 自動駕駛汽車如何看清并理解交通標志?
自動駕駛汽車如何看清并理解交通標志?

[首發于智駕最前沿微信公眾號]在我們開車的時候,想順利地完成駕駛任務,會本能地注意前方的限速牌、停車讓行標志或轉彎指示等。自動駕駛汽車想安全地運行,同樣需要這樣的能力。自動駕駛汽車通過攝像頭、雷達等傳感器“觀察”周圍環境,并由計算機系統理解和處理這些信息,在眾多任務中,交通標志的識別是關鍵一環。自動駕駛汽車只有準確識別出不同的交通標志,才能在實際行駛中按規則行駛,并做出正確決策。

交通標志識別的必要性
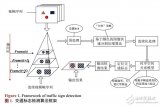
自動駕駛系統里感知模塊其中一個目標,就是識別道路上的各種交通標志。交通標志識別通常被稱為TSR(Traffic Sign Recognition),主要是通過車載前向攝像頭捕捉道路場景圖像,然后經過一系列算法處理,最終呈現出我們能理解的交通標志信息。識別系統不僅要找出交通標志的位置,還要確認它是什么內容,然后把這些信息傳給車輛控制系統用于后續決策。這個技術在自動駕駛里非常重要,如若識別錯誤,車輛可能會按照錯誤的規則行駛,還會帶來安全隱患。

圖片源自:網絡
交通標志識別一般分為檢測與分類兩個關鍵環節。檢測是將圖像中可能包含交通標志的部分找出來,分類則是判斷這個標志具體表示什么內容。這個過程和人類看圖類似,但對機器而言會涉及復雜的視覺算法和大量樣本學習。自動駕駛車輛會將這兩步緊密結合,同時還會考慮光照、遮擋、運動模糊等復雜場景對于交通標志識別的影響。

感知世界:從攝像頭采集圖像開始
要識別交通標志,自動駕駛汽車需要先“看到”這些標志。自動駕駛汽車前方一般會裝有高分辨率的攝像頭,以及激光雷達、毫米波雷達等傳感器,但是交通標志識別這項任務,主要還是由攝像頭完成。攝像頭可以像人眼一樣看到道路前方的交通標志、車輛、行人、背景建筑等視覺信息,從而為自動駕駛汽車識別交通標志提供信息基礎。
攝像頭采集下來的原始圖像會有噪聲、曝光不均、運動模糊等問題,為了提高后續識別的準確率,需要對這些圖像進行預處理。常見的預處理方法包括顏色空間轉換、噪聲濾波和圖像校正等,這些操作可以讓圖像更容易被算法理解。比如將RGB(紅綠藍)圖像轉換成HSV(色調、飽和度、亮度)空間,可有助于突出某些顏色范圍,從而更容易發現不同顏色的標志。
在采集和預處理之后,自動駕駛系統要做的就是找出圖像中可能包含交通標志的區域。早期的方法可以利用顏色、形狀等視覺特征進行檢測,像是紅色邊框的圓形可能是限速標志,三角形可能是警告類標志,這些特征有助于自動駕駛系統快速區分標志和背景。更先進的交通標志識別技術主要依靠深度學習算法,通過神經網絡模型自動學習大量標志樣本的特征,從而在復雜背景下也能準確檢測出交通標志。

深度學習如何幫助識別交通標志
在過去的十幾年里,傳統的圖像處理方法主要依賴人工設計的如邊緣、顏色等特征,但對于實際道路存在的復雜、變化多端的場景,這種方法容易受光照變化、遮擋、傾斜等因素的干擾,識別準確率有限。隨著深度學習特別是卷積神經網絡(CNN)技術的發展,交通標志識別進入了一個新的階段。深度學習模型可以從大量數據中自動學習特征,不需要人工反復設計特征規則,相對傳統方法來說,基于深度學習模型的識別方法魯棒性和準確率都會更高。
深度學習的核心是構建一個神經網絡模型,這個模型包含很多層計算單元(也叫神經元或者卷積層),這些層可以從簡單的邊緣到更復雜的形狀和結構,逐級提取圖像中的特征。神經網絡模型會先用大規模數據集進行訓練,這些數據集包含各種各樣的交通標志圖片,以及它們對應的標簽信息。訓練的過程其實就是讓模型逐漸學會把輸入的圖像映射到正確的標志類別上。常見的神經網絡架構包括VGG、ResNet等基礎網絡,以及用于目標檢測的YOLO系列、SSD、Faster R-CNN等模型,它們可以同時完成檢測和分類兩項任務。
以YOLO(You Only Look Once)模型為例,這類模型可以把整張圖像一次性輸入網絡,通過網絡對圖像進行網格劃分,并為每個區域預測是否包含目標以及目標類別,這樣不僅可以快速檢測到交通標志在哪兒,還能判斷它屬于哪種類型。在對YOLO v7、YOLO v8的實際測試中,識別準確率可以達到99%以上,這意味著在大多數場景下YOLO模型都能正確識別出交通標志。
當然,想讓這些深度學習模型識別效果的準確率更高,并不是簡單提供更多圖像給其訓練就可以的,而是要進行大量多樣化的訓練,訓練的數據集中要包括白天、夜晚、雨霧等各種環境下拍攝的標志圖像。通過多樣性的數據訓練,可以讓模型的泛化能力更強,不易被復雜路況干擾。此外,還需對訓練數據進行增強處理,比如對原始圖像進行旋轉、裁剪、亮度調整等操作,可以讓模型學會在更多不同情況下識別標志。

檢測與分類:如何判斷這是什么標志
在識別流程里,檢測和分類是兩個相互關聯但有所不同的環節。檢測是將圖像中可能包含交通標志的區域框選出來,不去管它具體是什么內容;分類則是在檢測出一塊區域后判斷它是哪種標志。
在自動駕駛技術初期,這兩個步驟是分開處理的,即先做特征提取和區域提議,然后把候選區域送入分類器判斷類別。隨著深度學習模型的普及,這兩個步驟便被統一到一個端到端的框架里,通過一個模型可以同時完成檢測位置和分類結果的任務。這樣做的好處是速度更快、實時性更強,適合需要高速響應的自動駕駛場景。

圖片源自:網絡
在交通標志的檢測環節中,經常會出現標志大小變化大、角度不一致及標志被部分遮擋等問題,這無疑增加了檢測的難度。為了應對這個問題,算法會采用多尺度特征提取技術,讓大模型在不同分辨率的特征圖上都能捕捉到目標信息,從而提升對遠近標志的檢測能力。
在檢測到交通標志后,下一步要做的就是分類,分類要做的就是判斷檢測到的目標具體屬于哪種交通標志,這里會涉及數十甚至上百種類別。深度學習網絡在學習過程中,會把每種類別的交通標志特征編碼成內部向量空間的模式。當大模型看到新的測試圖像時,它會計算圖像和這些模式的匹配程度,最后輸出一個概率分布,讓系統知道哪個類別最有可能。

結合時間和上下文信息讓判斷更穩妥
單幀圖像的識別有時會受光照、雨雪、車速等因素影響出現誤判。為了減少這種情況,自動駕駛系統還會結合時間維度和上下文信息來增強識別的穩定性。簡單來說就是不會憑一張照片判斷交通標識的類別,而是會把連續的多幀圖像結果融合考慮。如果前幾幀識別到的是“限速60”的含義,而當前幀不穩定導致識別結果有小變化,系統可以結合歷史信息做出綜合判斷,從而避免因為一兩幀出錯而做出錯誤決策。

圖片源自:網絡
此外,自動駕駛車輛也會把交通標志識別結果與高精地圖數據結合在一起。高精地圖里會提前包含道路上常見的交通標志位置和類型信息,當車輛識別到某個標志時,可以和地圖數據校對,從而提高準確率,尤其是在標志因為遮擋或損壞時可以通過這種方法提供補充參考。雖然這種做法不是必須的,但可以提高整體魯棒性。

識別結果如何指導自動駕駛決策
當自動駕駛系統識別出交通標志后,這些信息需要轉化成可用的指令送給自動駕駛的決策和控制模塊。例如識別到“限速50”這個標志,控制系統就會把目前設定的最高速度調整到相應數值;當識別到“停車讓行”標志時,就會規劃車輛減速并停在停止線前;遇到“禁止左轉”標志時,規劃路徑時就不會選擇左轉路線。交通標志的識別結果在這些規則執行中可以起到直接的輸入作用。
在整個自動駕駛系統中,交通標志的識別只是感知的一部分,它會和車輛、行人、路緣、車道線等其他感知信息一起形成對周圍環境的整體理解。決策模塊會把識別到的信息綜合起來,按照交通規則和安全策略制定下一步行動,然后將控制指令傳給車輛的執行部件。這樣的流程可以讓自動駕駛汽車不僅能“看見”標志,還能基于這些信息安全地行駛。

最后的話
自動駕駛車輛之所以能識別交通標志,是借助了攝像頭采集視覺輸入,再通過預處理、深度學習模型檢測和分類,結合時間信息和地圖數據等手段綜合判斷得到的。識別結果會被用于指導車輛按交通規則行駛。這個過程涉及多個環節和先進算法,每一步都要經過精心設計和大量調試,才能在復雜的現實道路環境中保持足夠高的可靠性。
審核編輯 黃宇
-
自動駕駛
+關注
關注
793文章
14882瀏覽量
179854
發布評論請先 登錄
FPGA在自動駕駛領域有哪些應用?
谷歌的自動駕駛汽車是醬紫實現的嗎?
【話題】特斯拉首起自動駕駛致命車禍,自動駕駛的冬天來了?
[科普] 谷歌自動駕駛汽車發展簡史,都來了解下吧!
自動駕駛的到來
邁向自動駕駛和電動汽車之路研討會
如何讓自動駕駛更加安全?
真正步入自動駕駛汽車需要多久?
自動駕駛汽車的處理能力怎么樣?
實用交通標志自動識別方法
自然場景下交通標志的自動識別算法
基于顏色的圖像快速分割的交通標志檢測



 工商網監
工商網監
評論