 機器人熱管理技術體系與方案
機器人熱管理技術體系與方案

機器人熱管理技術直接決定機器人的工作范圍、可靠性與使用壽命,是機器人向高功率、輕量化、極端環境適配方向發展的核心支撐……
熱管理系統作為機器人的關鍵支撐技術,需通過科學的散熱、隔熱、控溫手段,維持各部件理想工作溫度。當前,機器人向高功率密度、輕量化、結構緊湊化方向發展,進一步加劇了熱管理難度。
本文總結介紹了機器人內部主要熱敏元件(芯片、電機、電池)的產熱機理與熱挑戰,聚焦被動冷卻、主動冷卻、智能調控、柔性熱管理、極端環境防護等核心技術方案,整合材料創新、系統設計、仿真優化、產業化應用等多維度研究成果,并展望未來機器人熱管理技術的發展趨勢,為機器人領域技術研發、產品設計與產業化落地提供參考。
01
機器人熱管理的必要性
現代機器人,特別是高性能人形機器人、四足機器人和特種作業機器人,正變得越來越機電一體化。其內部集成了高功率密度的計算芯片、伺服電機和動力電池,這些核心部件在運行時會產生大量熱量。同時,機器人常被部署于戶外、火災現場、核輻射區或外太空等極端溫度環境中。
如果熱量不能及時有效地排出或隔離,就會導致諸如電子器件失效、電機性能下降和損壞、電池安全隱患以及結構熱應力問題等嚴重后果。典型案例如:2011年日本福島核事故中,機器人Quince因電機驅動器過熱而自動報停;金星探測中,Venera13著陸器僅存活127分鐘便因高溫高壓失效。
電子器件。機器人控制系統中的控制器、電機驅動器、傳感器等電子器件,易受環境溫度與自身產熱影響,引發機械失效(引線疲勞、芯片封裝斷裂)、腐蝕失效(金屬鍵合點腐蝕)及電氣失效(熱逸潰、電遷移)。民用電子器件最高結溫通常為70-200℃,其中硅器件塑料封裝為125-150℃、金屬封裝為 150-200℃,要求長壽命低維護的設備平均結溫宜低于 60℃。例如,油井機器人在 150℃環境下需通過特殊散熱設計,使電機驅動電路溫度降低 25℃以保障安全運行。
電機。電機作為機器人動力核心,尤其仿人機器人對其功率密度、尺寸和重量有嚴苛要求。電機運行中因機械摩擦、銅損、鐵損產生熱量,溫升過高會導致絕緣壽命縮短、效率下降,嚴重時引發磁性材料退磁、電機燒毀,30%-40%的永磁電機失效源于過熱。通過優化散熱設計,不僅可保障電機安全運行,還能突破額定功率限制,提升機器人性能。
電池。電池是移動機器人的主要能量來源,鋰離子電池因能量效率高、功率密度大、充電速度快等優勢被廣泛應用,其最佳工作溫度范圍為20-45℃,溫度均勻性需控制在5℃以內。低溫環境下,電池內部電阻增大,放電容量顯著下降;高溫環境則會加速電池老化,甚至引發燃燒、爆炸風險。例如,高山寒冷地區機器人通過PTC加熱與鋁板均溫技術,可使-20℃環境下的電池放電容量達到20℃環境的93%。
02
機器人熱管理技術分類與詳解
2.1 冷卻技術
冷卻技術分為主動冷卻(需耗能元件提供動力)與被動冷卻(無額外動力,自然散熱)兩大類,核心目標是通過高效熱傳遞路徑排出器件產生的熱量。
2.1.1 被動冷卻技術:高效適配中低功率場景
被動冷卻技術憑借無額外能耗、結構簡單、可靠性高的優勢,仍是機器人熱管理的基礎方案,近年在材料改良、結構優化與場景適配性上取得顯著突破。
1】散熱器(Heat Sinks):最簡單常用的被動冷卻方式,由鋁、銅等高熱導率金屬制成,通過傳導和自然對流散熱。其熱傳遞效率可通過優化結構增大表面積提升,純銅的導熱系數(400 W/mK)顯著優于鋁(240 W/mK),但成本和重量更高。散熱器具有結構簡單、成本低、維護便捷等優勢,適用于中低功率器件散熱。
2】熱擴散器(Heat Spreaders):作為熱交換器,工作原理與散熱器類似,一般采用高導熱系數的銅制成板狀結構,具有結構簡單、重量輕、適用性廣等特點,可快速將電子設備熱量導出并均勻分布,便于后續散熱。
3】熱管(Heat Pipes):兼具被動與主動應用潛力的高效傳熱器件,由蒸發段、絕熱段、冷凝段組成,內部充注工作流體,通過相變過程實現熱量快速傳遞。其工作過程為:工作流體在蒸發段吸收熱量蒸發,蒸汽經密度差遷移至冷凝段冷凝,冷凝液通過重力或吸液芯結構回流至蒸發段,形成循環。
熱管無移動部件,導熱系數高,工作溫度范圍極廣(-268℃至 3229.9℃),可適應太陽能、核工業、汽車等多場景應用。螺旋式熱管、微型熱管(直徑<2mm)等特殊結構創新設計,適配機器人緊湊空間布局。例如,研究人員為焊接機器人設計的密閉腔體內置熱管系統,將伺服電機驅動模塊熱量導出至外部散熱片,配合壓縮空氣吹掃粉塵,避免散熱面積衰減,熱效率維持在90%以上。
4】相變材料冷卻(PCMs):利用材料固-液或液-氣相變過程中吸收/釋放大量潛熱的特性實現控溫,無需額外冷源,不受環境溫度限制。相變材料(如石蠟)可制成儲熱冷板,作為發熱元件的熱沉,在100℃環境下可使核救災機器人的6個電機驅動器工作時間延長至164分鐘,較無熱防護提升1倍以上。但相變材料存在導熱系數低、相變后無法持續散熱等問題,常與熱管、風冷、水冷結合使用。
PCMs已從單一冷卻向“儲熱 - 控溫”一體化發展,如低溫冷庫巡檢機器人采用PCMs凝固放熱,配合真空隔熱瓦,在-20℃環境下維持電池溫度>0℃,放電容量提升40%;建筑機器人中應用的微膠囊PCMs,可吸收日間太陽能熱量,夜間釋放,降低室內溫控能耗30%。
5】熱界面材料(TIMs)創新:在人形機器人芯片與散熱模塊連接面應用新型TIMs,可使界面熱阻降低40%-50%,芯片溫度下降8-12℃,有效避免高溫導致的算力衰減。新近開發出的石墨烯-金屬納米復合材料、液態金屬微滴TIMs,導熱系數達5-10 W/mK,熱阻低至 0.025 ℃·cm2/W,較傳統硅脂(導熱系數 0.8-1.5 W/mK)熱阻降低60%以上。
2.1.2主動冷卻技術:高功率場景核心解決方案
主動冷卻技術針對高功率、復雜工況需求,在液冷、風冷與智能調控結合上實現突破。
1】風冷技術:分為自然對流散熱(適用于熱流密度≤0.8 W/cm2 的器件)與強迫風冷。風冷系統設計簡單、成本低、工質獲取便捷,通過優化風機選型與風道設計,可減少風扇數量,降低機器人故障率與噪聲。
強迫風冷通過風扇、鼓風機產生強制氣流,散熱效果為自然散熱的5-10倍,散熱功率達50-200 W,噪音控制在30-45 dB。研究者通過電機轉子通風孔洞設計,利用轉子轉動產生壓差驅動氣流,風速達 1.2-1.8 m/s,省去額外風扇占用空間(體積減少30%),降低機器人負載 5%-8%。工業機器人控制柜采用優化風道設計,使內部溫度均勻性提升40%,熱點溫度下降15-20℃。
2】液冷技術:包括循環流動式、浸沒式、噴射式,其中循環液冷在機器人中應用最廣。
循環液冷:通過微通道冷板設計(通道寬度<100μm),使散熱功率達 200-1000 W,熱阻低至 0.02℃/W,適配人形機器人高算力芯片(如 NVIDIA Blackwell B100,TDP 700W;Tesla D1 Soc,TDP 400W)散熱需求。
柔性液冷:針對人形機器人關節運動需求,研究者開發的梯度剛度柔性歧管與嵌入式微流道冷卻模塊,熱阻低至 0.089 cm2·K/W,可承受曲率半徑 2.25 cm的彎曲變形,應力水平僅為傳統封裝的 5%(<6MPa)。在機械臂45°彎曲-恢復循環(4 次)過程中,溫度波動≤4.5%,滿足人形機器人動態散熱需求。
浸沒式液冷:適用于超高算力芯片場景,散熱功率達 1000-5000 W,熱流密度>1000 W/cm2,較傳統液冷散熱效率提升3-5倍。在半導體檢測機器人芯片散熱中應用,可使芯片溫度穩定在 40℃以下,算力維持率達99%。
液冷系統利用水、乙二醇、納米流體等工作流體,通過冷板、流體回路、泵等組件吸收熱量,其導熱系數與熱容遠高于氣體,適用于高熱流密度場景。仿人機器人采用循環水冷后,電機輸入電流可提高5倍,輸出功率達到額定功率的7.5倍。為減輕重量,可采用聚碳酸酯與鋁替代銅制作水冷板,提升單位質量傳熱性能。
3】熱電制冷模塊(Thermo-electric Modules):基于塞貝克效應,可實現加熱/冷卻雙向調控,控溫精度達±0.5℃,制冷功率10-50 W,適配醫療機器人、精密檢測機器人等場景。通過優化模塊幾何結構與散熱匹配,將COP值提升至 0.267-0.618,較傳統設計能耗降低 20%。
例如,醫療手術機器人末端執行器采用熱電制冷模塊,可將局部溫度控制在 23±1℃,避免熱漂移影響手術精度,手術誤差降低 30%。
但該技術結構緊湊、控溫精準,但存在效率低、維護難度大、使用壽命短等問題,工作溫度范圍為 -10℃至70℃,適用于對體積和重量敏感的場景。
2.2 熱防護結構設計
熱防護結構聚焦于阻隔環境熱量侵入,同時保障內部熱量有序排出。針對高溫、核輻射、極地等極端環境,熱防護技術形成“隔熱+吸熱+結構一體化”等三種解決方案。
1】隔熱式結構。利用導熱系數≤0.08 W/(m·K) 的隔熱材料,阻斷熱傳導、熱對流與熱輻射。傳統隔熱材料包括陶瓷纖維隔熱氈(耐溫可達 1260℃)、軟木、石棉等;新型材料有氣凝膠(常溫導熱系數 0.015 W/(m·K),耐溫 <650℃)、真空絕熱板(導熱系數低至 0.0015 W/(m·K),厚度僅為傳統材料的 1/10)。通過多層隔熱結構設計,如外層銀涂層反射熱輻射、中間層低導熱材料、內層空氣層,可使機器人在 700℃環境下承受 60 分鐘高溫。
2】吸熱式結構。結合材料熱容吸收熱量,減少熱量向內部傳遞,分為顯熱存儲(利用銅、石墨等高比熱容材料)與潛熱存儲(利用相變材料固液相變吸熱)。相變材料與熱防護結構結合是主流方向,例如核救災機器人在電子元件密封腔框架中填充石蠟,通過融化吸熱減少環境熱量入侵;低溫環境下,相變材料凝固放熱可實現保溫功能。
3】一體化結構。針對傳統熱防護結構隔熱與承載功能分離的問題,采用波紋夾芯、蜂窩夾芯、皺褶夾芯等夾層結構,在夾芯與面板間填充隔熱材料,實現防熱/承載一體化。該結構比強度、比剛度高,抗沖擊性能好,空間利用率高且更輕量化,通過優化夾芯結構(如鏤空腹板、多層級腹板)可減少熱短路效應,提升隔熱性能。
2.3 產熱控制與優化
從熱量產生源頭優化溫控,降低熱管理系統負擔,主要包括兩方面。
1】溫度監控與功率調節:通過熱模型預測系統溫度變化,當預判過熱風險時,自動調整機器人功率輸出或操作路徑,避免不可逆損壞。例如,"溫度感知操作" 模型可預測20分鐘內系統溫度,精度控制在4℃以內;閉環控制系統根據電機與環境溫度,調節液冷泵輸出功率與電機轉速,延長機器人在惡劣環境下的工作時間。
2】結構與姿態優化:通過遺傳算法優化機械臂制動器線圈參數、設計電機通風孔洞等結構改進,減少部件產熱;通過構建機器人姿態-產熱-溫升模型,調整機器人姿態實現快速熱恢復,例如腿部溫度升至危險區域時,通過姿態優化加速降溫。
2.4 熱管理智能調控與仿真技術
傳統熱設計依賴樣機測試與經驗公式,開發周期長、成本高,數值模擬技術通過虛擬仿真實現熱設計驗證與優化,提升系統適配性與研發效率,已成為熱管理研發的核心工具。
1】多場耦合仿真優化。CFD(計算流體動力學)與 FEA(有限元分析)結合,實現熱-流-固-電多場耦合仿真,仿真精度與實驗誤差<8%,將熱管理方案研發周期從 6 個月縮短至 2 個月,測試成本降低 40%。通過 Fluent軟件優化工業機器人控制器散熱翅片,在維持散熱能力不變的前提下,減少37%-47%的散熱器體積,溫度下降26%-30%。
計算流體動力學(CFD)仿真。通過求解 Navier-Stokes 方程與熱傳遞方程,模擬機器人內部氣流/液流分散態、溫度分布與熱傳遞系數,優化冷卻系統設計。例如,利用CFD仿真焦爐測溫機器人冷卻風道,使底部高溫區域占比從 61.09%降至10.88%,平均溫度下降22.04%。
有限元分析(FEA)建模。將復雜結構離散為微小單元,模擬熱應力、變形、疲勞等特性,評估結構組件與電子裝配的熱性能。例如,通過FEA優化熱沉結構、熱電模塊設計,確保機器人在溫度變化下的結構完整性與熱控效率。
分析型熱模型。基于傳熱學與熱力學理論,通過數學方程預測溫度分布、熱通量與熱梯度,為冷卻機制設計提供依據。例如,利用穩態熱傳導方程可預測機器人臂關鍵節點溫度,指導散熱方案優化。
2】熱模型與AI調控融合。結合機器學習算法實現動態調控,如人形機器人通過實時監測溫度、負載數據(如綜合考慮電機熱耦合、關節摩擦生熱、受迫對流散熱等因素),自適應調整冷卻液流量(50-250 mL/min)與風扇轉速(1000-3000 rpm),能耗降低 25%-30%,溫度控制精度達 ±3℃。數據中心機器人通過AI分配冷卻負荷,使服務器集群能耗降低20%,同時避免局部過熱。
03
熱管理系統性能評估與比較
熱管理系統的性能通過多維度指標量化評估。核心性能參數如下。
1】熱導率(Thermal Conductivity):衡量材料傳熱能力,單位 W/(m·K),銅、銀等金屬材料導熱系數顯著高于聚合物與隔熱材料。
2】熱阻(Thermal Resistance):表征材料對熱流的阻礙作用,單位℃/W,與材料厚度成正比、與導熱系數成反比(R=t/k),熱阻越低散熱效果越好。3】傳熱系數(Heat Transfer Coefficient):反映固-液/氣界面傳熱速率,單位 W/(m2·K),影響對流散熱效率。4】性能系數(COP):評價主動冷卻系統能效,定義為輸出功率與輸入功率之比(COP=Qout/Win),主動熱管理系統 COP 值范圍為 0.21-2.32。5】性能有效性(Performance Effectiveness):衡量被動冷卻系統傳熱效果,為實際傳熱量與最大可能傳熱量之比(ε=Qa/Qm),被動系統該值為 0.1-0.98。
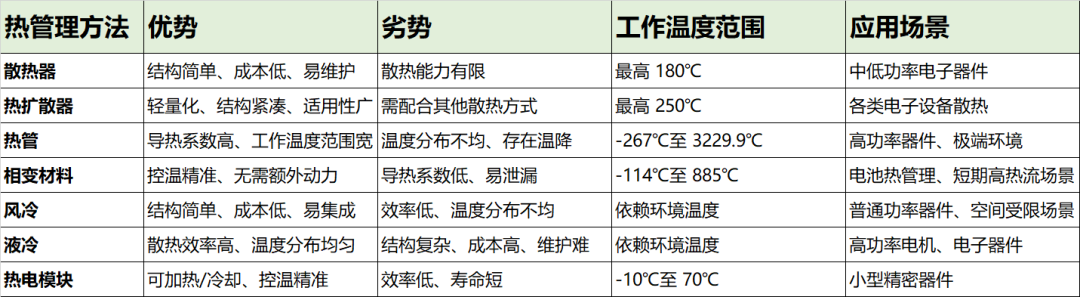
表1:典型技術性能對比。

表2:應用場景與典型案例。
04
機器人熱管理關鍵挑戰
機器人熱管理仍面臨隔熱與散熱矛盾、熱路動態調控、材料耐高溫性能、執行機構熱防護等多重挑戰。
1】隔熱與散熱的矛盾。高溫環境下,機器人需通過隔熱結構阻斷外部熱流侵入,但這同時阻礙了內部器件產熱的排出,形成"隔熱 - 散熱"雙向矛盾。對于移動機器人,當高溫環境范圍較大時,循環冷卻系統的冷媒循環與熱量排放難度增加;而相變材料等被動散熱方式的工作時間受限于材料儲熱能力,難以滿足長時間作業需求。
2】熱路的動態調控需求。機器人常需在高溫與常溫環境間切換作業,例如核救災機器人從常溫區進入高溫區需20-30分鐘,往返耗時40-60分鐘。現有熱控系統多為固定設計,在常溫環境下仍采用高溫模式(如相變材料吸熱),導致溫控效率低下、工作時間受限。如何實現熱路的自主切換,常溫下打開熱交換通道排熱,高溫下切斷熱流阻隔環境溫度,成為提升熱控靈活性的關鍵。
3】材料耐高溫與結構可靠性。極端高溫環境(如火災現場、高溫車間)下,機器人外部材料需承受數百至上千攝氏度高溫,面臨熱變形、力學性能退化等問題。金屬材料在高溫下會發生組織轉變,導致強度、韌性、剛度下降,可能引發機構卡死或關鍵部件損壞;而隔熱材料多力學性能較弱,需額外承載結構支撐,增加了機器人重量與設計復雜度。
4】執行機構的熱防護難題。機器人執行機構(車輪、履帶、抓手、工作臂)需保持空間運動性能,無法通過完整隔熱結構覆蓋,易成為環境熱量侵入的通道。執行機構與電機通過傳動機構連接,形成高效熱通路,導致環境高溫沿傳動部件傳遞至內部敏感器件,如何在保障動力傳輸效率的同時阻斷熱傳導,是電機與執行機構熱防護的核心難點。
05
機器人熱管理技術未來趨勢
未來,需通過相變冷卻技術優化、真空絕熱與一體化結構研發、智能熱控器件應用、AI驅動自適應系統構建、新型材料創新等路徑,突破現有技術瓶頸。
隨著熱管理技術的不斷進步,機器人將在高溫、低溫、核輻射等更廣泛的惡劣環境中實現穩定可靠運行,為應急救援、工業生產、空間探測等領域提供更強大的技術支持。
1】相變冷卻技術的優化與融合應用。相變冷卻技術因傳熱量大、無需額外動力、適配極端環境等優勢,將成為高溫環境機器人熱管理的核心方向。未來需重點突破相變材料導熱系數低、相分離、過冷等問題,通過添加高導熱填料、優化封裝結構提升復合導熱率;開發快速放熱或可更換儲熱模塊,解決相變材料二次利用問題。同時,相變材料與熱管、水冷、風冷的混合冷卻系統將得到廣泛應用,例如相變材料實現熱緩沖與能耗降低,水冷 / 風冷保障長時間大量散熱,形成優勢互補。
2】真空絕熱與一體化防護結構發展。真空絕熱技術通過抽真空減少熱傳導與熱對流,配合多層反射屏抑制輻射熱流,其等效導熱系數可低至 0.0007 W/(m·K),遠優于傳統隔熱材料。未來將真空絕熱技術與夾芯結構、相變材料結合,開發輕量化、高強度、高隔熱性能的一體化防護結構,解決機器人在數百至上千攝氏度環境下的隔熱難題。同時,優化結構拼接處設計,減少熱短路效應,提升整體隔熱可靠性。
3】智能熱控器件與自適應系統研發。熱二極管、熱開關等智能熱控器件可實現熱路的自主通斷,常溫環境下開啟熱交換通道排出內部熱量,高溫環境下切斷熱流阻隔外部高溫,將有效解決不同環境下的熱控適配問題。熱二極管通過單向傳熱特性實現熱路控制,熱開關則利用材料熱膨脹、記憶合金等原理實現導熱面的接觸與分離,這類器件目前在航天領域已有應用,未來需拓展工作溫度范圍與傳/隔熱能力,適配機器人復雜工況。
4】機器人自動化與AI驅動熱管理。機器人自動化技術與熱管理的融合將顯著提升控溫精度與效率。通過集成紅外傳感器、熱成像相機、分布式溫度傳感器,實現機器人熱狀態實時監測與熱點精準定位;基于AI與機器學習算法,建立熱負荷預測模型,動態調整冷卻參數(如冷卻液流量、風扇轉速、散熱模塊位置),實現自適應冷卻。模塊化、移動化機器人冷卻系統將得到發展,例如數據中心移動冷卻機器人、多自由度機械臂專用冷卻模塊,可根據發熱部位靈活調整冷卻策略。
5】新型材料與結構創新。新型高熱導率材料(如碳化硅顆粒、金剛石、氮化鋁、氣相生長碳纖維)的應用,將進一步提升散熱部件的傳熱效率;柔性散熱材料與結構的研發,將適配仿人機器人等具有復雜運動姿態的設備,例如柔性微流道冷卻模塊,在機器人彎曲、拉伸運動中仍能保持穩定散熱性能,其熱阻可低至0.089 cm2·K/W,應力僅為傳統封裝的5%。
參考資料
[1]A review on thermal management methods for robots。Applied Thermal Engineering(2018)
[2] Enhancing thermal management efficiency in robotics engineering: Exploring mechanisms, techniques, and modeling approaches。CONF-MPCS 2024
[3]機器人熱控技術研究現狀綜述。機械科學與技術(2024)
[4] Robotic Automation in Thermal Management: Optimizing Heat Transfer for High-Performance Systems。Journal of Fareast International University(2024)
[5]A flexible thermal management method for high-power chips in humanoid robots。Device(2025)
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
控制器
+關注
關注
114文章
17794瀏覽量
193346 -
機器人
+關注
關注
213文章
31090瀏覽量
222326 -
熱管理
+關注
關注
11文章
531瀏覽量
22998
發布評論請先 登錄
相關推薦
熱點推薦
最新的達芬奇機器人開發套件及方案
視頻安全設備、高級醫療成像設備、機器人圖像處理模塊。 DaVinci 技術包含: 達芬奇軟件:可互操作、優化、隨時可投入生產的視頻和音頻“標準”編解碼器,這些編解碼器沿用 DSP 和集成加速器的功能
發表于 04-23 15:09
機器人技術未來誰來主導?
機器人技術不再是未來的幻想,它已經進入了我們的日常生活。但在這一領域,我們缺乏相應的法律法規。比如無人機,現在由美國聯邦航空管理局( FAA)來管理,但很多人認為,這完全越權了;比如
發表于 01-13 16:39
什么是工業機器人
各種功能的一種機器。它可以接受人類指揮,也可以按照預先編排的程序運行,現代的工業機器人還可以根據人工智能技術制定的原則綱領行動。 1920年捷克作家卡雷爾·查培克在其劇本《羅薩姆的萬能機器人
發表于 01-19 10:58
機器人與未來
機器人),而這種多樣性則展示了機器人技術對我們生活的滲透力,其影響之深遠將不亞于之前計算機和互聯網。機器人之所以能夠展示出如此巨大的潛力與魅力,是因為它天然的半機械半數字屬性,并且隨著
發表于 12-29 14:56
智久智能機器人技術:造智能工廠的不二選擇
他間接成本。 智久機器人目前具備發展智能工業設備的基礎軟硬件平臺,已經掌握智能AGV技術和機器人技術、感知技術等,初步形成了以新型傳感器、工
發表于 01-11 16:52
淺析機器人技術及其應用
摘要:機器人技術是綜合了計算機、控制論、機構學、信息傳感技術、人工智能、仿生學等多學科而形成的高新技術,是當代研究十分活躍,應用日益廣泛的領域,也是一個國家工業自動化水平的重要標志。
發表于 09-22 16:39
智能掃地機器人解決方案
、小工具都需要變得更智能。顯然,基于WiFi控制技術的智能掃地機器人大大的提高了用戶體驗性,為掃地機器人增添了一大亮點。 三 智能掃地機器人控制方案
發表于 05-27 13:31
基于深度學習技術的智能機器人
——工業機器人的智能化程度要求也越來越高,采用深度學習技術為工業機器人賦能是目前各大廠商的統一認知。本文結合實際案例,簡要說明一下智能機器人的實現流程。一、智能
發表于 05-31 09:36
智能AGV無線搬運機器人解決方案
`方案概述在現代化生產制造中,要求原材料、半成品、在制品、成品等在各個生產環節高效流轉,智能搬運機器人提供適用于產線各上、下料點間的智能搬運方案。方案涉及搬運
發表于 06-28 11:03
【方案分享】服務機器人解決方案
` 本帖最后由 qiyangkeji 于 2020-9-21 11:43 編輯
內在價值、技術創新、社會結構、經濟環境及政策體系是共同驅動中國服務機器人產業發展的五大關鍵影響因素,在這些因素
發表于 09-21 11:41
最實用的STM32和ROS機器人的串口通信方案
全網最實用的STM32和ROS機器人的串口通信方案小白學移動機器人同名公眾號:小白學移動機器人創作聲明:內容包含虛構創作內容中的情節存在虛構加工,僅供參考全網最實用的STM32和ROS
發表于 08-20 06:33
機器人技術和機器學習
機器人技術和機器學習正成為嵌入式系統硬件和軟件供應商的下一個重大事件。嵌入式系統可以通過網絡連接和物聯網(IoT)來傳遞信息、共享資源。無論是智能,低能耗,邊緣設備,中間網關還是計算節點,都需要
發表于 12-20 06:03
PDF——工業機器人技術及應用
本書系統地介紹了工業機器人的基本組成、機械機構、運動學及動力學、控制系統、編程與調試、典型應用、管理與維護等內容。全書共7章,第1章介紹了工業機器人的發展與應用、機器人的組成與分類;第
發表于 10-16 21:21



 工商網監
工商網監
評論