介電領域研究中的應用(合集)
安泰高壓放大器在錐形介電彈性體隔振性能驗證中的應用



 工商網監
工商網監
評論