 4D成像雷達是實現L4級自動駕駛的關鍵技術
4D成像雷達是實現L4級自動駕駛的關鍵技術

當我們談及3D捕捉時,總是先想到光學傳感器。當我們討論在第四維度(時間)討論視覺數據時,傾向于考慮場景數據調度。這些是我們多年來關注激光雷達(LiDAR)和攝影測量,以及用戶針對緩慢移動的大型項目,在時間尺度上將這些技術應用于靜態物體所造成的偏見。
對自動駕駛汽車不可思議的需求推動了多種傳感器的發展,因為,我們不能隨便將從某個應用中獲取的傳感技術,毫不改動地投入其它應用。就像4D成像雷達這樣的新型傳感器,該技術使用回聲定位(如海豚、蝙蝠、或某些人可以確定物體位置的方法)和飛行時間(ToF)測量原理來捕捉3D空間信息。此外,它們還被用于在快速移動的汽車或快速飛行的無人機上,實現時間尺度的成像。
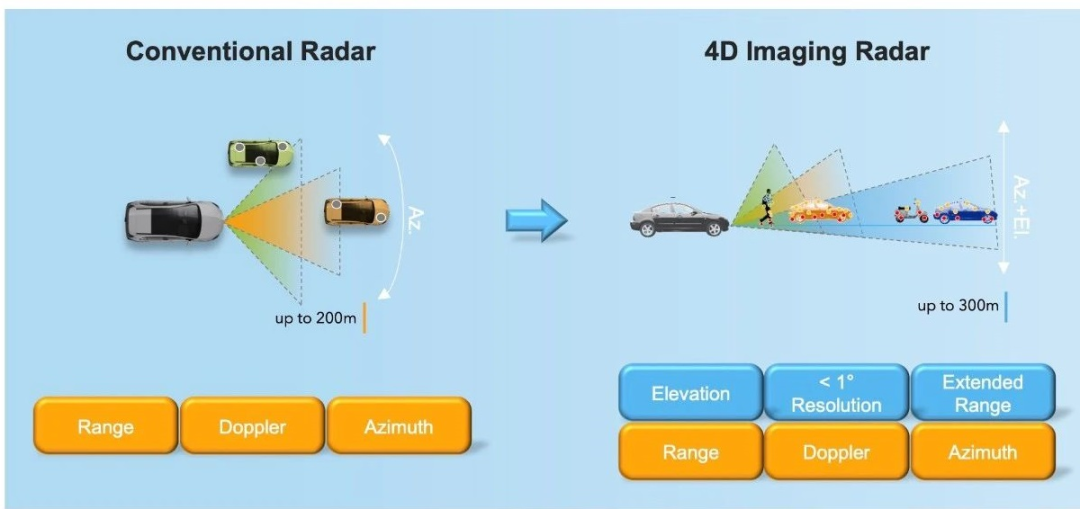
當前雷達與4D成像雷達測量距離對比圖
雷達 vs. 激光雷達
據麥姆斯咨詢報道,最近Sensors Online的一篇文章提出了一個相當有說服力的論點:這些4D傳感器對于實現Level 4和Level 5級自動駕駛來說至關重要。在這篇文章中,Arbe Robotics的首席執行官兼聯合創始人Kobi Marenko解釋了“如果沒有4D成像雷達的幫助,光學傳感器并不能達到Level 4和Level 5級自動駕駛”的原因。在進一步討論該問題之前,先簡單介紹一下自動駕駛分級:- Level 0意味著無自動化,就像現在的手動汽車一樣:司機需要自己控制一切,而汽車本身不能做出任何判斷和控制。- Level 1~3即增加了不同程度的自動化,目前特斯拉的自動駕駛級別介于Level 2到Level 3之間,其自動駕駛系統可實現引導、加速、制動,有時還能控制駕駛本身(盡管這是不應該存在的)。- Level 4意味著汽車可在沒有駕駛員控制的情況下運行,但僅限于特定條件下使用。例如,大學校園里運行的自動駕駛汽車。- Level 5意味著汽車可完全實現自動駕駛,你在車中休息或小睡,你的汽車就能將你安全送回家。從以上汽車自動化級別可以看出雷達的重要性。與攝像頭和激光雷達相比,4D成像雷達能在任何條件下工作,可提供“在包括霧、暴雨、漆黑及空氣污染等各種惡劣天氣和環境條件下最高可靠性的探測”。4D成像雷達的感知范圍還可達到300米,并能捕捉可顯示物體相對汽車是靠近還是遠離的多普勒頻移,這能夠滿足更高汽車自動化級別的要求。
自動駕駛汽車的激光雷達測量圖
4D成像雷達:“壓箱底”技術?!值得注意的是,Marenko并不認為4D成像雷達能夠獨自處理自主任務。他認為4D成像雷達只是包括光學傳感器在內的汽車自動駕駛傳感器系統的一部分。這是自動駕駛汽車中關于3D捕捉的舊觀念——即“每種技術都是工具箱中的一種單獨工具”,目前這個概念仍然適用。Marenko認為:“4D成像雷達是所有傳感器中探測范圍最遠的,這使得它可能最先識別危險。然后,4D成像雷達可將攝像頭和激光雷達傳感器的探測引導到相關區域,這將大大提升自動駕駛的安全性。”Marenko最后最有說服力的論據就是成本。整套汽車自動駕駛傳感器的成本需降到1000美元以下,才能實現商業化。另外Marenko還有比較偏激的觀點:4D成像雷達可讓自動駕駛汽車完全擺脫對激光雷達的需要。但該論點的真實性,只能靠時間來證明了!
-
傳感器
+關注
關注
2577文章
55369瀏覽量
793363 -
自動駕駛
+關注
關注
794文章
14954瀏覽量
181113
原文標題:實現完全自動駕駛的關鍵技術:4D成像雷達
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
擁抱自動駕駛,4D成像毫米波雷達已悄然崛起!
4D成像雷達專欄 | 4D高分辨毫米波雷達概述

未來已來,多傳感器融合感知是自動駕駛破局的關鍵
文遠知行WeRide首發最新的L4級自動駕駛車型日產LEAF 2
要實現L4級自動駕駛 普通的GPS定位技術都不夠
Vayyar瞄準ADAS的XRR平臺一款單芯片4D成像雷達
面向汽車傳感和自動駕駛應用的4D成像雷達技術
被稱為自動駕駛“黑科技”,4D成像雷達發展現狀如何?
中央域控雷達:4D雷達新時代

NVIDIA與Uber合作推進全球L4級自動駕駛移動出行網絡
4D點云加持,FMCW激光雷達助力自動駕駛更安全可靠




 工商網監
工商網監
評論