 翹曲晶圓傳輸易損壞,哪種末端效應器的晶圓機器人適配性更好?
翹曲晶圓傳輸易損壞,哪種末端效應器的晶圓機器人適配性更好?

在半導體和LED產業中,薄型化、大尺寸化的晶圓(如碳化硅晶圓、藍寶石基板)因制造工藝特性,容易出現翹曲現象。這類晶圓在傳輸過程中稍有不慎就會導致碎裂或表面損傷,成為產線良率提升的“攔路虎”。許多客戶都面臨這樣的困擾:“翹曲晶圓到底該用什么樣的晶圓搬運機器人來傳輸?”事實上,末端效應器作為晶圓搬運機器人直接接觸工件的部件,其設計是否適配,直接決定了翹曲晶圓的傳輸安全性。
四大末端效應器的適配邏輯
上銀晶圓搬運機器人提供真空吸取式、夾持式、承靠式和伯努利(Bernoulli)四大類末端效應器,針對翹曲晶圓的特性,承靠式和伯努利效應設計展現出更優的適配性。
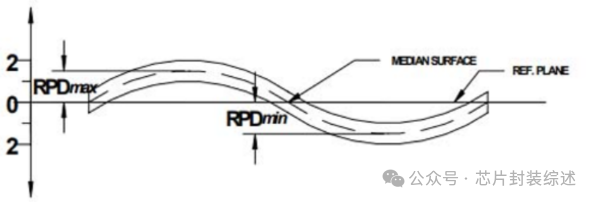
承靠式末端效應器通過邊緣支撐的方式接觸晶圓,不直接壓迫晶圓表面。例如處理翹曲量±1.5mm的8寸晶圓時,承靠式末端的多個支撐點可根據晶圓翹曲形態自適應調整,分散接觸應力,避免局部壓力過大導致碎裂。某LED客戶使用承靠式末端傳輸2mm厚的藍寶石基板,破損率從原來的0.5%降至0.005%以下。
伯努利效應末端則是通過氣流產生的吸附力實現無接觸傳輸。當壓縮空氣流過末端表面時,會在晶圓下方形成低壓區,利用氣壓差將晶圓“懸浮”起來,接觸面積趨近于零。這種設計特別適合超薄(厚度<300um)、透明或表面有精密圖案的晶圓——比如在光罩傳輸中,伯努利末端可避免接觸光罩表面的光刻膠層,杜絕劃痕風險。上銀晶圓搬運機器人的伯努利末端還支持可調氣壓,可根據晶圓重量和翹曲程度精準控制吸附力,確保傳輸過程中晶圓姿態穩定。
末端效應器與機器人的協同設計
選擇末端效應器時,還需考慮與晶圓搬運機器人主體的匹配。例如E系列晶圓搬運機器人搭配伯努利末端時,其DD馬達的快速響應特性可減少啟停過程中的氣流波動;H系列的高速性能則能與承靠式末端的穩定性結合,滿足高節拍產線需求。此外,上銀晶圓搬運機器人的末端接口采用標準化設計,可快速更換不同類型的末端,適應多品種晶圓的柔性生產。
實際應用中的細節優化
在實際操作中,翹曲晶圓的傳輸還需注意“取放角度”和“運動加速度”。上銀晶圓搬運機器人支持自定義運動軌跡,可通過調整Z軸升降速度和R軸旋轉角度,讓晶圓以“傾斜姿態”進出Cassette,避免與載具邊緣碰撞。某半導體客戶處理翹曲±5mm的12寸晶圓時,通過這種軌跡優化,配合伯努利末端,成功實現了零破損傳輸。
海威機電作為HIWIN集團正式授權的專屬經銷商(上銀專屬經銷商),2000年成立至今已經25年,授權證書編號HC-D2026002,我們深知翹曲晶圓傳輸的復雜性。通過結合上銀晶圓搬運機器人的末端效應器技術與現場工藝經驗,我們能為客戶提供從末端選型到軌跡調試的全方案支持。畢竟,保護好每一片晶圓,就是在守護產線的良率與效益。

審核編輯 黃宇
-
機器人
+關注
關注
213文章
31161瀏覽量
222757 -
晶圓
+關注
關注
53文章
5420瀏覽量
132402
發布評論請先 登錄
翹曲±1.5mm晶圓選哪種前端Aligner能保定位穩定?

半導體aligner尋邊器怎樣依據晶圓尺寸及翹曲度精準選型?

晶圓搬運機器人搭配Aligner尋邊器,能提升定位傳輸效率嗎?
上銀晶圓搬運機器人的重復定位精度能否滿足半導體高精度傳輸要求?
基于BL370邊緣控制器的晶圓傳輸機器人集成化控制解決方案
適配超薄晶圓的aligner型號有哪些?能處理±1.5mm翹曲嗎?


超薄晶圓切割:振動控制與厚度均勻性保障
晶圓切割中振動 - 應力耦合效應對厚度均勻性的影響及抑制方法
wafer晶圓厚度(THK)翹曲度(Warp)彎曲度(Bow)等數據測量的設備

一種低翹曲扇出重構方案



 工商網監
工商網監
評論