") 微電網(wǎng)保護(hù)理論:自適應(yīng)保護(hù)與故障定位的算法基礎(chǔ)
微電網(wǎng)保護(hù)理論:自適應(yīng)保護(hù)與故障定位的算法基礎(chǔ)

微電網(wǎng)作為含分布式電源、儲(chǔ)能、柔性負(fù)荷的多元耦合系統(tǒng),其“源荷分散、運(yùn)行模式靈活、故障電流幅值多變、故障方向雙向”的特性,使傳統(tǒng)大電網(wǎng)“基于固定定值、單向故障電流”的保護(hù)方案不再適用。微電網(wǎng)保護(hù)的核心目標(biāo)是在并網(wǎng)/孤島等不同運(yùn)行模式下,快速、精準(zhǔn)識(shí)別故障,可靠切除故障區(qū)域,同時(shí)保障非故障區(qū)域正常供電。自適應(yīng)保護(hù)與故障定位是應(yīng)對(duì)微電網(wǎng)保護(hù)挑戰(zhàn)的兩大核心技術(shù),其算法設(shè)計(jì)直接決定保護(hù)系統(tǒng)的可靠性與精準(zhǔn)性。廣東科銳捷提供虛擬電廠管理系統(tǒng)解決方案,咨詢(xún)服務(wù):1.3.7-5.0.0.4-6.2.0.0。本文將系統(tǒng)拆解自適應(yīng)保護(hù)與故障定位的算法基礎(chǔ),厘清算法原理、實(shí)現(xiàn)流程與適用場(chǎng)景,為微電網(wǎng)保護(hù)系統(tǒng)的設(shè)計(jì)與優(yōu)化提供理論支撐。
一、微電網(wǎng)保護(hù)的核心挑戰(zhàn):傳統(tǒng)保護(hù)方案的適配性不足
微電網(wǎng)的結(jié)構(gòu)與運(yùn)行特性導(dǎo)致故障特征復(fù)雜多變,傳統(tǒng)保護(hù)方案難以滿(mǎn)足需求,核心挑戰(zhàn)體現(xiàn)在四個(gè)方面,這也是自適應(yīng)保護(hù)與故障定位算法需解決的核心問(wèn)題:
? 故障電流幅值多變:分布式電源(尤其是逆變器接口型電源)的故障電流受控制策略限制,幅值遠(yuǎn)小于同步發(fā)電機(jī),且隨分布式電源滲透率、運(yùn)行模式變化而波動(dòng),導(dǎo)致傳統(tǒng)過(guò)流保護(hù)的固定定值無(wú)法兼顧“靈敏性”與“選擇性”——定值過(guò)小易誤動(dòng),定值過(guò)大易拒動(dòng)。
? 故障電流方向雙向:分布式電源的接入使微電網(wǎng)故障時(shí)電流呈現(xiàn)雙向流動(dòng)特性,傳統(tǒng)基于“單向電流”的方向保護(hù)失去判據(jù),難以準(zhǔn)確區(qū)分故障區(qū)域與非故障區(qū)域。
? 運(yùn)行模式切換影響:微電網(wǎng)在并網(wǎng)與孤島模式下的等效阻抗、故障電流水平差異顯著,并網(wǎng)模式下故障電流受大電網(wǎng)支撐幅值較大,孤島模式下僅依賴(lài)內(nèi)部分布式電源支撐幅值較小,傳統(tǒng)保護(hù)方案無(wú)法自適應(yīng)模式切換。
? 故障類(lèi)型復(fù)雜多樣:微電網(wǎng)中不僅存在三相短路、單相接地等傳統(tǒng)故障,還易因分布式電源波動(dòng)、電力電子裝置特性引發(fā)諧振、高阻故障等特殊故障,此類(lèi)故障特征微弱,傳統(tǒng)保護(hù)難以精準(zhǔn)識(shí)別。
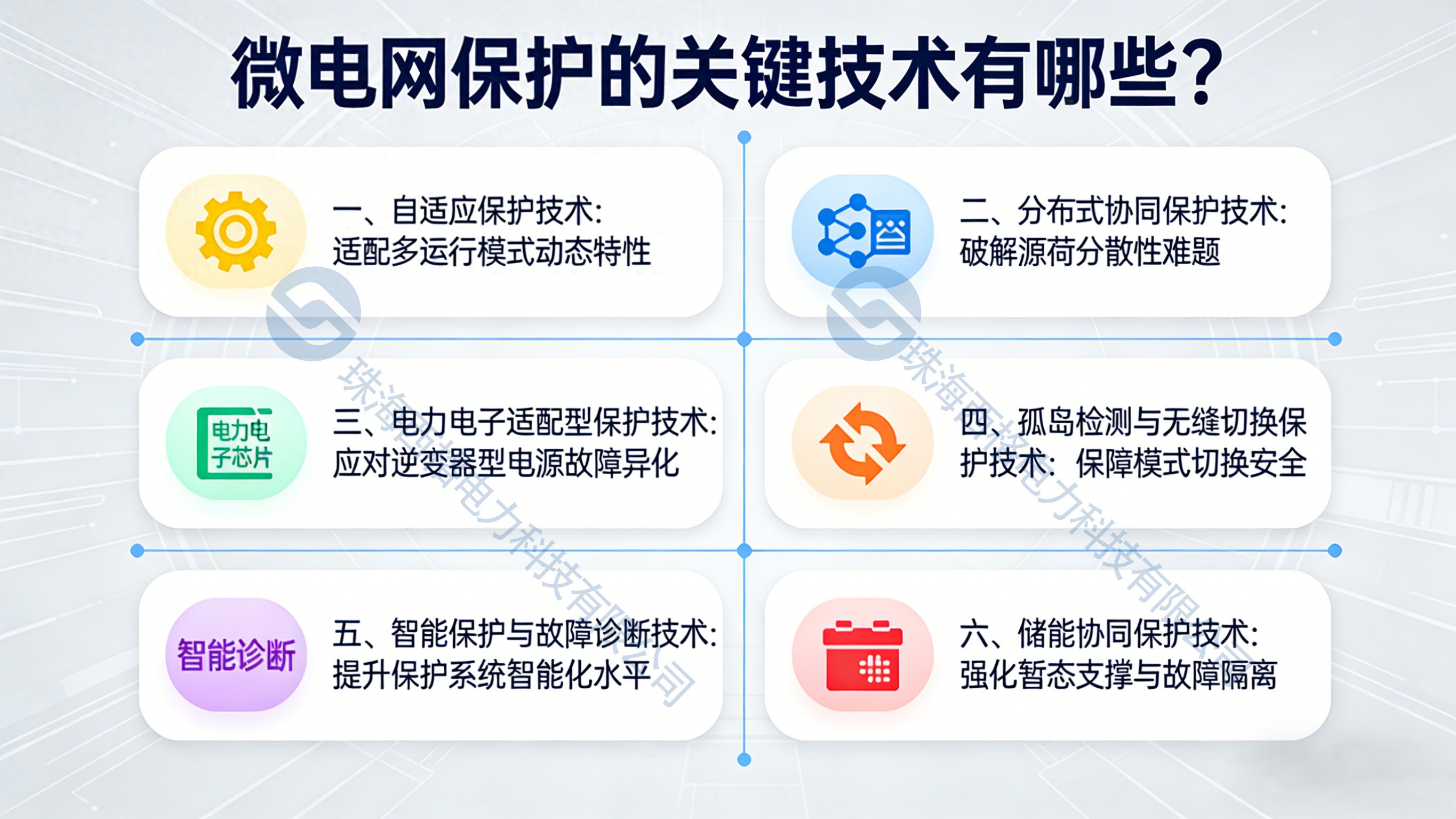
二、自適應(yīng)保護(hù)的算法基礎(chǔ):動(dòng)態(tài)適配系統(tǒng)狀態(tài)的保護(hù)決策邏輯
自適應(yīng)保護(hù)的核心思想是“實(shí)時(shí)感知系統(tǒng)運(yùn)行狀態(tài)與故障特征,動(dòng)態(tài)調(diào)整保護(hù)定值、保護(hù)判據(jù)與動(dòng)作策略”,實(shí)現(xiàn)保護(hù)性能與系統(tǒng)狀態(tài)的精準(zhǔn)匹配。其算法體系可分為“系統(tǒng)狀態(tài)感知算法”“故障特征提取算法”“自適應(yīng)定值整定算法”“保護(hù)動(dòng)作邏輯優(yōu)化算法”四個(gè)核心模塊,各模塊協(xié)同實(shí)現(xiàn)自適應(yīng)保護(hù)功能。

1. 系統(tǒng)狀態(tài)感知算法:自適應(yīng)保護(hù)的前提基礎(chǔ)
系統(tǒng)狀態(tài)感知的核心是實(shí)時(shí)獲取微電網(wǎng)的運(yùn)行模式、分布式電源出力、負(fù)荷水平、等效阻抗等關(guān)鍵參數(shù),為后續(xù)定值整定與判據(jù)優(yōu)化提供數(shù)據(jù)支撐。核心算法包括運(yùn)行模式識(shí)別算法與系統(tǒng)參數(shù)估算算法:
? 運(yùn)行模式識(shí)別算法:核心是區(qū)分微電網(wǎng)當(dāng)前處于并網(wǎng)模式還是孤島模式,常用算法包括頻率/電壓突變檢測(cè)法、功率平衡法、阻抗辨識(shí)法。例如,頻率/電壓突變檢測(cè)法通過(guò)實(shí)時(shí)監(jiān)測(cè)母線頻率與電壓,當(dāng)檢測(cè)到頻率偏差超過(guò)±0.5Hz、電壓偏差超過(guò)±10%且持續(xù)時(shí)間超過(guò)20ms時(shí),判定為孤島模式;功率平衡法則通過(guò)計(jì)算分布式電源總出力與負(fù)荷總需求的差值,當(dāng)差值接近零(無(wú)大電網(wǎng)功率交換)時(shí),判定為孤島模式。此外,基于小波變換的算法可通過(guò)提取電壓/電流信號(hào)的暫態(tài)特征,實(shí)現(xiàn)運(yùn)行模式的快速識(shí)別,響應(yīng)時(shí)間可達(dá)毫秒級(jí)。
? 系統(tǒng)參數(shù)估算算法:核心是估算微電網(wǎng)的等效阻抗、分布式電源故障電流水平等參數(shù)。常用算法包括最小二乘法、遞歸最小二乘法(RLS)、卡爾曼濾波算法。例如,遞歸最小二乘法通過(guò)實(shí)時(shí)采集電壓、電流數(shù)據(jù),動(dòng)態(tài)更新系統(tǒng)等效阻抗的估算值,公式為hat{theta}(k) = hat{theta}(k-1) + K(k)[y(k) - varphi^T(k)hat{theta}(k-1)],其中**hat{theta}**為阻抗估算值,**K(k)**為增益矩陣,**y(k)**為電壓采樣值,**varphi(k)**為電流采樣向量,該算法具備實(shí)時(shí)性強(qiáng)、收斂速度快的優(yōu)勢(shì),可適應(yīng)系統(tǒng)參數(shù)的動(dòng)態(tài)變化。
2. 故障特征提取算法:精準(zhǔn)識(shí)別故障的核心支撐
故障特征提取的核心是從含噪聲的電壓/電流信號(hào)中,提取故障發(fā)生的時(shí)刻、故障類(lèi)型、故障嚴(yán)重程度等關(guān)鍵信息,為保護(hù)判據(jù)構(gòu)建提供依據(jù)。常用算法包括傅里葉變換、小波變換、S變換、希爾伯特-黃變換(HHT)等:
? 傅里葉變換(FT):用于提取故障信號(hào)的穩(wěn)態(tài)基波與諧波分量,適用于穩(wěn)態(tài)故障(如永久性短路)的特征提取。其核心原理是將時(shí)域信號(hào)分解為不同頻率的正弦分量,通過(guò)計(jì)算基波幅值、相位差等參數(shù),判斷是否發(fā)生故障。但傅里葉變換對(duì)暫態(tài)信號(hào)的提取能力較弱,難以適應(yīng)微電網(wǎng)暫態(tài)故障的快速識(shí)別需求。
? 小波變換(WT):具備“時(shí)域-頻域”局部化分析能力,可有效提取故障暫態(tài)信號(hào)的特征(如暫態(tài)電流的幅值突變、頻率分量變化),適用于瞬時(shí)故障、高阻故障等暫態(tài)特征明顯的故障類(lèi)型。其核心原理是通過(guò)小波基函數(shù)與故障信號(hào)的卷積運(yùn)算,得到小波系數(shù),當(dāng)小波系數(shù)超過(guò)預(yù)設(shè)閾值時(shí),判定為故障發(fā)生,同時(shí)通過(guò)小波系數(shù)的模極大值位置確定故障時(shí)刻。常用小波基包括db4、db6、sym4等,通過(guò)優(yōu)化小波基選擇可提升特征提取精度。
? 希爾伯特-黃變換(HHT):適用于非線性、非平穩(wěn)的故障信號(hào)(如逆變器接口型分布式電源的故障信號(hào)),核心包括經(jīng)驗(yàn)?zāi)B(tài)分解(EMD)與希爾伯特變換(HT)兩步。首先通過(guò)EMD將故障信號(hào)分解為多個(gè)本征模態(tài)函數(shù)(IMF),再對(duì)各IMF進(jìn)行HT,得到瞬時(shí)頻率與瞬時(shí)幅值,形成希爾伯特譜,通過(guò)分析希爾伯特譜的變化特征,實(shí)現(xiàn)故障類(lèi)型與故障程度的精準(zhǔn)識(shí)別。
3. 自適應(yīng)定值整定算法:動(dòng)態(tài)匹配故障電流的核心邏輯
自適應(yīng)定值整定的核心是根據(jù)系統(tǒng)狀態(tài)感知結(jié)果與故障特征,動(dòng)態(tài)調(diào)整保護(hù)定值(如過(guò)流保護(hù)的動(dòng)作電流、時(shí)限,距離保護(hù)的阻抗定值),確保保護(hù)的靈敏性與選擇性。核心算法包括基于故障電流預(yù)測(cè)的定值整定算法、基于等效阻抗的定值整定算法、基于多目標(biāo)優(yōu)化的定值整定算法:
? 基于故障電流預(yù)測(cè)的定值整定算法:通過(guò)系統(tǒng)參數(shù)估算結(jié)果,預(yù)測(cè)不同運(yùn)行模式下的最大/最小故障電流,以此確定保護(hù)定值的上下限。例如,并網(wǎng)模式下,考慮大電網(wǎng)與分布式電源的共同貢獻(xiàn),預(yù)測(cè)最大故障電流I_{fault-max-grid};孤島模式下,僅考慮分布式電源貢獻(xiàn),預(yù)測(cè)最大故障電流I_{fault-max-island},保護(hù)動(dòng)作電流定值動(dòng)態(tài)調(diào)整為I_{set} = k_{rel} cdot I_{load-max}(**k_{rel}**為可靠系數(shù),**I_{load-max}為最大負(fù)荷電流),同時(shí)確保I_{set}**小于預(yù)測(cè)的最小故障電流,保障靈敏性。
? 基于等效阻抗的定值整定算法:適用于距離保護(hù)的自適應(yīng)整定,通過(guò)實(shí)時(shí)估算保護(hù)安裝處到故障點(diǎn)的等效阻抗,動(dòng)態(tài)調(diào)整距離保護(hù)的阻抗定值。例如,采用阻抗圓特性的距離保護(hù),通過(guò)系統(tǒng)等效阻抗估算值調(diào)整阻抗圓的半徑與圓心位置,使保護(hù)范圍自適應(yīng)系統(tǒng)狀態(tài)變化,避免因系統(tǒng)阻抗變化導(dǎo)致的保護(hù)范圍偏移。
? 基于多目標(biāo)優(yōu)化的定值整定算法:以“靈敏性最高、選擇性最優(yōu)、動(dòng)作時(shí)限最短”為優(yōu)化目標(biāo),構(gòu)建多目標(biāo)優(yōu)化模型,通過(guò)遺傳算法、粒子群優(yōu)化算法等智能優(yōu)化算法求解最優(yōu)保護(hù)定值。例如,采用粒子群優(yōu)化算法,將保護(hù)定值作為粒子,以靈敏系數(shù)、選擇性系數(shù)、動(dòng)作時(shí)限為適應(yīng)度函數(shù),通過(guò)粒子迭代尋優(yōu),得到不同運(yùn)行模式下的最優(yōu)定值組合。
4. 保護(hù)動(dòng)作邏輯優(yōu)化算法:提升保護(hù)可靠性的關(guān)鍵手段
針對(duì)微電網(wǎng)故障電流雙向、故障類(lèi)型復(fù)雜的特點(diǎn),需優(yōu)化保護(hù)動(dòng)作邏輯,核心算法包括方向判據(jù)優(yōu)化算法、故障類(lèi)型識(shí)別算法、自適應(yīng)重合閘算法:
? 方向判據(jù)優(yōu)化算法:通過(guò)故障電流與電壓的相位關(guān)系,區(qū)分故障電流方向,常用算法包括基于序分量的方向判據(jù)、基于暫態(tài)功率的方向判據(jù)。例如,基于負(fù)序分量的方向判據(jù),利用故障時(shí)負(fù)序電流與負(fù)序電壓的相位關(guān)系判斷故障方向,不受負(fù)荷電流與正序分量影響,適用于雙向故障電流場(chǎng)景;基于暫態(tài)功率的方向判據(jù),通過(guò)小波變換提取暫態(tài)電流與電壓的能量特征,判斷故障方向,響應(yīng)速度快,適用于暫態(tài)故障。
? 故障類(lèi)型識(shí)別算法:通過(guò)故障特征提取結(jié)果,區(qū)分三相短路、單相接地、兩相短路等故障類(lèi)型,為保護(hù)動(dòng)作策略?xún)?yōu)化提供依據(jù)。例如,通過(guò)分析各相電流、電壓的幅值變化與相位關(guān)系,構(gòu)建故障類(lèi)型識(shí)別矩陣,當(dāng)某一相電流驟增、電壓驟降,且零序分量顯著時(shí),判定為單相接地故障,觸發(fā)相應(yīng)的保護(hù)動(dòng)作邏輯(如單相跳閘)。
三、故障定位的算法基礎(chǔ):精準(zhǔn)鎖定故障點(diǎn)的核心技術(shù)
故障定位的核心目標(biāo)是快速、精準(zhǔn)確定微電網(wǎng)故障點(diǎn)的位置,為故障隔離與恢復(fù)供電提供依據(jù)。其算法體系根據(jù)技術(shù)原理可分為“基于阻抗的定位算法”“基于行波的定位算法”“基于數(shù)據(jù)驅(qū)動(dòng)的定位算法”三大類(lèi),各類(lèi)算法適用于不同的微電網(wǎng)結(jié)構(gòu)與故障場(chǎng)景。
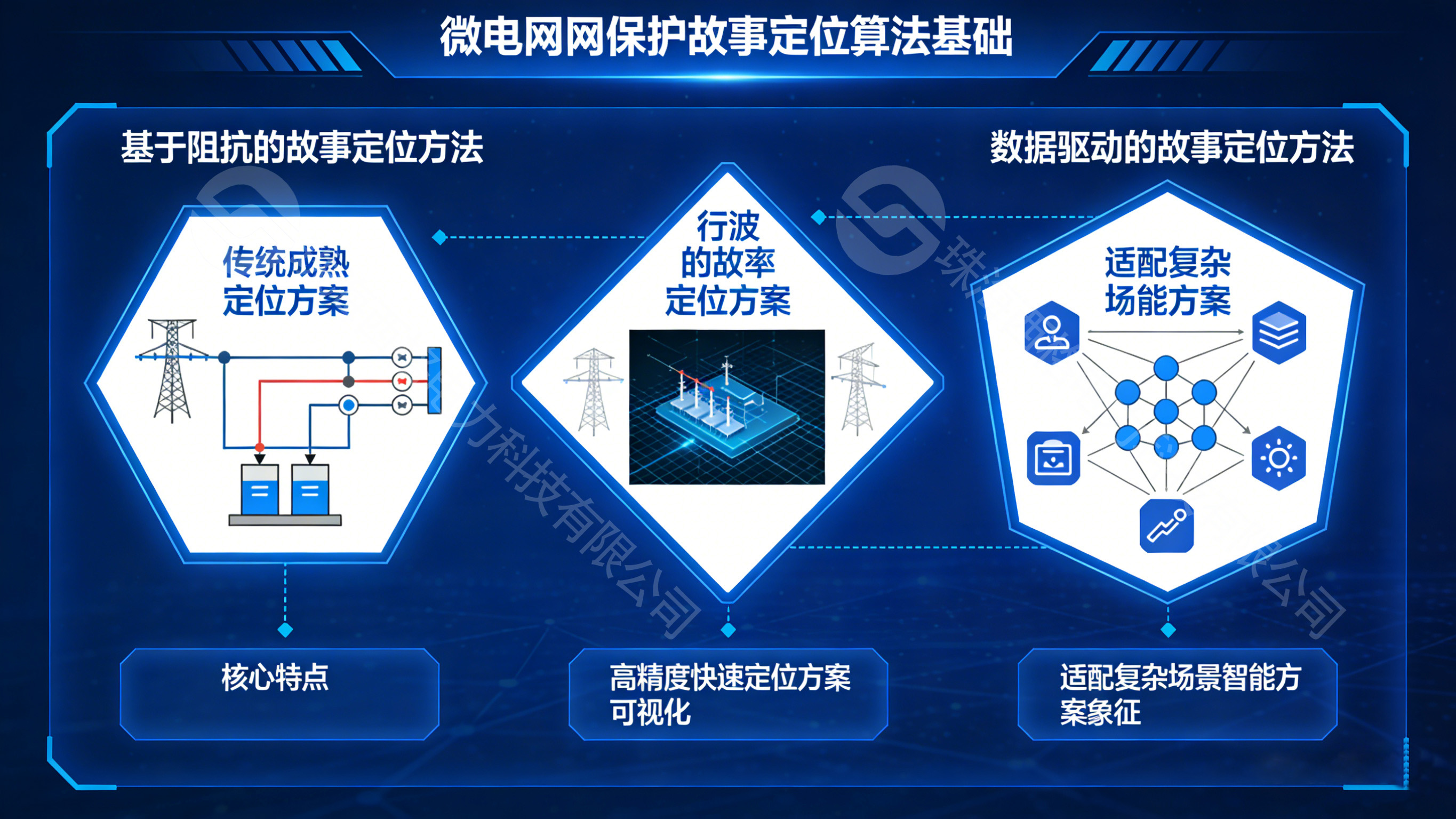
1. 基于阻抗的故障定位算法:傳統(tǒng)成熟的定位方案
核心原理是通過(guò)測(cè)量保護(hù)安裝處的電壓、電流,計(jì)算保護(hù)安裝處到故障點(diǎn)的阻抗,再結(jié)合線路參數(shù)確定故障點(diǎn)位置。適用于結(jié)構(gòu)簡(jiǎn)單、線路參數(shù)已知的微電網(wǎng),核心算法包括單端阻抗法、雙端阻抗法、多端阻抗法:
? 單端阻抗法:僅利用單個(gè)保護(hù)安裝處的電壓、電流數(shù)據(jù)計(jì)算故障阻抗,公式為Z_{fault} = frac{U}{I}(U為保護(hù)安裝處母線電壓,I為故障電流),結(jié)合線路單位長(zhǎng)度阻抗z_0,得到故障點(diǎn)距離l = frac{Z_{fault}}{z_0}。該算法結(jié)構(gòu)簡(jiǎn)單、成本低,但受故障類(lèi)型(如高阻故障)、負(fù)荷電流、系統(tǒng)阻抗影響較大,定位誤差較大,適用于對(duì)定位精度要求不高的場(chǎng)景。
? 雙端阻抗法:利用故障線路兩端的電壓、電流數(shù)據(jù),通過(guò)分布參數(shù)模型計(jì)算故障點(diǎn)位置,核心公式為l = frac{1}{2} left( L + frac{U_1 - U_2}{I_1 - I_2} cdot frac{1}{z_0} right)(L為線路總長(zhǎng),U_1、U_2為兩端電壓,I_1、I_2為兩端電流)。該算法消除了單端阻抗法中系統(tǒng)阻抗與負(fù)荷電流的影響,定位精度顯著提升,但需要兩端數(shù)據(jù)的同步采集,對(duì)通信系統(tǒng)要求較高。
? 多端阻抗法:適用于多分支的微電網(wǎng)結(jié)構(gòu),利用故障區(qū)域多個(gè)節(jié)點(diǎn)的電壓、電流數(shù)據(jù),構(gòu)建多變量方程組,通過(guò)最小二乘法求解故障點(diǎn)位置。該算法可適應(yīng)復(fù)雜的微電網(wǎng)拓?fù)洌珨?shù)據(jù)處理量較大,對(duì)算法的實(shí)時(shí)性要求較高。
2. 基于行波的故障定位算法:高精度快速定位方案
核心原理是利用故障發(fā)生時(shí)產(chǎn)生的暫態(tài)行波(電壓行波、電流行波)在線路中的傳播特性,通過(guò)檢測(cè)行波的到達(dá)時(shí)間與傳播速度,計(jì)算故障點(diǎn)位置。該算法定位精度高、響應(yīng)速度快,適用于復(fù)雜微電網(wǎng)與高阻故障場(chǎng)景,核心算法包括單端行波法、雙端行波法、基于小波變換的行波檢測(cè)算法:
? 雙端行波法:通過(guò)檢測(cè)故障行波到達(dá)線路兩端的時(shí)間差Delta t,結(jié)合行波傳播速度v(近似為光速的0.8~0.9倍),計(jì)算故障點(diǎn)位置l = frac{v cdot Delta t}{2}。該算法定位精度高(誤差可控制在幾十米內(nèi)),不受故障電阻、系統(tǒng)阻抗影響,但需實(shí)現(xiàn)兩端行波到達(dá)時(shí)間的精準(zhǔn)同步,常用全球定位系統(tǒng)(GPS)實(shí)現(xiàn)時(shí)間同步,同步精度需達(dá)到微秒級(jí)。
? 單端行波法:通過(guò)檢測(cè)故障行波的入射波與反射波到達(dá)保護(hù)安裝處的時(shí)間差Delta t_{inc-ref},計(jì)算故障點(diǎn)位置l = frac{v cdot Delta t_{inc-ref}}{2}。該算法無(wú)需兩端同步,成本較低,但受行波反射、折射的影響,反射波檢測(cè)難度較大,定位精度相對(duì)雙端法略低。為提升反射波檢測(cè)精度,常結(jié)合小波變換算法提取行波的暫態(tài)特征,識(shí)別入射波與反射波的到達(dá)時(shí)刻。
? 基于小波變換的行波檢測(cè)算法:利用小波變換的時(shí)域-頻域局部化特性,提取行波信號(hào)的模極大值,以此確定行波到達(dá)時(shí)刻。例如,采用db4小波對(duì)故障電流信號(hào)進(jìn)行多尺度分解,當(dāng)分解后的小波系數(shù)出現(xiàn)模極大值時(shí),判定為行波到達(dá)時(shí)刻,該算法可有效抑制噪聲干擾,提升行波檢測(cè)的精準(zhǔn)性。
3. 基于數(shù)據(jù)驅(qū)動(dòng)的故障定位算法:適配復(fù)雜場(chǎng)景的智能方案
針對(duì)微電網(wǎng)拓?fù)鋸?fù)雜、故障特征多變的特點(diǎn),基于數(shù)據(jù)驅(qū)動(dòng)的算法通過(guò)大量故障數(shù)據(jù)訓(xùn)練模型,實(shí)現(xiàn)故障點(diǎn)的智能定位,核心算法包括基于機(jī)器學(xué)習(xí)的定位算法、基于深度學(xué)習(xí)的定位算法:
? 基于機(jī)器學(xué)習(xí)的定位算法:通過(guò)提取故障電壓、電流信號(hào)的特征(如幅值、相位、諧波分量、小波系數(shù)),構(gòu)建特征向量,利用支持向量機(jī)(SVM)、隨機(jī)森林、決策樹(shù)等機(jī)器學(xué)習(xí)模型訓(xùn)練故障位置與特征向量的映射關(guān)系。例如,采用支持向量機(jī)算法,將不同故障點(diǎn)的特征向量作為訓(xùn)練樣本,以故障點(diǎn)距離為輸出標(biāo)簽,訓(xùn)練完成后,輸入新的故障特征向量即可快速輸出故障點(diǎn)位置。該算法適用于拓?fù)湎鄬?duì)固定的微電網(wǎng),具備較好的泛化能力。
? 基于深度學(xué)習(xí)的定位算法:利用神經(jīng)網(wǎng)絡(luò)的深層特征提取能力,直接從原始電壓、電流信號(hào)中學(xué)習(xí)故障位置的映射關(guān)系,無(wú)需人工提取特征。常用模型包括卷積神經(jīng)網(wǎng)絡(luò)(CNN)、循環(huán)神經(jīng)網(wǎng)絡(luò)(RNN)、長(zhǎng)短時(shí)記憶網(wǎng)絡(luò)(LSTM)。例如,采用CNN模型,將原始故障電流信號(hào)作為輸入,通過(guò)卷積層、池化層提取深層故障特征,通過(guò)全連接層輸出故障點(diǎn)位置;LSTM模型則適用于處理時(shí)序故障信號(hào),通過(guò)記憶單元捕捉故障信號(hào)的時(shí)序特征,提升定位精度。該算法適用于拓?fù)鋸?fù)雜、故障類(lèi)型多樣的微電網(wǎng),但需要大量高質(zhì)量的故障數(shù)據(jù)進(jìn)行模型訓(xùn)練。
四、自適應(yīng)保護(hù)與故障定位的協(xié)同優(yōu)化算法
自適應(yīng)保護(hù)與故障定位并非孤立工作,兩者的協(xié)同優(yōu)化可顯著提升微電網(wǎng)保護(hù)系統(tǒng)的整體性能,核心協(xié)同算法包括“定位結(jié)果輔助保護(hù)定值整定”“保護(hù)動(dòng)作反饋優(yōu)化定位模型”兩類(lèi):

(一)定位結(jié)果輔助保護(hù)定值整定
故障定位算法輸出的故障點(diǎn)距離信息,可輔助自適應(yīng)保護(hù)調(diào)整定值與動(dòng)作時(shí)限。例如,當(dāng)定位結(jié)果顯示故障點(diǎn)距離保護(hù)安裝處較近時(shí),說(shuō)明故障嚴(yán)重程度較高,可降低保護(hù)動(dòng)作時(shí)限,實(shí)現(xiàn)快速跳閘;當(dāng)定位結(jié)果顯示故障點(diǎn)距離較遠(yuǎn)時(shí),適當(dāng)提高動(dòng)作時(shí)限,保障選擇性。
(二)保護(hù)動(dòng)作反饋優(yōu)化定位模型
將保護(hù)動(dòng)作的結(jié)果(如是否成功切除故障、是否誤動(dòng))作為反饋信號(hào),優(yōu)化故障定位模型的參數(shù)。例如,若定位結(jié)果導(dǎo)致保護(hù)誤動(dòng),通過(guò)反饋信號(hào)調(diào)整數(shù)據(jù)驅(qū)動(dòng)定位模型的權(quán)重系數(shù),提升后續(xù)定位精度;若保護(hù)成功切除故障,將該次故障數(shù)據(jù)加入模型訓(xùn)練集,優(yōu)化模型泛化能力。
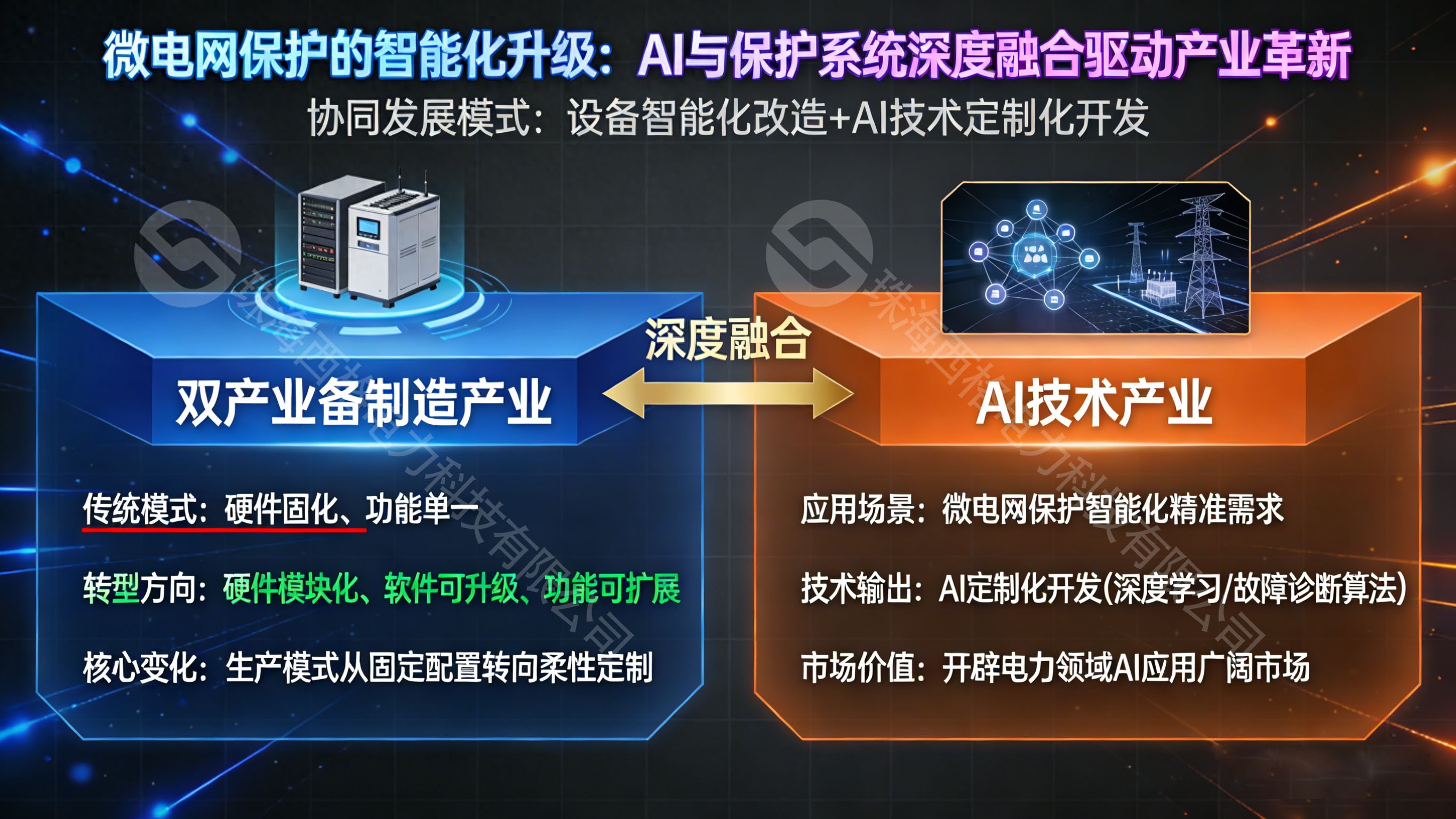
微電網(wǎng)保護(hù)理論的核心是自適應(yīng)保護(hù)與故障定位,其算法基礎(chǔ)圍繞“動(dòng)態(tài)適配系統(tǒng)狀態(tài)”與“精準(zhǔn)鎖定故障點(diǎn)”展開(kāi)。自適應(yīng)保護(hù)通過(guò)系統(tǒng)狀態(tài)感知、故障特征提取、定值動(dòng)態(tài)整定與動(dòng)作邏輯優(yōu)化,解決了傳統(tǒng)保護(hù)對(duì)微電網(wǎng)運(yùn)行模式變化、故障電流多變的適配性不足問(wèn)題;故障定位通過(guò)阻抗法、行波法、數(shù)據(jù)驅(qū)動(dòng)法等算法,實(shí)現(xiàn)了不同場(chǎng)景下故障點(diǎn)的精準(zhǔn)定位。隨著微電網(wǎng)向規(guī)模化、智能化方向發(fā)展,未來(lái)的算法將向“多算法融合”“數(shù)字孿生賦能”“邊緣計(jì)算協(xié)同”方向演進(jìn),通過(guò)融合傳統(tǒng)算法與智能算法的優(yōu)勢(shì),結(jié)合數(shù)字孿生技術(shù)實(shí)現(xiàn)保護(hù)與定位的虛擬仿真與動(dòng)態(tài)優(yōu)化,依托邊緣計(jì)算提升算法的實(shí)時(shí)性與可靠性。深入掌握自適應(yīng)保護(hù)與故障定位的算法基礎(chǔ),是保障微電網(wǎng)安全穩(wěn)定運(yùn)行的關(guān)鍵,也為新型電力系統(tǒng)的保護(hù)技術(shù)發(fā)展提供了核心理論支撐。
以上是由智能微電網(wǎng)/虛擬電廠/綠電直連管理系統(tǒng)廠家西格電力分享,歡迎您閱讀、點(diǎn)贊。
-
逆變器
+關(guān)注
關(guān)注
304文章
5202瀏覽量
217308 -
微電網(wǎng)
+關(guān)注
關(guān)注
24文章
1134瀏覽量
37084
發(fā)布評(píng)論請(qǐng)先 登錄
微電網(wǎng)保護(hù)關(guān)鍵技術(shù)如何保障城市民生園區(qū)供電可靠性?

微電網(wǎng)保護(hù)的關(guān)鍵技術(shù)在城市商業(yè)園區(qū)場(chǎng)景中的應(yīng)用案例分享
微電網(wǎng)保護(hù)的關(guān)鍵技術(shù)在城市商業(yè)/民生園區(qū)場(chǎng)景中的應(yīng)用

微電網(wǎng)穩(wěn)定性理論在實(shí)際應(yīng)用中面臨哪些挑戰(zhàn)

微電網(wǎng)保護(hù)的關(guān)鍵技術(shù)在工業(yè)園區(qū)應(yīng)用場(chǎng)景中有哪些挑戰(zhàn)

微電網(wǎng)能量平衡理論:核心原理與實(shí)現(xiàn)條件

微電網(wǎng)保護(hù)的關(guān)鍵技術(shù)在工業(yè)園區(qū)應(yīng)用場(chǎng)景中的應(yīng)用

微電網(wǎng)保護(hù)的關(guān)鍵技術(shù)有哪些?
微電網(wǎng)保護(hù)的核心挑戰(zhàn)有哪些?

微電網(wǎng)保護(hù)的發(fā)展趨勢(shì)對(duì)相關(guān)產(chǎn)業(yè)有哪些影響?
微電網(wǎng)保護(hù)的發(fā)展趨勢(shì)是什么?

不止于快速斷電:弧光保護(hù)如何扛起電網(wǎng)“韌性安全”的戰(zhàn)略大旗?

基于FPGA LMS算法的自適應(yīng)濾波器設(shè)計(jì)



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論