") 基于 RT-Thread 的 Vision Board 智能電動(dòng)滑板設(shè)計(jì) | 技術(shù)集結(jié)
基于 RT-Thread 的 Vision Board 智能電動(dòng)滑板設(shè)計(jì) | 技術(shù)集結(jié)

1 前言
在2018年我本科在萬(wàn)宇杰老師的帶領(lǐng)下和小伙伴們一起立了校級(jí)重點(diǎn)科研立項(xiàng)——《DIY電動(dòng)滑板》,非常懷戀那時(shí)候的干勁,閑暇時(shí)分傍晚和枚金江一起玩滑板飛馳綠道,白天和劉姣一起畫工程圖,晚上和葉俊吉萬(wàn)金華他們做舞蹈機(jī)器人,時(shí)光就是這樣一點(diǎn)點(diǎn)緩緩流淌過(guò)。
不知不覺(jué)中雙元班的同窗們都各自高飛,而我還在艱難的求學(xué)中(2025年10月被OE、11月CEP拒稿)。恰巧也讓我有了新的想法,之前的滑板是用Arduino Uno加拓展板設(shè)計(jì)的硬件,現(xiàn)在運(yùn)輸小船做實(shí)驗(yàn)就由我的滑板小小的身體承受著,每次都要走公里才能到達(dá)海邊。滑板載著小船漫步過(guò)海濱小路,載著我跑過(guò)鄉(xiāng)村小路,載著打印機(jī)溜過(guò)校園大道彎兒,值得高興的是我的滑板已經(jīng)累計(jì)有200公里左右,也沒(méi)有出現(xiàn)什么故障,嘻嘻。
接著這樣的機(jī)會(huì)嘗試用本次《2025 RT-Thread 嵌入式大賽》中的Vision board來(lái)移植原來(lái)的Arduino Uno方案,以此來(lái)紀(jì)念我的青春創(chuàng)作,保留原先Uno拓展板的電氣與硬件。這次比賽首先是繪制類似Arduino Uno原先的端口封裝與Vision board之間的拓展板,其次移植藍(lán)牙控制程序和改進(jìn)主動(dòng)剎車功能。

2 設(shè)計(jì)方案
本設(shè)計(jì)采用長(zhǎng)板滑板版面,選用直流無(wú)刷電機(jī),購(gòu)買繪制特殊規(guī)格長(zhǎng)板滑板的皮帶輪及電機(jī)架,以航模電池3S5200MAH電池供電。配以專用直流無(wú)刷電機(jī)電調(diào)。主控電路與遙控電路均以Vision Board為核心,使用藍(lán)牙數(shù)據(jù)通訊協(xié)議進(jìn)行無(wú)線數(shù)據(jù)透?jìng)鳎捎肞WM脈沖寬度調(diào)制方式,采用TOF激光距離傳感器進(jìn)行緊急制動(dòng)判斷。以下為個(gè)模塊設(shè)計(jì)簡(jiǎn)介。
2.1 機(jī)械結(jié)構(gòu)模塊
機(jī)械模塊主要解決傳動(dòng)系統(tǒng)搭建及電機(jī)的安裝。車架架設(shè)計(jì)為高64MM,長(zhǎng)248MM7.25英寸的支架。傳動(dòng)系統(tǒng)采用同步輪傳動(dòng),使用皮帶連接。齒輪比是大輪36齒,小輪12齒,用5M*270,11帶寬齒的齒輪帶連接,傳動(dòng)比為3:1,如圖電機(jī)支架同步輪及配件。

2.2 電機(jī)模塊
電機(jī)的KV值,決定著電機(jī)的轉(zhuǎn)速增加量,KV值越大轉(zhuǎn)速越快。電動(dòng)滑板在啟動(dòng)時(shí),由于靜摩擦的原因,啟動(dòng)的階段阻力非常大,之后阻力會(huì)突然變小。所以,電動(dòng)滑板在啟動(dòng)之后常常有頓挫感。電機(jī)的選擇對(duì)滑板的安全性的提升顯得尤為重要。根據(jù)滑板的啟動(dòng)的特性,應(yīng)選用KV值越小的電機(jī)。
2.2.1 電機(jī)選擇
本設(shè)計(jì)電機(jī)選用N5065外轉(zhuǎn)子無(wú)刷電機(jī)270KV,其各項(xiàng)參數(shù)指標(biāo)如圖左邊為無(wú)刷電機(jī)N5065,右邊為C5065

首先從電機(jī)型號(hào)上來(lái)說(shuō)n5065表示電機(jī)尺寸為:直徑50mm,長(zhǎng)度65mm。前面的n和c表示系列號(hào),其中n系列做工和工作效率高于c系,N電機(jī)比C電機(jī)功率大,發(fā)熱小,扭力大。N電機(jī)比C電機(jī)的磁鐵長(zhǎng)度和定子長(zhǎng)度稍微長(zhǎng)一些,n系尾部為平面,c系尾部為錐形。詳細(xì)參數(shù)如下: 可以看到,n5065的功率要比c5065大,一個(gè)是1820W,一個(gè)是1665W。電壓比c5065高,重量也比c5065重50g。(注:這里只說(shuō)了KV值400得,你也可以選擇270的) 根據(jù)公式:轉(zhuǎn)速=KV值X電壓; n5065電機(jī)轉(zhuǎn)速=KV (400)x22(v)=8800rpm ; c5065電機(jī)轉(zhuǎn)速=KV (400) x20(v)=8000rpm ;
2.2.2 電機(jī)控制
單片機(jī)的控制信號(hào),可以輕松輸出0或1,如果需要控制電機(jī)信號(hào)就需要PWM脈沖寬度調(diào)制,也可參考SG90舵機(jī)控制。在本設(shè)計(jì)中使用KV值為270KV的N5065無(wú)刷電機(jī),無(wú)刷電機(jī)和有刷電機(jī)有相似之處,也有轉(zhuǎn)子和定子,只不過(guò)和有刷電機(jī)的結(jié)構(gòu)相反;有刷電機(jī)的轉(zhuǎn)子是線圈繞組,和動(dòng)力輸出軸相連,定子是永磁磁鋼;無(wú)刷電機(jī)的轉(zhuǎn)子是永磁磁鋼,連同外殼一起和輸出軸相連,定子是繞組線圈,去掉了有刷電機(jī)用來(lái)交替變換電磁場(chǎng)的換向電刷,故稱之為無(wú)刷電機(jī)。依靠改變輸入到無(wú)刷電機(jī)定子線圈上的電流波交變頻率和波形,在繞組線圈周圍形成一個(gè)繞電機(jī)幾何軸心旋轉(zhuǎn)的磁場(chǎng),這個(gè)磁場(chǎng)驅(qū)動(dòng)轉(zhuǎn)子上的永磁磁鋼轉(zhuǎn)動(dòng),電機(jī)就轉(zhuǎn)起來(lái)了,電機(jī)的性能和磁鋼數(shù)量、磁鋼磁通強(qiáng)度、電機(jī)輸入電壓大小等因素有關(guān),更與無(wú)刷電機(jī)的控制性能有很大關(guān)系,因?yàn)檩斎氲氖侵绷麟姡娏餍枰娮诱{(diào)速器將其變成3相交流電,還需要從遙控器接收機(jī)那里接收控制信號(hào),控制電機(jī)的轉(zhuǎn)速,以滿足模型使用需要。相比于傳統(tǒng)直流有刷電機(jī)相比,無(wú)刷電機(jī)能量密度高,力矩大,重量輕,性能好等優(yōu)點(diǎn)。增強(qiáng)了電機(jī)的可靠性,但是無(wú)刷電機(jī)的驅(qū)動(dòng)比有刷電機(jī)要復(fù)雜得多,需要通過(guò)專門的電子驅(qū)動(dòng)器才能正常工作,為降低開(kāi)發(fā)難度的目的,該部分采用了車模用的無(wú)刷電機(jī)調(diào)速器,該調(diào)速器可根據(jù)輸入的PWM信號(hào)占空比的大小來(lái)控制無(wú)刷電機(jī)的轉(zhuǎn)速。
2.3 主控板及其遙控模塊
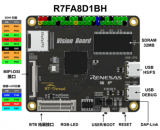
本設(shè)計(jì)選用Vision board作為控制芯片,手機(jī)app收發(fā)作為上位機(jī)遙控。app使用參考

2.3.1 主控芯片選擇
Vision Board搭載全球首顆480 MHz Arm Cortex-M85芯片,擁有Helium和TrustZone技術(shù)的加持。SDK包里集成了OpenMV機(jī)器視覺(jué)例程,配合MicroPython 解釋器,使其可以流暢地開(kāi)發(fā)機(jī)器視覺(jué)應(yīng)用。Vision Board搭載了全球首款基于 ARM Cortex-M85 架構(gòu)的瑞薩電子RA8 MCU,6.39 CoreMark/MHz,可以快速而高效地運(yùn)行機(jī)器視覺(jué)算法,實(shí)現(xiàn)圖像處理、等功能。雖然在這個(gè)電動(dòng)滑板大材小用,但是給代碼框架和使用安全上提高了不少。

參考資料見(jiàn):https://www.rt-thread.org/document/site/#/rt-thread-version/rt-thread-standard/tutorial/make-bsp/renesas-ra/%E7%91%9E%E8%90%A8VisionBoard%E5%BC%80%E5%8F%91%E5%AE%9E%E8%B7%B5%E6%8C%87%E5%8D%97
2.3.2 無(wú)線通信模塊的選取
本設(shè)計(jì)的無(wú)線通信模塊選擇經(jīng)典HC-05主從機(jī)一體藍(lán)牙模塊,該模塊能耗低,穩(wěn)定性強(qiáng),具有很好的抗干擾能力。選用藍(lán)牙模塊以后,可以實(shí)現(xiàn)雙向通訊,加入顯示模塊及其他傳感器模塊后,遙控器可顯示電池電量,行駛速度,行駛里程和載重等。為之后功能的增加和改進(jìn),提供了便利,同時(shí)大量搭載藍(lán)牙的設(shè)備可以用于控制滑板,例如開(kāi)發(fā)手機(jī)APP控制端,將手機(jī)作為遙控端使用。

本設(shè)計(jì)的遙控器和主控板上,分別有一塊Vision board和一個(gè)HC-05藍(lán)牙模塊。藍(lán)牙模塊設(shè)置了自動(dòng)配對(duì)之后,上電之后它們就進(jìn)入“傳輸”狀態(tài),這時(shí),使用函數(shù)串口8編寫讀取解析程序,便可實(shí)現(xiàn)遙控器與主控板之間的數(shù)據(jù)傳輸。
2.3.3 自動(dòng)緊急剎車控制
防追尾系統(tǒng)對(duì)于駕駛員來(lái)說(shuō)是一大必要輔助駕駛利器。此次設(shè)計(jì)的防追尾系統(tǒng)主要利用超聲波在空氣中的傳播速度和關(guān)系進(jìn)行測(cè)量。超聲波具有指向性強(qiáng)、能量消耗慢且在介質(zhì)中傳播距離較遠(yuǎn)特點(diǎn)。其實(shí)說(shuō)到超聲波,我們就會(huì)想到蝙蝠,是的,它的工作原理就是模仿蝙蝠的。先發(fā)出一個(gè)聲音,然后在接收返回的聲音,通過(guò)發(fā)出和返回的時(shí)間差來(lái)可以計(jì)算出距離,就這么簡(jiǎn)單。所以我們就要有一個(gè)機(jī)制,發(fā)出多長(zhǎng)的光信號(hào),回收采集的理論上應(yīng)該是發(fā)出的同時(shí)就要采樣收集了。
原先的方案是超聲波測(cè)距,之前實(shí)測(cè)發(fā)現(xiàn)會(huì)頻繁誤觸,而且采樣時(shí)間非常長(zhǎng)(兩次連續(xù)判斷1.5m障礙物大約需要0.5s,如果車速在2m/s,會(huì)明顯剎車來(lái)不及,主要是反應(yīng)時(shí)間有點(diǎn)長(zhǎng),發(fā)生碰撞危險(xiǎn)),這次采用I2c距離TOF傳感器,看看效果應(yīng)該要好一點(diǎn)點(diǎn)。

3 實(shí)驗(yàn)步驟
3.1 實(shí)驗(yàn)材料
主控板:Vision board開(kāi)發(fā)板,sensor shield拓展板,USB數(shù)據(jù)線
傳感器:TOF傳感器,光照傳感器
執(zhí)行器:N5056無(wú)刷電機(jī),LED燈,一路高電平觸發(fā)繼電器,有源蜂鳴器
通訊:藍(lán)牙HC05
輔助硬件:滑板,同步帶結(jié)構(gòu),盒子,泡沫,熱熔膠,公母線若干
軟件:一臺(tái)安裝RT-Thread開(kāi)發(fā)環(huán)境的電腦
3.2 根據(jù)原理圖搭建電路圖
實(shí)驗(yàn)原理圖:

藍(lán)牙RX接uart8的TX,藍(lán)牙TX接uart8的RX
有源蜂鳴器引腳2
繼電器引腳4,然后單獨(dú)接led燈與外接電源串聯(lián)
ESC定義無(wú)刷電機(jī)引腳9,電調(diào)提供電源
TOF測(cè)距SDA接A4,SCL接A5
光照檢測(cè)接A0
3.4 PCB及三維圖

整體元器件非常少,就2202.54排母下面連接Vision board,然后6/2*8/10排母在上方連接Arduino Uno拓展板。
下面是硬件細(xì)節(jié)圖
拓展板焊接效果

控制器電源電調(diào)都安裝在防水盒中

控制盒整體外觀

3.5 源碼分享
配置串口2

參考:https://www.rt-thread.org/document/site/#/rt-thread-version/rt-thread-standard/tutorial/make-bsp/renesas-ra/%E7%91%9E%E8%90%A8VisionBoard%E5%BC%80%E5%8F%91%E5%AE%9E%E8%B7%B5%E6%8C%87%E5%8D%97?id=%e4%b8%80%e3%80%81ra8d1-vision-board%e4%b8%8a%e7%9a%84uart%e5%ae%9e%e8%b7%b5%ef%bc%88%e5%88%98%e5%bb%ba%e5%8d%8eou%ef%bc%89
配置PWM12

參考:https://www.rt-thread.org/document/site/#/rt-thread-version/rt-thread-standard/tutorial/make-bsp/renesas-ra/%E7%91%9E%E8%90%A8VisionBoard%E5%BC%80%E5%8F%91%E5%AE%9E%E8%B7%B5%E6%8C%87%E5%8D%97?id=%e4%b9%9d%e3%80%81ra8d1-vision-board%e4%b8%8a%e7%9a%84pwm%e5%ae%9e%e8%b7%b5%ef%bc%88%e4%b8%81%e6%8c%af%e5%af%8c%ef%bc%89
配置軟件I2C



參考:https://www.rt-thread.org/document/site/#/rt-thread-version/rt-thread-standard/tutorial/make-bsp/renesas-ra/%E7%91%9E%E8%90%A8VisionBoard%E5%BC%80%E5%8F%91%E5%AE%9E%E8%B7%B5%E6%8C%87%E5%8D%97?id=%e5%8d%81%e4%b8%89%e3%80%81ra8d1-vision-board%e4%b8%8a%e7%9a%84iic%e5%ae%9e%e8%b7%b5%ef%bc%88%e6%ac%a7%e5%b0%8f%e9%be%99%ef%bc%89
配置ADC

參考:https://www.rt-thread.org/document/site/#/rt-thread-version/rt-thread-standard/tutorial/make-bsp/renesas-ra/%E7%91%9E%E8%90%A8VisionBoard%E5%BC%80%E5%8F%91%E5%AE%9E%E8%B7%B5%E6%8C%87%E5%8D%97?id=%e5%85%ad%e3%80%81ra8d1-vision-board%e4%b8%8a%e7%9a%84adc%e5%ae%9e%e8%b7%b5%ef%bc%88%e4%be%af%e6%b3%bd%e5%8d%8e%ef%bc%89
rt-thread設(shè)備驅(qū)動(dòng)勾選

下面是程序控制源碼
/*? Copyright (c) 2024, YourName? 項(xiàng)目:基于 RT-Thread 的電機(jī) ESC 控制(移植自 Arduino)? 功能:通過(guò)串口接收指令控制電機(jī)轉(zhuǎn)速、LED、蜂鳴器,集成VL53L0X主動(dòng)剎車和光線檢測(cè)自動(dòng)夜燈? 已移除:超聲波、光敏電阻、自動(dòng)急停? 新增:所有速度檔位切換必須平滑加減速(逐步 ±1,每次延時(shí) 50ms)? 修復(fù):ESC電調(diào)上電初始化問(wèn)題? 新增:VL53L0X激光測(cè)距主動(dòng)剎車功能? 新增:光線檢測(cè)自動(dòng)夜燈功能*/#include
需要修改rt_config.h中adc0為1:#define BSP_USING_ADC1

這是一個(gè)基于RT-Thread的智能電機(jī)控制系統(tǒng),通過(guò)串口指令控制無(wú)刷電機(jī)轉(zhuǎn)速,集成了VL53L0X激光測(cè)距主動(dòng)剎車和光線檢測(cè)自動(dòng)夜燈功能,具備多線程安全保護(hù)和智能決策能力。

流程說(shuō)明:
多線程并行:三個(gè)獨(dú)立線程分別處理用戶指令、障礙物監(jiān)測(cè)和光線檢測(cè)
安全保護(hù):距離監(jiān)測(cè)線程具有較高優(yōu)先級(jí),確保及時(shí)剎車
智能決策:基于連續(xù)檢測(cè)和閾值判斷,避免誤觸發(fā)
模式切換:支持手動(dòng)/自動(dòng)模式靈活切換
平滑控制:電機(jī)速度變化采用漸進(jìn)式調(diào)節(jié),提升系統(tǒng)穩(wěn)定性
4 動(dòng)手操作
a.首先進(jìn)行光照檢測(cè),如光線較弱則自動(dòng)打開(kāi)前燈;
b.連接好藍(lán)牙,發(fā)送“start”字符串開(kāi)始遙控,發(fā)送“one”,“two”,“three”,“four”即可實(shí)現(xiàn)穩(wěn)步增速,發(fā)送“increase”、“dicrease”即可實(shí)現(xiàn)精準(zhǔn)調(diào)速,發(fā)送“turn on”、“turn off”即可打開(kāi)前燈led繼電器,發(fā)送“buzeer on”、“buzeer off”即可觸發(fā)有源蜂鳴器聲響,app不完全配置

c.發(fā)送stop即可實(shí)現(xiàn)關(guān)閉所有增益,發(fā)送“reset”即可實(shí)現(xiàn)復(fù)位跳出循環(huán),再次發(fā)送發(fā)送“start”字符串又開(kāi)始遙控。超聲波測(cè)距檢測(cè)前方物體距離小于100cm及時(shí)關(guān)閉所有增益,起到自動(dòng)緊急剎車保護(hù),程序中執(zhí)行動(dòng)作時(shí)有蜂鳴器響應(yīng)反饋;還有心跳包程序,可判斷是否藍(lán)牙斷開(kāi)(若斷開(kāi)及時(shí)關(guān)閉所有增益,起到失控保護(hù)),滑板演示。
這是一個(gè)功能完善、安全機(jī)制到位的嵌入式智能控制系統(tǒng),移植了原先Arduino Uno項(xiàng)目,替換更好地TOF距離傳感器,體現(xiàn)了Vision Board多傳感器融合與實(shí)時(shí)控制的良好實(shí)踐。
建議:
希望RT-Thread與華秋國(guó)內(nèi)廠商多多合作定期舉辦嵌入式開(kāi)發(fā)活動(dòng),讓更加優(yōu)質(zhì)的國(guó)產(chǎn)嵌入式生態(tài)做大做強(qiáng);
期待RT-Thread平臺(tái)推出更多有質(zhì)量有意義持續(xù)性的創(chuàng)客活動(dòng)!希望RT不僅開(kāi)展線上活動(dòng),后期可以嘗試線下活動(dòng),多多與開(kāi)發(fā)者,企業(yè),高校互動(dòng),共同探索內(nèi)需外患。
非常感謝RT-Thread舉行活動(dòng),大家都為這個(gè)國(guó)內(nèi)嵌入式生態(tài)出一份力,只要努力認(rèn)真做了都會(huì)有所收獲,期盼這些作品在將來(lái)某一天為構(gòu)建美好未來(lái)貢獻(xiàn)一份微博之力!
我后期會(huì)持續(xù)更新我測(cè)評(píng)的一系列國(guó)內(nèi)開(kāi)發(fā)板測(cè)評(píng),并且會(huì)積極參加有質(zhì)量的玄鐵杯活動(dòng),每天都一點(diǎn)點(diǎn)結(jié)合實(shí)際需求聯(lián)動(dòng)豐富生活,從而實(shí)現(xiàn)對(duì)外部世界進(jìn)行充分的感知,盡最大努力認(rèn)識(shí)這個(gè)有機(jī)與無(wú)機(jī)的環(huán)境,科學(xué)地合理地進(jìn)行創(chuàng)作和發(fā)揮效益,然后為人類社會(huì)發(fā)展貢獻(xiàn)一點(diǎn)微薄之力。
再次非常感謝RT-Thread的相關(guān)組織者支持等等,期待這一次的成績(jī)喲!
-
board
+關(guān)注
關(guān)注
0文章
39瀏覽量
20383 -
Vision
+關(guān)注
關(guān)注
1文章
205瀏覽量
19442 -
電動(dòng)滑板
+關(guān)注
關(guān)注
0文章
24瀏覽量
7153 -
RT-Thread
+關(guān)注
關(guān)注
32文章
1621瀏覽量
44959
發(fā)布評(píng)論請(qǐng)先 登錄
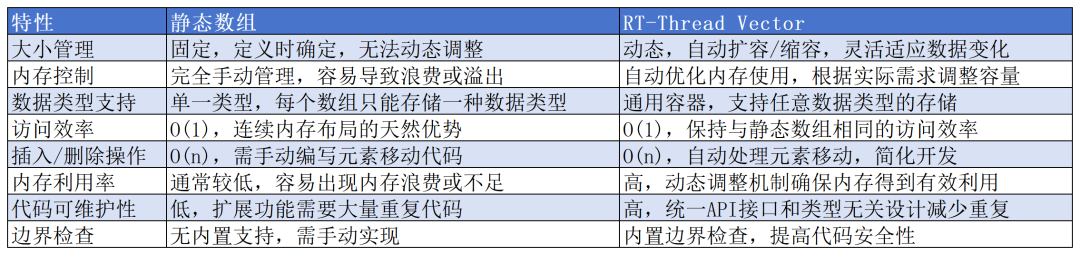
RT-Thread Vector軟件包:嵌入式開(kāi)發(fā)的動(dòng)態(tài)數(shù)組容器 | 技術(shù)集結(jié)
使用RT-Thread studio編譯Vision-Board例程后報(bào)錯(cuò)的原因?
RT-Thread編程指南
RT-Thread全球技術(shù)大會(huì):RT-Thread開(kāi)源重塑軟件發(fā)展新生態(tài)
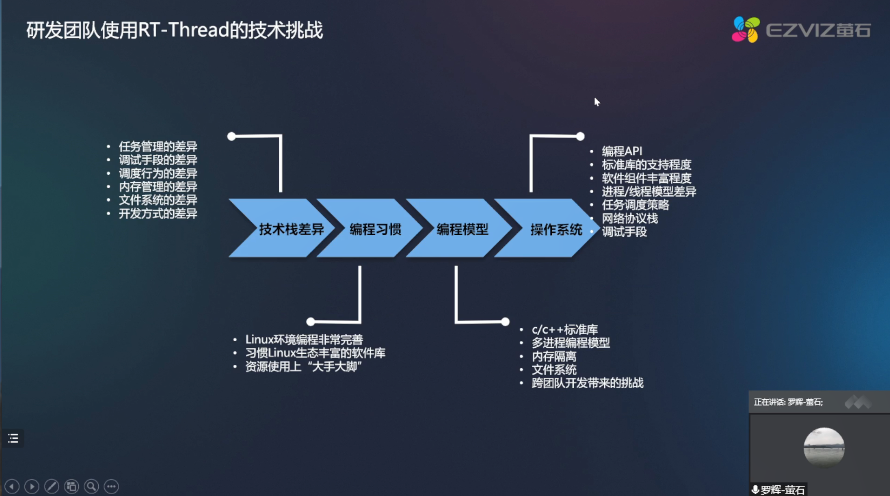
RT-Thread全球技術(shù)大會(huì):螢石研發(fā)團(tuán)隊(duì)使用RT-Thread的技術(shù)挑戰(zhàn)
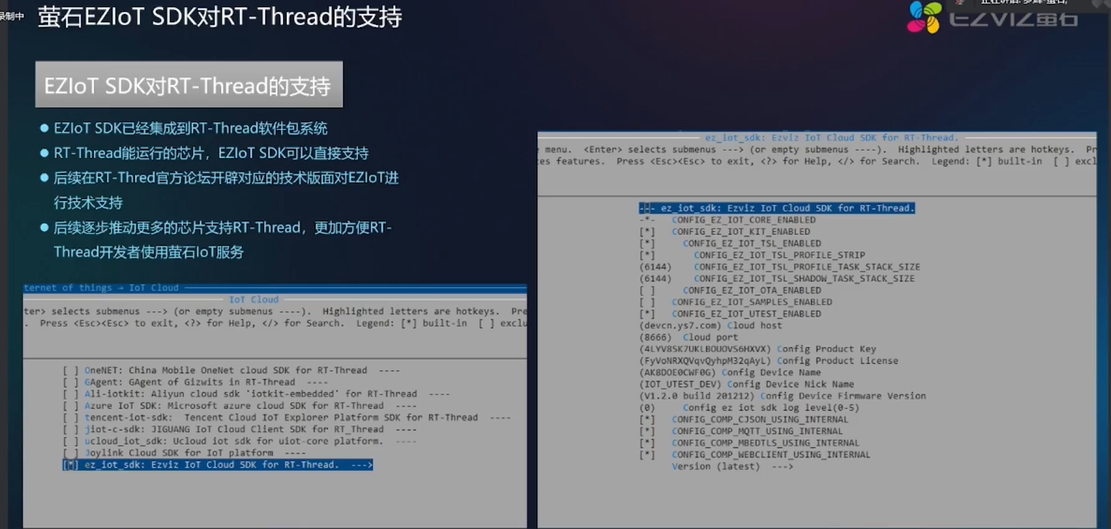
2022 RT-Thread全球技術(shù)大會(huì):螢石EZIOT SDK對(duì)RT-Thread的支持
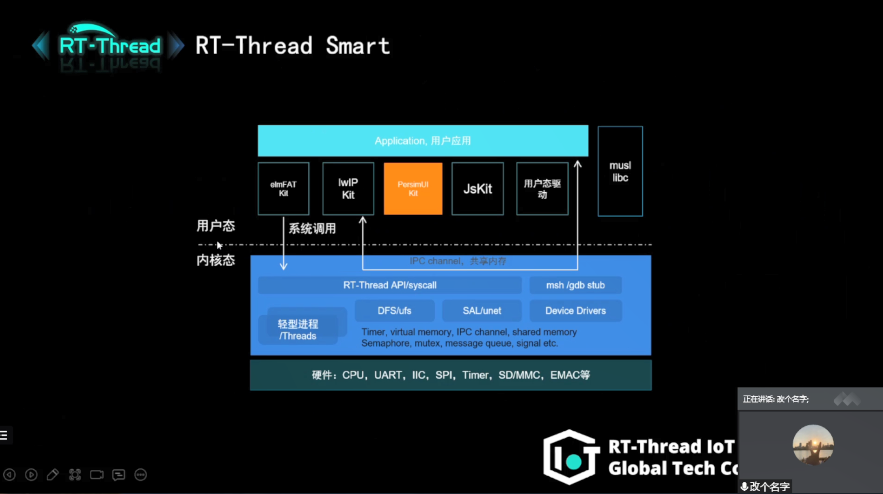
RT-Thread全球技術(shù)大會(huì):RT-Thread Smart更好的兼容Linux生態(tài)
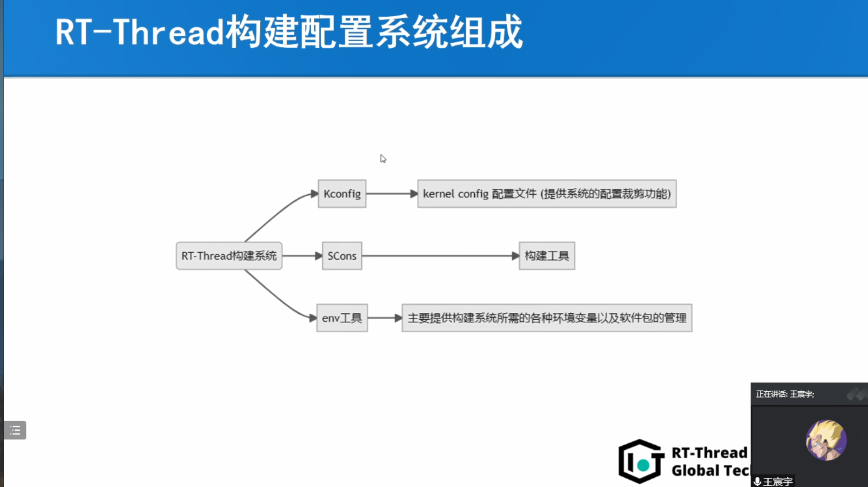
RT-Thread全球技術(shù)大會(huì):Kconfig在RT-Thread中的工作機(jī)制
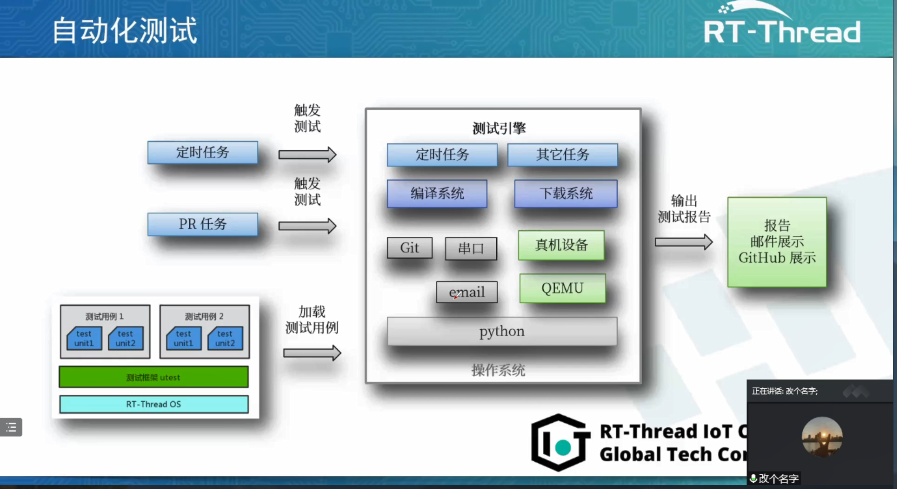
RT-Thread全球技術(shù)大會(huì):在RT-Thread上編寫測(cè)試用例
RT-Thread全球技術(shù)大會(huì):RT-Thread測(cè)試用例集合案例
RT-Thread全球技術(shù)大會(huì):RT-Thread對(duì)POSIX的實(shí)現(xiàn)情況介紹

機(jī)器視覺(jué)RT-Thread Vision Board主要特點(diǎn)
瑞薩與RT-Thread推出基于RT-Thread&OpenMV的RA8人機(jī)交互方案



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論