 電力電子控制從線性控制到模型預測控制在SiC功率系統中的融合與應用
電力電子控制從線性控制到模型預測控制在SiC功率系統中的融合與應用

全球能源互聯網核心節點賦能者-BASiC Semiconductor基本半導體之一級代理商傾佳電子(Changer Tech)是一家專注于功率半導體和新能源汽車連接器的分銷商。主要服務于中國工業電源、電力電子設備和新能源汽車產業鏈。傾佳電子聚焦于新能源、交通電動化和數字化轉型三大方向,代理并力推BASiC基本半導體SiC碳化硅MOSFET單管,SiC碳化硅MOSFET功率模塊,SiC模塊驅動板等功率半導體器件以及新能源汽車連接器。
傾佳電子楊茜致力于推動國產SiC碳化硅模塊在電力電子應用中全面取代進口IGBT模塊,助力電力電子行業自主可控和產業升級!
傾佳電子楊茜咬住SiC碳化硅MOSFET功率器件三個必然,勇立功率半導體器件變革潮頭:
傾佳電子楊茜咬住SiC碳化硅MOSFET模塊全面取代IGBT模塊和IPM模塊的必然趨勢!
傾佳電子楊茜咬住SiC碳化硅MOSFET單管全面取代IGBT單管和大于650V的高壓硅MOSFET的必然趨勢!
傾佳電子楊茜咬住650V SiC碳化硅MOSFET單管全面取代SJ超結MOSFET和高壓GaN 器件的必然趨勢!
1. 緒論:功率電子的第三次革命與控制挑戰
全球能源結構的轉型與電氣化進程的加速,正推動功率電子技術經歷繼功率半導體器件發明和PWM調制技術應用之后的第三次革命。這一變革的核心驅動力源于寬禁帶(Wide Bandgap, WBG)半導體材料——特別是碳化硅(Silicon Carbide, SiC)的商業化成熟,以及數字控制算力的指數級增長。傳統的硅基(Si)IGBT器件受限于開關損耗和熱特性,其工作頻率通常局限在幾千赫茲至兩萬赫茲之間,這在一定程度上掩蓋了傳統線性控制算法(如PI控制)在帶寬和動態響應上的局限性。然而,SiC MOSFET的出現打破了這一平衡,其能夠以極低的損耗在數十千赫茲甚至百千赫茲的頻率下工作,同時承受更高的電壓和溫度應力。
面對SiC器件帶來的納秒級開關速度和極高的功率密度,傳統的基于平均化模型的線性控制策略逐漸顯露出“力不從心”的態勢。線性控制器在處理非線性、多變量耦合及硬約束(如電流限幅、死區效應)時,往往需要復雜的解耦網絡和抗飽和措施,且其動態響應受限于控制環路的帶寬設計。在此背景下,模型預測控制(Model Predictive Control, MPC)作為一種基于系統物理模型、能夠顯式處理約束并進行多目標優化的先進控制策略,正逐步從過程控制領域向高性能功率電子領域遷移,成為SiC時代最具潛力的主流控制范式。
傾佳電子楊茜剖析電力電子控制算法從線性向MPC轉型的理論邏輯與工程實踐,特別是結合國產頭部企業如基本半導體(BASIC Semiconductor)的第三代SiC MOSFET技術與青銅劍技術(Bronze Technologies)的高性能驅動解決方案,探討軟硬件協同設計(Co-design)在實現極致功率密度與效率中的關鍵作用。
2. 傳統線性控制的局限性與MPC的理論優勢
2.1 線性控制范式的邊界效應
在電力電子發展的早期和中期,比例-積分-微分(PID)控制及其變體(如PI、PR控制)構成了工業應用的基石。在交流電機驅動和并網逆變器中,經典的控制架構通常采用雙閉環結構:外環控制直流電壓或速度,內環控制電流。這種架構依賴于脈寬調制(PWM)模塊將連續的控制信號轉換為離散的開關動作。
然而,隨著SiC器件的應用,線性控制面臨以下本質性挑戰:
帶寬限制與相位滯后:線性控制器的設計通常基于頻域分析(如波特圖),要求控制帶寬遠低于開關頻率(通常為1/10或1/20),以避免混疊和穩定性問題。當SiC器件將開關頻率推高至100kHz時,雖然理論帶寬增加,但線性控制器固有的相位滯后在處理極快瞬態(如負載突變或電網故障)時仍顯得遲鈍。
約束處理能力的缺失:電力電子系統本質上是受限系統(電流不能超過器件額定值,占空比限制在0-1之間)。線性控制通過簡單的限幅器(Saturation)來處理這些約束,但這是一種非優化的截斷行為,往往導致積分飽和(Windup)或動態性能惡化。對于SiC器件而言,其短路耐受時間(Short Circuit Withstand Time, SCWT)通常低于IGBT(往往小于2-3μs),對過流保護的響應速度要求極高,線性控制的反應機制難以滿足這種毫秒級的安全邊界控制。
多變量耦合處理的復雜性:在LCL型并網逆變器或多電平變換器(如NPC、ANPC)中,存在復雜的耦合關系(如中點電位平衡)。線性控制通常需要引入額外的解耦網絡或前饋補償,導致控制結構極其復雜且參數整定困難。
2.2 模型預測控制(MPC)的數學重構
MPC代表了一種從“反應式反饋”向“預測式優化”的哲學轉變。其核心思想是利用系統的離散時間數學模型,在每一個采樣時刻預測未來有限時間步長(預測視界 Np)內的系統狀態軌跡,并通過最小化一個包含控制目標和約束條件的代價函數(Cost Function)來求解最優控制序列。
2.2.1 有限控制集MPC (FCS-MPC)
在電力電子領域,最受關注的分支是有限控制集MPC(Finite Control Set MPC, FCS-MPC)。利用功率變換器開關狀態離散有限的特性(例如,三相兩電平逆變器只有8個電壓矢量),FCS-MPC直接利用離散的開關狀態作為優化變量,省去了調制器(Modulator)環節。 其代價函數 g 通常形式化為:
g=∥iref(k+1)?ipred(k+1)∥2+λsw?Nsw+λcon?Ccon
其中,第一項代表電流跟蹤誤差,第二項懲罰開關頻率(降低損耗),第三項處理系統約束(如過流保護)。優勢:這種方法能夠實現極快的動態響應。在SiC高頻應用中,FCS-MPC可以在一個開關周期內完成對大擾動的響應,理論上具有無限的控制帶寬潛力。挑戰:缺乏調制器會導致開關頻率可變,產生寬頻帶的諧波頻譜,給EMI濾波器設計帶來挑戰。此外,計算量隨著電平數和預測視界的增加呈指數級增長。
2.2.2 連續控制集MPC (CCS-MPC)
CCS-MPC計算連續的控制量(如占空比),然后通過傳統的PWM調制器輸出。這保留了固定開關頻率的優點,適合對諧波頻譜有嚴格要求的并網應用。對于SiC逆變器,CCS-MPC結合高頻PWM(如100kHz)可以顯著減小無源元件體積,同時保持優異的穩態波形質量。
2.3 算法與硬件的映射關系
MPC的性能高度依賴于預測模型的準確性。對于SiC MOSFET,其導通電阻 RDS(on) 隨溫度變化顯著(如BASIC BMF540R12MZA3從25°C的2.2mΩ升至175°C的5.45mΩ),這種參數漂移會直接影響預測精度。因此,高性能的SiC MPC系統往往集成了在線參數辨識或基于查找表(LUT)的模型校正機制,這進一步增加了對控制器算力(DSP或FPGA)的需求。
3. SiC功率器件物理特性對控制策略的重塑
控制算法的深度研究離不開對被控對象物理特性的深刻理解。以基本半導體(BASIC Semiconductor)的Pcore?2 ED3系列工業級SiC MOSFET模塊為例,其物理特性直接決定了MPC算法的設計邊界和性能上限。
3.1 第三代SiC芯片技術的靜態與動態特征
基本半導體的BMF540R12MZA3模塊(1200V/540A)采用了第三代SiC芯片技術,這一代技術在比導通電阻(Specific On-Resistance)和柵極電荷(Qg)之間取得了優異的平衡。
低導通損耗與熱穩定性:該模塊在25°C時的典型RDS(on)僅為2.2mΩ。更關鍵的是其高溫特性,在175°C結溫下,實測RDS(on)約為5.03mΩ(上管)至5.45mΩ(下管)。這種相對平緩的電阻溫度系數對于并聯均流至關重要,同時也為MPC算法中的損耗模型提供了相對穩定的參數基礎。
極低的開關損耗:SiC器件消除了IGBT的拖尾電流效應。BMF540R12MZA3的總柵極電荷Qg僅為1320 nC,這對于一顆540A的器件來說極低。低Qg意味著驅動電路可以以更小的功耗實現極快的開關速度,從而大幅降低開關損耗(Eon/Eoff)。這直接賦能了MPC算法:由于開關損耗降低,MPC代價函數中的開關頻率懲罰權重(λsw)可以降低,允許控制器在需要快速動態響應時執行更高頻的動作,而不必過分擔心熱失控。
3.2 寄生參數與高頻振蕩的博弈
高頻應用下,器件的結電容成為影響控制精度的關鍵。BMF540R12MZA3在800V偏置下的輸入電容Ciss約為34nF,而反向傳輸電容Crss(米勒電容)僅為~50-90pF。極小的Crss雖然使得dv/dt極高(可能超過50-100V/ns),但也帶來了嚴重的串擾(Crosstalk)風險。
在半橋拓撲中,當上管快速開通時,下管承受的高dv/dt會通過Crss向柵極注入米勒電流。如果驅動回路阻抗不夠低,柵極電壓可能瞬間抬升超過閾值電壓VGS(th)。BMF540R12MZA3的典型閾值電壓為2.7V,但在175°C高溫下實測值會降至約1.85V。這意味著高溫下的噪聲容限極低,極易發生直通短路。因此,基本半導體明確指出,驅動SiC MOSFET時使用米勒鉗位(Miller Clamp)功能是“必要性”的。對于MPC算法而言,這意味著必須在控制邏輯中考慮到硬件保護電路的動作時間,或者在死區時間(Dead-time)設置上進行極其精細的優化,以在防止直通和降低死區損耗之間找到平衡點。
3.3 封裝技術對控制模型的貢獻
模塊封裝的寄生電感直接影響電壓過沖和振蕩。BASIC的ED3模塊采用了高性能氮化硅(Si3N4)AMB陶瓷基板,其抗彎強度(700 N/mm2)和熱導率(90 W/mk)遠優于傳統的氧化鋁或氮化鋁基板。更重要的是,Si3N4在經歷1000次溫度沖擊后仍能保持良好的銅箔結合力,不發生分層。這種高可靠性使得MPC算法可以放心地利用SiC器件的瞬時過載能力進行動態調節,而不必保守地限制電流變化率以保護脆弱的封裝結構。
4. 驅動技術的革新:連接數字算法與模擬功率的橋梁
在SiC MPC系統中,柵極驅動器(Gate Driver)不再僅僅是信號放大器,而是成為了感知、保護和精細化控制的智能節點。**青銅劍技術(Bronze Technologies)**作為國內領先的驅動方案提供商,其針對SiC優化的驅動產品展示了這一技術趨勢。
4.1 磁隔離與信號傳輸的高保真度
MPC算法依賴于精確的系統狀態反饋和確定性的執行時序。驅動器的信號傳輸延時(Propagation Delay)及其抖動(Jitter)直接影響MPC的預測準確性。在100kHz開關頻率下,一個周期的時長僅為10μs,幾十納秒的延時抖動都會引入顯著的相位誤差。
青銅劍技術的驅動核(如2QD0535T33-C-xx)和即插即用驅動器(如適配62mm SiC模塊的BSRD-2503)采用了自研的磁隔離芯片組。相比傳統的光耦隔離,磁隔離具有更低的傳輸延時、更緊密的通道間匹配度(Channel-to-Channel Matching)以及隨時間推移不衰減的特性。這種確定性的時序特性對于消除MPC控制環路中的不確定性至關重要,使得算法中的延時補償(Delay Compensation)模塊能夠更精確地工作。
4.2 針對SiC特性的主動保護機制
米勒鉗位與串擾抑制:青銅劍的驅動方案詳細闡述了dv/dt誘導的干擾路徑,并提供了抑制策略。其驅動芯片(如BTD5350M)集成了有源米勒鉗位功能,通過在關斷狀態下提供一個極低阻抗的通路接地或負壓,鉗制柵極電壓,防止誤導通。這與基本半導體模塊的應用要求完美契合。
快速去飽和(Desat)保護與軟關斷:SiC MOSFET的短路耐受能力弱,要求驅動器在檢測到短路后極快地(通常<2μs)做出反應。青銅劍的驅動器(如2CP0225Txx系列)集成了VCE(或VDS)短路檢測和軟關斷(Soft Shut Down, SSD)功能。軟關斷通過緩慢降低柵極電壓來限制關斷時的di/dt,從而防止在切斷大電流時因寄生電感產生過高的電壓尖峰擊穿器件。MPC算法需要感知這些保護動作的狀態信號(如SO引腳),以便在故障發生時立即凍結控制律,防止算法發散。
負壓驅動與UVLO:為了可靠關斷并抑制高頻振蕩,SiC MOSFET通常需要負壓關斷(如BASIC推薦的-5V)。青銅劍的驅動電源(如QTJP系列)和驅動板設計支持+18V/-4V或-5V的電壓軌,并集成了原副邊欠壓保護(UVLO)。特別是副邊UVLO,確保了在高頻開關導致輔助電源電壓波動時,不會因為驅動電壓不足而使SiC器件進入線性區導致燒毀。
4.3 高級功能與智能化
青銅劍的某些高端驅動方案(如1QP0650V45-Q)支持光纖信號輸入,這在高壓大功率MPC系統中提供了極高的抗干擾能力。此外,驅動器集成的NTC溫度采樣功能可以將模塊溫度實時反饋給MPC控制器。這使得“電熱模型預測控制”(Electro-thermal MPC)成為可能:控制器不僅優化電能質量,還將結溫作為約束條件,在過載工況下動態調整開關頻率或電流限值,最大限度地利用器件的熱容量。
5. 從線性控制向MPC轉型的深度技術剖析
5.1 動態響應與帶寬的質變
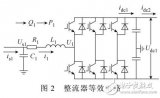
線性PI控制器的設計基于小信號模型,其動態性能受限于環路帶寬。為了保證穩定性(相位裕度),PI控制器的帶寬通常被設計為開關頻率的1/10。在SiC應用中,即便開關頻率達到50kHz,PI控制器的帶寬也僅為5kHz左右。對于高性能電機驅動或有源電力濾波器(APF),這可能無法滿足對快速諧波補償的需求。
MPC利用了SiC器件的高頻開關能力。以FCS-MPC為例,它沒有固定的調制器,控制動作直接作用于開關狀態。在瞬態過程中,MPC可以驅動變流器輸出最大可能的電壓矢量,使電流以最快速度跟蹤參考值。這種“死拍”(Deadbeat)特性使得MPC的動態響應時間可以縮短到一個或兩個采樣周期(例如,在100kHz采樣下僅需10-20μs),相比PI控制有數量級的提升。
5.2 效率優化的新維度
傳統PWM控制中,開關頻率是固定的,效率優化通常依賴于硬件設計或復雜的變頻調制策略。MPC通過在代價函數中引入開關損耗項,可以將效率優化內化為控制算法的一部分。
J=Jtrack+λsw∑∣ΔS∣
通過調節權重系數 λsw,MPC可以在跟蹤精度允許的范圍內,自動選擇開關動作最少的路徑。例如,在三電平逆變器中,MPC可以優先選擇只涉及半橋動作而不是全橋動作的矢量,或者利用冗余開關狀態來平衡熱分布。對于SiC器件,雖然其單次開關損耗低,但在極高頻率下總損耗依然可觀。MPC的這種能力使得系統可以在輕載時自動降低等效開關頻率以提升效率,而在重載或瞬態時提高頻率以保證性能,這是線性控制難以實現的智能化特性。
5.3 硬件-算法協同設計(Co-Design)的必要性
MPC的高性能是以高計算負擔為代價的。每一拍都需要進行模型預測和代價函數計算。對于三相兩電平逆變器,FCS-MPC需要評估8個矢量;而對于三電平系統,矢量數增加到27個。如果在長視界(Np>1)下,計算量呈指數級爆炸。
針對SiC的高頻應用(如100kHz+),傳統的DSP(數字信號處理器)串行計算能力往往成為瓶頸,導致計算延時過大,甚至超過采樣周期。這催生了基于FPGA(現場可編程門陣列)的硬件加速方案。FPGA的并行處理能力允許同時計算所有備選矢量的代價函數,將計算時間壓縮至幾微秒以內。 青銅劍技術的驅動方案中采用自研ASIC芯片組,實際上也是一種硬件協同設計的體現,將部分通用邏輯固化在ASIC中,減輕了上層控制器的負擔并提高了可靠性。
6. 應用場景分析:SiC+MPC的綜合效能
6.1 新能源汽車電機驅動
在商用車電驅動、礦卡電驅動、重卡電驅動、大巴電驅動中,SiC MOSFET(如BASIC的Pcore系列汽車級模塊)取代IGBT模塊已成為趨勢,目的是提升續航里程和功率密度。MPC在此場景下的優勢在于:
轉矩脈動抑制:MPC可以更精確地控制電流波形,減少低頻轉矩脈動,提升駕駛平順性。
弱磁控制:在高速區,MPC可以顯式地處理電壓橢圓約束,實現更平滑、更深度的弱磁操作,充分發揮SiC電機的高速性能。
損耗最小化:結合SiC的低損耗特性,基于損耗模型的MPC算法(Loss-minimizing MPC)可以實時搜索最優的定子磁鏈幅值,使電機和逆變器的總損耗最小,實驗表明可比傳統控制降低總損耗達49%。
6.2 光伏與儲能并網逆變器
對于光伏逆變器(BASIC ED3模塊的目標市場),電網標準對電流諧波(THD)有嚴格限制。
LCL濾波器諧振抑制:傳統的線性控制需要增加有源阻尼控制環節來抑制LCL濾波器的諧振尖峰,增加了系統復雜性。MPC可以將LCL濾波器的所有狀態變量(電容電壓、網側電流等)納入預測模型,天然地實現有源阻尼和系統穩定,無需額外的級聯控制回路。
低電壓穿越(LVRT):當電網電壓跌落時,MPC能夠利用其快速的動態響應,迅速限制輸出電流在安全范圍內,同時提供無功支撐,防止SiC器件因過流而損壞,提高了系統的魯棒性。
6.3 固態變壓器與高頻DC/DC
在固態變壓器(SST)等應用中,雙向DC/DC變換器(如DAB拓撲)需要實現寬電壓范圍下的軟開關(ZVS)。SiC MOSFET的高壓高頻特性是實現SST的基礎。MPC可以基于預測模型,精確計算實現ZVS所需的移相角,確保在全工作范圍內維持SiC器件的軟開關運行,最大化系統效率。
7. 挑戰與解決方案
盡管MPC+SiC的組合前景廣闊,但實際工程落地仍面臨挑戰:
| 挑戰維度 | 具體問題 | 解決方案/技術路徑 |
|---|---|---|
| 計算延時 | SiC高頻開關(如100kHz)導致采樣周期極短(10μs),控制算法計算耗時占比過大,引起相位滯后。 | 延時補償策略:在MPC模型中引入一步或兩步預測(預測 k+2 時刻狀態),補償計算和采樣延時。FPGA加速:利用FPGA并行計算能力,將MPC執行時間縮短至μs級。 |
| 采樣噪聲 | SiC的高dv/dt(>50V/ns)產生強EMI,干擾電流/電壓采樣精度,導致MPC預測失準。 | 抗干擾驅動設計:采用如青銅劍技術的高CMTI磁隔離驅動,優化PCB布局減少串擾。同步采樣:嚴格控制ADC采樣時刻,避開開關瞬態。觀測器技術:使用盧恩伯格觀測器或卡爾曼濾波重構狀態變量,濾除噪聲。 |
| 參數敏感性 | SiC MOSFET的RDS(on)隨溫度變化大(2.2 → 5.45 mΩ),導致模型失配,影響無差拍控制精度。 | 在線參數辨識:集成最小二乘法(RLS)或模型參考自適應系統(MRAS)在線估算參數。魯棒MPC:在代價函數中加入積分項或使用擾動觀測器來消除穩態誤差。 |
| 變開關頻率 | FCS-MPC導致開關頻率分散,濾波器設計困難,且可能激發系統諧振。 | 定頻MPC (CCS-MPC):采用連續控制集MPC結合PWM調制。頻譜整形:在FCS-MPC代價函數中加入頻率控制項,約束開關動作以集中頻譜能量。 |
8. 結論與展望
從線性控制向模型預測控制的演進,是電力電子領域適應SiC寬禁帶器件物理特性的必然選擇。傳統的線性控制已難以挖掘SiC器件在開關速度、耐壓和耐溫方面的全部潛能。MPC憑借其卓越的動態響應、多目標優化能力和對約束的顯式處理,成為SiC功率轉換系統的理想控制大腦。
基本半導體的第三代SiC MOSFET(如BMF540R12MZA3)提供了低損耗、高可靠性的硬件基礎,特別是其Si3N4 AMB封裝和優異的高溫特性,為MPC在高功率密度場景下的應用提供了堅實的物理載體。而青銅劍技術的先進驅動解決方案,通過磁隔離、米勒鉗位、軟關斷及高CMTI設計,成功解決了SiC高頻應用中的信號完整性和保護難題,打通了算法落地的“最后一公里”。
未來,隨著“數據驅動的MPC”(Data-driven MPC)和“智能柵極驅動”(Smart Gate Driver)技術的發展,控制算法與底層硬件的融合將更加緊密。驅動器將不僅僅執行開關動作,還將實時感知器件的老化狀態、結溫和動態參數,并反饋給MPC控制器進行自適應調整。這種軟硬件深層融合的閉環生態,將推動電力電子系統向著更高效率、更高密度和更高智能化的方向邁進。
表1:線性控制與模型預測控制(MPC)在SiC應用中的對比
| 特性維度 | 線性控制 (PI + PWM) | 模型預測控制 (MPC) | SiC器件特性的影響 |
|---|---|---|---|
| 動態響應 | 受限于帶寬(通常 < fsw/10),存在相位滯后 | 極快,受限于采樣周期,具備死拍(Deadbeat)潛力 | SiC的高開關頻率允許更短的預測視界,實現微秒級響應 |
| 約束處理 | 需額外的限幅和抗飽和電路,非最優 | 內置于優化問題中,顯式處理電流、電壓約束 | 有效防止SiC器件過流,利用SiC的高耐壓裕度 |
| 開關頻率 | 固定(頻譜集中,易于濾波) | FCS-MPC可變(頻譜分散);CCS-MPC固定 | SiC低開關損耗緩解了FCS-MPC高頻動作的熱壓力 |
| 多變量耦合 | 需復雜的解耦網絡(如前饋解耦) | 天然支持多輸入多輸出(MIMO)系統 | 簡化了多電平(NPC/ANPC)和LCL濾波系統的控制設計 |
| 參數敏感性 | 通過高增益和積分作用具有一定魯棒性 | 對模型參數(如L, R)高度敏感 | 需應對SiC RDS(on) 隨溫度劇烈變化的特性 |
| 計算負擔 | 低(適合低成本MCU) | 高(通常需高性能DSP或FPGA) | 需高性能硬件支持SiC的高頻采樣與優化計算 |
| 主要優勢 | 技術成熟,穩態性能好,設計標準化 | 動態性能卓越,多目標優化(如效率、共模電壓) | 能夠充分釋放SiC的快速開關與低損耗優勢 |
表2:基本半導體 BMF540R12MZA3 SiC MOSFET 關鍵參數概覽
| 參數名稱 | 符號 | 數值 (典型值/范圍) | 測試條件 | 對MPC及驅動的影響 |
|---|---|---|---|---|
| 漏源擊穿電壓 | VDSS | 1200 V | Tvj=25°C | 決定直流母線電壓上限 |
| 連續漏極電流 | IDnom | 540 A | - | 設定MPC的電流約束邊界 |
| 導通電阻 | RDS(on) | 2.2 mΩ (25°C) ~5.03 mΩ (175°C) | VGS=18V | 影響導通損耗模型,需在MPC中進行溫度補償 |
| 柵極電荷 | QG | 1320 nC | - | 決定驅動功率需求及驅動器峰值電流選型 |
| 輸入電容 | Ciss | ~34 nF | VDS=800V | 影響驅動電路設計及開關速度 |
| 反向傳輸電容 | Crss | ~53 - 92 pF | VDS=800V | 決定米勒效應強度,需驅動器具備米勒鉗位功能 |
| 柵極閾值電壓 | VGS(th) | 2.7 V (25°C) ~1.85 V (175°C) | - | 高溫下閾值降低,需負壓關斷以防誤導通 |
| 推薦驅動電壓 | VGS | +18V / -5V | - | 定義驅動電源的電壓軌規格 |
| 基板材料 | - | Si3N4 AMB | - | 提供極高的熱可靠性,支持高功率密度運行 |
-
SiC
+關注
關注
32文章
3721瀏覽量
69405 -
電子控制
+關注
關注
1文章
71瀏覽量
22135 -
功率半導體
+關注
關注
23文章
1463瀏覽量
45195 -
模型預測
+關注
關注
0文章
9瀏覽量
7161
發布評論請先 登錄
魯棒模型預測控制(RMPC)是什么
神經網絡廣義預測控制在鍋爐燃燒系統中的應用
基于Hammerstei模型的非線性預測控制
基于有限集模型預測控制在電力電子系統中的發展

柔性直流輸電模型預測控制
基于模型預測控制的單目標預測控制法



 工商網監
工商網監
評論