 借助ADI GMSL技術構建機器人視覺系統
借助ADI GMSL技術構建機器人視覺系統

機器人系統越來越依賴視覺進行感知并與環境交互,因而對高速、低延遲數據鏈路的需求日益增長。千兆多媒體串行鏈路(GMSLTM)通過單條線纜即可實現視頻、控制信號和電力的傳輸,具備高可靠性,是一種極有潛力的解決方案。本文探討了攝像頭在機器人中的應用,分析了攝像頭所面臨的連接挑戰,并闡述了GMSL如何助力實現可擴展、穩健、高性能的機器人平臺。
機器人系統越來越依賴先進的機器視覺來感知、導航和與環境交互。隨著攝像頭數量的增加和分辨率的提升,業界對能夠傳輸和聚合處理實時視頻數據的高速、低延遲鏈路的需求變得空前強烈。
最初為汽車應用開發的千兆多媒體串行鏈路(GMSL),正成為適合機器人系統的強大而高效的解決方案。GMSL通過單根線纜同時傳輸高速視頻數據、雙向控制信號和電力,具備長距離傳輸能力、確定性的微秒級延遲和極低的誤碼率(BER)等優勢。它簡化了線束,縮小了整體解決方案尺寸,非常適合應用于在動態且通常惡劣的環境中運行的視覺主導型機器人。
在以下篇幅中,我們將討論攝像頭在機器人中的部署位置和應用場景,以及這些應用場景所面臨的對數據和連接的挑戰,并闡述GMSL如何幫助系統設計師構建可擴展、可靠、高性能的機器人平臺。
攝像頭在機器人中的應用
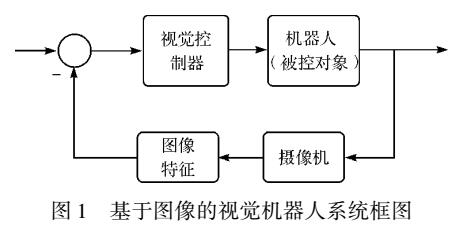
作為現代機器人感知系統的核心部件,攝像頭賦予機器實時認知和響應周圍環境的能力。無論是穿梭于倉庫通道的搬運機器人、分揀包裹的機械臂,還是與人類互動的服務型機器人,視覺系統對于自主運行、自動化操作及人機交互都至關重要。攝像頭不僅功能多樣,形式也各異。根據任務的不同,攝像頭被安裝在機器人的不同部位,并需定制以適配平臺的物理和操作約束(見圖1)。

圖1. 由GMSL賦能的多模態機器人視覺系統示例
自主化
在自主機器人中,攝像頭充當機器人的“眼睛”,使機器人能夠感知周圍環境、避開障礙物,并確定自身在環境中的位置。對于移動機器人,例如送貨機器人、倉庫穿梭車或農業巡檢車,通常會在機器人的邊角或邊緣放置多個廣角攝像頭。此類環視系統提供360°感知能力,幫助機器人在復雜空間中導航,避免碰撞。
其他與自主運行相關的應用利用朝下或朝上的攝像頭,讀取地面、天花板或墻壁上的基準標記。這些標記起到視覺指引的作用,使機器人在工廠或醫院等結構化環境中穿行時,能夠重新校準位置或觸發特定動作。在更先進的系統中,機器人的正面或側面會放置立體視覺攝像頭或飛行時間(ToF)攝像頭,用于生成三維地圖、估算距離,并幫助進行同步定位與地圖繪制(SLAM)。
此類攝像頭的位置通常由機器人的大小、機動能力和所需的視場決定。例如,在小型人行道送貨機器人上,攝像頭可能會隱藏在四個側面的凹陷面板中。無人機上通常裝有前向攝像頭用于導航,還有下向攝像頭用于降落或目標追蹤。
自動化
在工業自動化中,視覺系統幫助機器人快速且穩定地執行重復性或高精度的任務。在這類應用中,攝像頭可能安裝在機器臂上,靠近夾具或末端執行器,使系統得以精準地對物體進行視覺檢查、定位及操作。這對于貼片作業尤其重要,因為準確識別器件或封裝的位置與方向是確保操作成功的關鍵。
有時候,攝像頭固定在工作區域上方,例如安裝在龍門架或架空軌道上,用以監控傳送帶上的物品或掃描條形碼。在倉庫環境中,移動機器人使用前向攝像頭檢測貨架標簽、標志或二維碼,從而實現動態任務分配或路線變更。
某些檢查機器人,特別是基礎設施、公用事業或重工業中使用的機器人,其伸縮桿或關節臂上會安裝變焦攝像頭。通過這些攝像頭,機器人能夠拍攝焊縫、線纜橋架或管道接頭的高清圖像。這些任務若由人工手動完成,不僅危險,而且耗時。
人機交互
攝像頭在機器人與人類的交互中也發揮著核心作用。在協作制造、醫療健康或服務行業中,機器人需要理解手勢、識別人臉,并保持一定的社交存在感。視覺系統使這一切成為可能。
人形機器人和服務機器人通常在其頭部或胸部嵌入攝像頭,藉此模擬人類的視線,從而實現更自然的人機交互。這些攝像頭幫助機器人解讀面部表情,保持眼神交流,或跟隨目標人物的目光。某些系統使用深度攝像頭或魚眼鏡頭來跟蹤身體運動,或檢測是否有人進入共享工作空間。
在協作機器人(cobot)場景中,人類和機器并肩工作,機器視覺用于確保操作安全和提升響應速度。機器人能夠觀察到靠近的肢體或工具,通過調整自身行為來避免碰撞,或在有人靠得太近時暫停作業。
即使在遠程操作或半自主系統中,機器視覺依然至關重要。前置攝像頭將實時視頻流傳輸給遠程操作員,從而支持實時控制或檢查。這些視頻流可疊加顯示增強現實信息,協助進行遠程診斷或培訓等任務。
在所有這些領域中,攝像頭的安裝位置(例如機器人的夾持器、云臺、底座或頭部)都是一項重要設計決策,取決于機器人的功能、形狀和環境。隨著機器人系統不斷增強能力和自主性,視覺的作用將愈發重要,攝像頭的集成也會變得更加復雜且不可或缺。
機器人視覺挑戰
在視覺系統成為機器人智能重要支柱的同時,機遇與復雜性也在增長。高性能攝像頭解鎖了實時感知、精準操控和更安全人機交互等強大的能力,但也對系統架構提出了更高要求。問題不再只是如何高效傳輸大量視頻數據。如今,許多機器人需要在極短時間內基于多模態傳感器輸入做出決策。與此同時,它們必須在緊湊的機械空間內運行,合理管理功耗,避免電磁干擾(EMI),并在靠近人類的環境中嚴格確保功能安全。
機器人所處的環境進一步加劇了這些挑戰。倉庫機器人可能頻繁進出冷庫,承受劇烈溫度波動和冷凝的考驗。農業巡檢車可能在未鋪裝的田野間爬行,持續承受振動和機械沖擊。醫院或公共場所的服務機器人可能會遇到陌生且視覺復雜的環境,必須要能夠迅速適應,確保安全地繞過人和障礙物。
利用GMSL解決挑戰
GMSL具備獨特的優勢,能夠滿足現代機器人系統的需求。憑借高帶寬、穩健性和靈活的集成能力,GMSL非常適合動態、任務關鍵環境中運行的傳感器密集型平臺。以下特性凸顯了GMSL應對機器人領域視覺相關關鍵挑戰的能力。
高數據速率和低延遲
GMSL2和GMSL3產品系列支持3 Gbps、6 Gbps和12 Gbps的前向通道 (視頻路徑)數據速率,覆蓋了絕大部分機器人視覺的應用場景。靈活的鏈路速率使系統設計師能夠針對分辨率、幀率、傳感器類型和處理要求進行優化(圖2)。
對于大多數采用200-300萬像素卷簾快門傳感器并以60幀每秒(FPS)幀率運行的環視攝像頭,3Gbps速率的GMSL鏈路足矣。3Gbps的GMSL鏈路也支持其他常見的檢測模式,比如ToF傳感器,帶有點云輸出的光檢測與測距(LIDAR)單元和傳輸檢測數據或壓縮圖像式回撥的雷達傳感器。
6 Gbps模式通常用于機器人的前向主攝像頭。這類攝像頭需配備更高分辨率的傳感器(通常為800萬像素或更高),以支持目標檢測、語義理解或標志識別等任務。6 Gbps數據速率既支持提供原始輸出的ToF傳感器,也支持立體視覺系統,后者從兩個圖像傳感器傳輸原始輸出流,或從集成圖像信號處理器(ISP)輸出處理后的點云流。目前市場上的許多立體攝像頭依賴于6 Gbps數據速率來實現高幀率性能。
在高端應用場景下,12 Gbps鏈路支持專業機器人使用的1200萬像素或更高分辨率的攝像頭,滿足高精度目標分類、復雜場景分割及遠距離感知等先進功能需求。值得注意的是,某些低分辨率的全局快門傳感器也需要更高速度的鏈路,以減少讀出時間,并避免在快速拍攝周期中出現運動偽影,這在動態或高速環境中尤為重要。

圖2. 傳感器帶寬范圍和GMSL能力
GMSL采用頻域雙工技術來分離前向(視頻和控制)與反向(控制)通道,從而實現確定性低延遲雙向通信,并且消除數據沖突風險。在所有鏈路速率下,GMSL都能保持極低的延遲:從GMSL串行器的輸入到解串器的輸出,累計的延遲通常在幾十微秒以內,這對于大多數實時機器人視覺系統來說可以忽略不計。確定性反向通道延遲使得主機能夠對攝像頭進行精準的硬件觸發。此特性對于多個傳感器同步采集圖像至關重要,同時也支持復雜機器人工作流程中時間敏感的事件驅動型幀觸發機制。如果用USB或以太網攝像頭要達到這種時序精度,通常需要增加單獨的硬件觸發線路,導致系統復雜度和布線工作量加大。
小尺寸和低功耗
GMSL的核心價值之一在于能夠簡化線纜和連接器基座。GMSL本身是一種全雙工鏈路,大多數GMSL攝像頭會利用同軸線纜供電(PoC)特性,通過一條細同軸線纜同時傳輸視頻數據、雙向控制信號和電力。因此,布線工作大大簡化,線纜線束的整體重量顯著減輕,體積更小,緊湊或關節式機器人平臺中的機械走線也更便捷(圖3)。
此外,GMSL串行器是一種高度集成的器件,它將視頻接口(如MIPI-CSI)和GMSL PHY整合到單一芯片中。GMSL串行器在6 Gbps模式下的功耗通常在260 mW左右,明顯低于其他技術在類似數據速率下的功耗。所有這些特性帶來的益處包括:電路板面積縮小,熱管理要求降低(通常可省去龐大的散熱器),系統整體效率提升,對于電池供電的機器人而言意義尤為重大。

圖3. 采用MAX96717的典型GMSL攝像頭架構
傳感器聚合和視頻數據路由
GMSL解串器有多種配置可選,支持一個、兩個或四個輸入鏈路,便于構建靈活的傳感器聚合架構。設計人員可將多個攝像頭或傳感器模塊連接到單個處理器,而無需額外的開關或外部復用,這在多攝像頭機器人系統中特別有用。
除了多路輸入外,GMSL SERDES還支持一些高級特性,能夠在整個系統中智能地管理和路由數據。具體包括:
I2C 和GPIO廣播,用于同步配置多個傳感器和實現幀同步。
I2C地址別名,避免直通模式下I2C地址沖突。
虛擬通道重分配,允許將多個視頻流純凈地映射到片上系統 (SoC)內部的幀緩沖區。
視頻流復制和虛擬通道濾波功能,允許將選定的視頻數據傳送到多個SoC。例如,讓同一攝像頭數據流同時驅動自動化和交互處理流程,或支持冗余處理路徑以增強功能安全性。
安全性和可靠性
最初為汽車高級駕駛輔助系統(ADAS)應用開發的GMSL,在安全性、可靠性和穩健性不容妥協的環境中經過了實際檢驗。機器人系統,特別是在有人環境中操作或執行關鍵工業任務的系統,采用同樣嚴苛的高標準也能受益匪淺。

表1. GMSL與USB和以太網的區別:機器人視覺中的接口技術權衡
大多數GMSL串行器和解串器可在-40°C到+105°C的溫度范圍內穩定運行,并內置了自適應均衡功能,可持續監測并根據環境變化調整收發器設置。因此,系統架構師可以靈活地設計機器人,使機器人在極端或波動的溫度條件下仍能可靠運作。
此外,大多數GMSL器件符合ASIL-B標準,誤碼率(BER)極低。在符合要求的鏈路條件下,GMSL2的典型BER為10-15,而GMSL3憑借強制性前向糾錯(FEC)技術,可將BER降低至10-30。如此出色的數據完整性,結合安全認證機制,大大簡化了系統級別的功能安全集成。
憑借優越的穩健性,GMSL能夠減少停機時間,降低維護成本,提升用戶對長期系統可靠性的信心,對于工業和服務機器人領域具有重要意義。
成熟生態
得益于在汽車系統中多年的大量應用,GMSL已發展出一個高度成熟的生態,獲得了全球眾多合作伙伴的支持。其中包含一整套解決方案,包括評估用和生產級攝像頭、計算板、線纜、連接器及軟件/驅動支持,所有產品都在嚴格的實際使用條件下通過了測試和驗證。對于機器人開發者而言,借助這一成熟生態,可以縮短開發周期、簡化系統集成,并降低從原型設計到量產的門檻。
GMSL與傳統機器人視覺連接技術的比較
近年來,GMSL的應用逐漸從汽車行業擴展至其他領域,為高性能機器人系統的開發帶來了新的可能性。伴隨著機器人視覺技術要求的不斷提升,包括更多攝像頭、更高分辨率、更嚴格的同步精度和更惡劣的工作環境,USB和以太網等傳統接口在帶寬、延遲和集成復雜度方面常常顯得力不從心。GMSL提供穩健、可擴展且可直接投入生產的解決方案,正成為許多先進機器人平臺的首選升級路徑,開始逐步取代USB和以太網。表1圍繞機器人視覺設計的關鍵指標,對這三種技術進行了比較。
結語
隨著機器人應用逐步深入更嚴苛的應用環境,同時應用場景也更加多樣化,視覺系統必須持續演進,以支持更多數量的傳感器、更大的帶寬并確保性能的確定性。傳統連接解決方案雖然在開發階段和某些部署場景中依然重要,但它們在延遲、同步和系統集成方面存在不足,限制了可擴展性。GMSL具備高數據速率、長距離傳輸能力、集成供電及雙向確定性低延遲等優勢,為構建可擴展的機器人視覺系統奠定了堅實基礎。通過采用GMSL,設計人員可以有效縮短從原型設計到量產的時間,交付更加智能和可靠的機器人,從容應對各種實際應用的挑戰。
-
機器人
+關注
關注
213文章
31216瀏覽量
222993 -
攝像頭
+關注
關注
61文章
5102瀏覽量
103310 -
GMSL
+關注
關注
2文章
69瀏覽量
16969 -
視覺系統
+關注
關注
3文章
382瀏覽量
31862
原文標題:利用GMSL打造高性能機器人視覺
文章出處:【微信號:analog_devices,微信公眾號:analog_devices】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
一種基于服務機器人的視覺系統設計
嵌入式在機器人視覺系統的應用
ZN-1AI工業機器人與智能視覺系統應用實訓平臺介紹
Tripod機器人視覺系統



 工商網監
工商網監
評論