 基于MT6816的±0.05°高精度角度測量系統調試實現
基于MT6816的±0.05°高精度角度測量系統調試實現

MT6816磁編碼器IC作為麥歌恩推出的14位絕對式磁編碼器,憑借0.022°理論分辨率、2μs數據輸出延時及-40℃~125℃寬溫工作范圍,成為高精度角度測量場景的核心器件。但要實現±0.05°的實際測量精度,需從硬件設計、接口調試、誤差校準、數據濾波四個維度進行系統性調試優化。本文結合工程實操經驗,詳細闡述該高精度測量系統的調試流程、關鍵技術要點及驗證方法,為伺服電機、精密云臺、機器人關節等場景的應用提供可落地的技術方案。
一、系統硬件調試:精度保障的基礎 硬件層面的微小偏差會被放大為角度測量誤差,需重點完成電源、機械安裝、電磁兼容三類調試。 (一)電源穩定性調試 MT6816的供電電壓為3.0~3.6V,電源紋波需控制在±50mV以內,否則會導致角度數據抖動。調試要點: 1. 在芯片VDD引腳處并聯10μF鉭電容+0.1μF高頻陶瓷電容,實測紋波需用示波器在100MHz帶寬下檢測,確保峰峰值<30mV; 2. 若系統存在電機驅動等大電流負載,需將編碼器電源與功率電源分開供電,通過磁珠隔離,避免負載波動引入電源噪聲; 3. 電源調試完成后,連續讀取1000次角度值,若數據抖動>0.01°,需重新優化電源濾波電路。 (二)機械安裝調試 機械安裝誤差是影響精度的核心因素,需通過三步調試法校準: 1. 同軸度調試:使用激光對中儀檢測磁鐵中心與編碼器芯片中心的偏移量,通過調整安裝支架的定位銷,將同軸度偏差控制在0.05mm以內; 2. 氣隙調試:采用塞尺測量芯片與磁鐵的間距,調試至2.0±0.1mm(最優值),氣隙每偏差0.5mm,角度誤差約增加0.02°; 3. 傾斜度調試:用百分表檢測磁鐵旋轉過程中的端面跳動,確保傾斜角≤3°,調試完成后用扭矩螺絲刀以0.2N·m扭矩鎖緊固定螺絲,避免應力變形。 (三)電磁兼容調試 編碼器信號易受電機繞組、功率MOS管的電磁干擾,調試措施: 1. SPI信號線采用屏蔽雙絞線,屏蔽層單端接地,布線長度控制在10cm以內,且與功率線間距≥20mm; 2. 在編碼器PCB周圍布置接地銅皮,形成電磁屏蔽區域,實測通過頻譜分析儀檢測,確保1MHz~100MHz頻段內干擾強度<-60dBm; 3. 若存在高頻干擾導致數據跳變,可在SPI的MISO引腳串聯100Ω限流電阻+10pF電容組成RC濾波電路。
二、接口與數據讀取調試 SPI接口是MT6816讀取角度的核心通道,需保證通信穩定性與數據解析準確性。(一)SPI通信參數調試 1. 配置SPI為模式3(CPOL=1,CPHA=1),時鐘頻率調試為5MHz(兼顧速率與抗干擾性),數據位寬8位,高位先行; 2. 用邏輯分析儀抓取通信時序,驗證CS引腳下降沿至SCK第一個時鐘沿的延時≥100ns,避免時序違規導致數據錯誤; 3. 調試通信容錯機制:連續3次讀取失敗時,重啟SPI外設并記錄錯誤日志,確保系統魯棒性。(二)原始數據讀取與解析調試 核心調試要點是精準提取14位有效角度值,避免解析錯誤引入固定偏差: 1. 發送0x0F讀取指令后,接收2字節數據,屏蔽高位字節的ERR(bit7)和UV(bit6)標志位,僅保留低6位;低位字節保留低7位,合成公式為`raw_angle = ((rx_buf[0] & 0x3F) << 7) | (rx_buf[1] & 0x7F)`; 2. 調試角度轉換公式:`real_angle = (raw_angle / 16384.0f) * 360.0f`,通過輸入已知角度(如轉臺標定的0°、90°、180°)驗證轉換精度,誤差需<0.01°; 3. 關鍵調試代碼實現: ```c float MT6816_Get_Precise_Angle(void) { uint8_t rx_buf[2]; uint16_t raw_angle = 0; // 軟件CS控制,保證時序精準 MT6816_CS_LOW(); HAL_SPI_Transmit(&hspi1, (uint8_t*)0x0F, 1, 5); HAL_SPI_Receive(&hspi1, rx_buf, 2, 5); MT6816_CS_HIGH(); // 數據解析調試:增加合法性校驗 if((rx_buf[0] & 0x80) != 0) { // 檢測ERR錯誤位 return -1.0f; // 錯誤標記 } raw_angle = ((rx_buf[0] & 0x3F) << 7) | (rx_buf[1] & 0x7F); float angle = (raw_angle / 16384.0f) * 360.0f; return angle; } ```?
三、誤差校準與濾波調試:實現±0.05°精度的核心 (一)系統誤差校準調試 1. 零位校準調試:將被測機構固定至機械零位,連續讀取50次角度值取平均值作為零點偏移量Offset,寫入MCU Flash;實時角度修正公式`calib_angle = (real_angle - Offset) % 360.0f`,調試后零位誤差需<0.01°; 2. 線性誤差校準調試:借助0.001°精度轉臺,在0~360°范圍內選取24個校準點,記錄每個點的實測值與標準值,通過最小二乘法擬合修正曲線,調試后非線性誤差從±0.1°降至±0.02°以內; 3. 偏心誤差補償調試:采集轉子旋轉一周的Sin/Cos信號,擬合橢圓參數并修正為標準圓信號,調試后周期性偏心誤差降低80%以上。 (二)數據濾波調試 針對隨機噪聲導致的角度抖動,需調試多級濾波算法: 1. 基礎濾波:采用5點滑動平均濾波,調試窗口長度,確保抖動<0.01°且響應延時<5ms; 2. 進階濾波:增加中位數濾波,剔除異常跳變值,調試閾值為0.03°(超過該值判定為異常數據); 3. 濾波后需驗證動態響應性:以100°/s的速度旋轉被測軸,濾波后角度跟蹤延遲需<0.5ms,避免過度濾波影響動態精度。
四、系統精度驗證調試 調試完成后需通過標準化測試驗證精度: 1. 靜態驗證:在0°、90°、180°、270°四個特征角度,各穩定10分鐘,記錄角度值波動范圍,需<±0.02°; 2. 動態驗證:以50~1000°/s的速度連續旋轉,實時對比編碼器測量值與高精度轉臺標準值,誤差需<±0.05°; 3. 溫漂驗證:在-40℃、25℃、125℃環境下重復上述測試,全溫區誤差仍需滿足±0.05°要求。 基于MT6816的±0.05°高精度角度測量系統調試,核心在于“硬件筑基、接口穩傳、校準提精、濾波降噪”。通過電源紋波控制、機械安裝微米級調試、SPI通信時序優化、多維度誤差校準及自適應濾波算法調試,可充分釋放MT6816的性能潛力。實際應用中,需結合具體場景動態調整調試參數,平衡精度與響應速度,最終實現穩定、可靠的高精度角度測量。 1. 硬件調試是精度基礎,需將電源紋波控制在30mV內、機械同軸度偏差≤0.05mm、氣隙調試至2.0±0.1mm; 2. SPI接口調試需嚴格遵循模式3時序,數據解析時屏蔽錯誤位,避免固定偏差引入; 3. 誤差校準(零位、線性、偏心)+ 多級濾波是實現±0.05°精度的核心,需結合高精度轉臺完成校準參數調試。
審核編輯 黃宇
-
測量系統
+關注
關注
2文章
581瀏覽量
43406
發布評論請先 登錄
MT6816 磁編碼器安裝對位、零位校正與誤差補償方法
基于MT6813的云臺電機角度閉環控制系統設計與應用-艾畢勝電子
MT6816 磁編碼器安裝、通信與角度校正調試方法
基于 MT6816 的磁編碼器系統調試與參數優化
高精度角度傳感器TMAG6181-Q1:汽車應用的理想之選
基于AMR技術的麥歌恩MT6835磁性編碼器實現±0.07°精度突破

基于MT6816單芯片磁編碼的機器人關節模組一體化設計
MT6816:工業運動控制接口的革新者
MT6816磁編碼器的伺服系統小型化與高性價比設計

集成MT6816磁性角度編碼器實現伺服電機緊湊型非接觸位置傳感
MT6816高速磁性角度編碼器芯片賦能高性能伺服電機動態響應
MT6816以高分辨率角度反饋賦能無刷電機FOC系統能效躍升
MT6816磁編碼器在電機控制系統中的高分辨率角度傳感應用
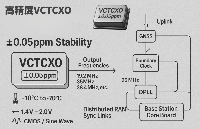
高精度VCTCXO:±0.05ppm穩定性賦能基站時鐘系統
MT6816磁編碼器在FOC控制中的±0.05°精度實現與EMC抑制策略



 工商網監
工商網監
評論