 突破三重質量挑戰,守住人形機器人動作精確性與壽命
突破三重質量挑戰,守住人形機器人動作精確性與壽命

當前,人形機器人關節模組正朝著高度集成化演進:諧波、行星、擺線以及絲杠等多種傳動形式被壓縮進更小的空間內。關節越緊湊,傳動部件越精密,對質量的敏感度就越高,因為傳動部件決定了動力如何被穩定、可控地傳遞為機器人關節的角度與位移。
傳動部件這0.001mm的誤差,會讓機器人的動作差多少、壽命掉多少?
探索人形機器人
精準動作背后的質量奧秘


▲ 人形機器人中的關節模組對應的傳動部件(部分圖片由AI生成)
小模數齒輪因高精度、低噪音的特點,成為人形機器人關節模組的核心傳動件之一,其模數范圍通常≤1mm,有些微小模數齒輪甚至要求模數范圍≤0.3mm。人形機器人具身智能的使用場景對諸如機器人上臂、靈巧手等關節模組有極高的壽命和安全冗余要求,因此小模數齒輪在尺寸加工、熱處理和裝配環節都面臨著不小的質量挑戰。

▲ 光學顯微鏡放大1000倍觀測的微模數尺寸的齒形全貌
三重質量挑戰
尺寸加工誤差影響性能
微小模數齒輪受其幾何尺寸和機械性能的影響,對加工精度要求極高,加工機床的參數不正確、傳動、工件安裝出現誤差都會導致關鍵尺寸偏差,從而影響齒輪的性能:
? 齒廓偏差會影響嚙合剛度、傳動平穩性與噪音;
? 齒距累積總偏差直接影響傳動的角度精度和回差;
? 齒向偏差會影響載荷分布均勻性,不當會導致偏載與早期磨損。
熱處理變形壓縮尺寸公差
機加工導致的殘余應力會影響齒輪壽命,適當的熱處理則可以提高小模數齒輪的強度。但熱處理的過程會影響齒輪的尺寸,如滲氮處理會導致尺寸的變形,進一步壓縮了齒輪的形位公差范圍。
裝配精度影響嚙合質量
人形機器人關節模組對齒輪的裝配精度要求極高,例如,諧波減速器通常要求背隙值小于1弧分。裝配精度不足會導致齒輪嚙合間隙失控,傳動效率降低,并且可能會產生周期性沖擊振動,引發高頻振動和噪音,造成傳動部件疲勞損傷,縮短部件壽命。
打造質量閉環
蔡司三坐標測量技術
實現單件齒輪尺寸檢測,驗證加工精度及熱處理尺寸影響。

▲ZEISS CONTURA

▲ZEISS MICURA

▲ ZEISS PRISMO
蔡司三坐標測量設備針對人形機器人的微小模數齒輪和絲杠,可以在一次裝夾中完成多項主要參數的主動測量,配合小模數測針及ZEISS GEAR PRO齒輪測量軟件模塊,即可輕松實現四個維度的測量:
齒形精度
齒廓偏差:實際齒廓與理論漸開線的偏離量,包括齒形誤差、壓力角誤差等。
齒向精度
螺旋線偏差:實際齒面沿齒寬方向與理論螺旋線的偏離量,包括齒向誤差、螺旋角誤差等。
齒距精度
單個齒距偏差:相鄰兩齒間的角度/弧長誤差;
齒距累積總偏差:整個齒輪上任意齒距偏差的累積最大值。
滾柱絲杠精度
滾柱的導程、螺距、三針徑、圓柱度、外徑、內徑尺寸。


▲ ZEISS METROTOM 800
區別于傳統的檢測方式,蔡司工業CT設備可對裝配好的齒輪的嚙合背隙進行高精度無損檢測,在靜態狀態下獲取裝配好齒輪的可溯源三維體積數據,進行準確的嚙合狀態分析,對具體位置的背隙進行精準測量,評估裝配精度。

-
人形機器人
+關注
關注
7文章
982瀏覽量
18508 -
蔡司
+關注
關注
0文章
187瀏覽量
8222
發布評論請先 登錄
再談低溫燒結銀的應用:從春晚四家機器人出鏡的幕后推手說起
人形機器人制造業領域應用的趨勢:技術突破與市場前景
【案例分享】電子谷定制通訊線束:人形機器人穩定律動連接方案

高性能人形機器人關節模組選型的關鍵技術要素

宇樹科技發布H2仿生人形機器人
NVIDIA 發布三大利器,推動人形機器人邁向新紀元
最新發布!泰科機器人發布首款自研雙足人形機器人

突破人形機器人控制器性能瓶頸:高效穩定的電容器解決方案

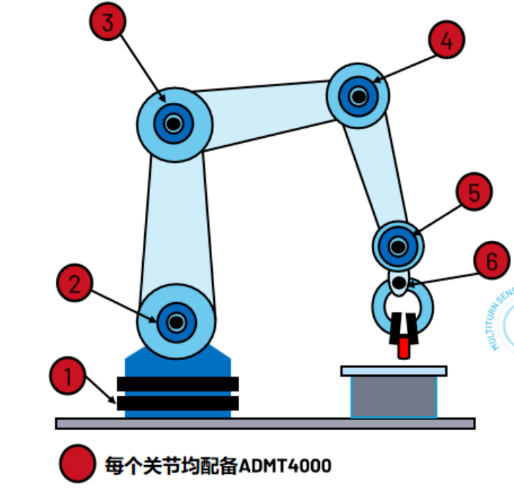
ADI ADMT4000磁性位置傳感器助力人形機器人關節設計
對話:人形機器人連接器與線纜有何攻關點?

突破人形機器人物理限制,MPS全棧方案讓開發者無懼三大挑戰

人形機器人步入“雙腦協同”時代:破解核心控制器的技術困局

實現“AI+”關鍵突破,剖析人形機器人里的關鍵技術和未來趨勢

EtherCAT科普系列(4):EtherCAT技術在人形機器人靈巧手領域應用

突破人形機器人控制器性能瓶頸:高效穩定的電容器解決方案



 工商網監
工商網監
評論