 基于ARMxy BL370的邊緣智能分揀系統解決方案
基于ARMxy BL370的邊緣智能分揀系統解決方案

在物流轉運中心、電商倉庫及智能制造產線末端,智能分揀系統的處理能力、準確性與可靠性直接影響著整體運營效率。隨著訂單向碎片化、實時化發展,傳統分揀系統在應對海量SKU、動態路由和系統維護方面面臨新的要求。本文旨在探討一種基于鋇錸技術ARMxyBL370系列邊緣控制器的智能分揀系統方案,從工程角度分析其如何應對現有挑戰。
一、智能分揀系統面臨的主要挑戰
1.大規模實時控制與同步難題:現代化的交叉帶、滑塊式分揀系統往往包含數十甚至上百個獨立驅動的分揀單元(小車或滑塊)。傳統采用PLC配合現場總線(如PROFIBUS、CANopen)的控制方式,在節點數量增多時,通訊負載加大,可能導致指令周期延長、同步性能下降。這會在高速運行(如2.5米/秒以上)時,引發單元間動作不協調、包裹拋投不準或系統抖動,限制分揀效率的進一步提升。
2.海量傳感器信號處理的實時性與可靠性:系統依賴遍布輸送線的光電、尺寸測量、稱重、視覺等多種傳感器進行包裹感知與定位。這些傳感器信號數量龐大、響應要求高(毫秒級)。傳統IO模塊掃描周期較長,在高速分揀場景下,可能出現信號漏檢或處理延遲,導致包裹丟失、目的地誤判,需要人工干預進行糾錯,影響系統連續運行的穩定性。
3.系統網絡復雜,故障定位與恢復耗時:控制網絡、傳感器網絡與執行器網絡往往交織,任何節點的通訊中斷、干擾都可能導致局部或全線停機。故障發生時,依賴人工在現場逐點排查,故障平均修復時間(MTTR)較長,影響分揀中心的連續作業能力。
4.分揀邏輯調整不夠靈活:分揀目的地與包裹信息的匹配邏輯,常以相對固化的方式編寫在控制器程序中。當客戶分揀需求、路由策略頻繁變動時,修改與驗證程序邏輯需要專業人員參與且耗時,系統難以快速適應業務變化。
二、解決方案概述:基于BL370的分布式邊緣控制架構
本方案采用“邊緣統一控制+高速實時網絡”的架構,以ARMxyBL370系列作為核心處理單元。
1.控制核心:采用BL372B作為主控制器,其搭載的瑞芯微RK3562J處理器,四核ARMCortex-A53可高效處理路由邏輯、數據通信及人機交互;ARMCortex-M0協處理器與Linux-RT-5.10.198實時內核共同為底層IO處理和多軸同步控制提供確定性的運行環境。
2.高速控制網絡:通過內置的IgHEtherCAT主站,構建一個統一的控制骨干網。所有分揀單元的伺服驅動器、以及分布式IO站均可作為EtherCAT從站接入。EtherCAT的行拓撲和分布式時鐘機制,允許在單網段內高效連接大量節點,并實現微秒級的同步控制,確保上百個分揀單元動作協調一致。
3.分布式感知與邊緣處理:在關鍵傳感區域,可部署配備了高速IO模塊的BL370或IO耦合器,實現傳感信號的本地化快速采集與預處理,減輕主站負荷,提升系統整體響應速度。
三、具體IO需求與選型配置
分揀系統的可靠性極大程度依賴于對傳感器信號的精準、即時捕獲。
1.核心控制單元選型
主控制器:BL372B(3個EtherCAT網口,雙Y槽,可擴展更多功能)。1-2個網口用于連接分揀單元伺服網絡與分布式IO網絡,另1個用于連接上層WCS(倉庫控制系統)網絡。
計算核心:SOM372(RK3562J,32GBeMMC,4GBLPDDR4X),充足的存儲空間可用于存儲復雜的分揀路由表和日志。
操作系統:Linux-RT-5.10.198實時內核,保障對海量IO掃描和運動控制的實時性要求。
2.關鍵IO選型:高速傳感信號采集
包裹的動態檢測與定位是分揀動作的起點,對數字輸入(DI)的響應速度和抗干擾能力有較高要求。
| 功能模塊 | 信號需求 | 選型型號 | 功能說明 |
| 包裹位置檢測 | 多路高速數字輸入(DI),連接用于檢測包裹到達、位置同步的光電傳感器或接近開關。 | X14板(4路DI模塊) | 該模塊適用于快速捕獲傳感器的開關信號。在分揀系統中,通常用于關鍵位置如“上包位”、“分揀格口觸發位”的包裹檢測。其穩定的電氣特性有助于在電氣環境復雜的現場減少誤信號。 |
| 擴展說明 | 對于更大規模的傳感網絡,單個X14板點數可能不足。此時,可通過EtherCAT連接遠程IO站(如鋇錸BL200系列耦合器,配合多塊DI模塊),將上百個傳感器信號匯總后,再通過EtherCAT網絡上傳給BL370主站,實現布線簡化與集中管理。 | ||
| 其他功能IO | 數字輸出(DO)用于控制指示燈、報警器;模擬量輸入(AI)用于連接稱重儀等。 | X15板(DO)、Y31板(AI)等 | 根據系統實際需求,選擇對應的模塊進行補充配置,實現完整的控制與反饋功能。 |
3.軟件功能實現
QuickConfig邏輯可視化配置:將分揀目的地與包裹條碼、尺寸、重量等信息的映射關系,從傳統的代碼編程轉變為圖形化、表格化的配置工具。運維人員可通過界面修改路由規則、格口對應關系,并在線驗證與下發,使分揀邏輯的調整更快捷,降低對專業開發人員的依賴。
BLRAT遠程診斷與維護:當系統出現網絡報警、伺服故障或分揀異常時,工程師可通過BLRAT工具,從遠端安全接入現場的BL370控制器。可以實時查看EtherCAT網絡拓撲狀態、各從站通訊質量、IO信號實時狀態、系統日志等,進行初步的故障定位與分析,指導現場人員或自行遠程處理部分軟件類問題,有助于縮短停機時間。
四、邊緣IO模塊與架構的技術特點分析
在智能分揀這類大規模IO應用中,控制架構與IO選型影響著系統的性能與可維護性。
| 對比方面 | 傳統集中式IO方案(大型PLC+遠程IO) | 基于BL370與EtherCAT的分布式方案 | 方案特點分析 |
| 系統擴展性與布線 | 遠程IO站通過專屬現場總線(如PROFINETIO)連接,擴展節點數和距離受總線規格限制,從站數量多時配置復雜。電纜通常需要逐點敷設至中心柜。 | EtherCAT采用開放式行拓撲,添加或移除從站靈活,理論上單個網段可連接更多設備。可配合本地IO耦合器,實現傳感器就近接入,大幅減少現場至控制柜的電纜長度與數量,降低布線成本和復雜度。 | 分布式架構在應對大規模、長距離的IO應用時,在工程實施和后期擴展上可能更具靈活性。 |
| 實時性與同步性能 | 主流工業以太網(如PROFINET)的IRT等實時協議性能優異,但在連接上百個伺服軸且要求高同步時,對網絡規劃和主站性能要求較高 。 | EtherCAT的數據幀“飛讀飛寫”處理機制和硬件同步(DC)功能,使其在多軸同步和大量IO數據交換場景下,具有較低的協議開銷和穩定的同步性能,適合于分揀系統這類多軸協同場景。 | 為控制上百個需要協同動作的分揀單元提供了低延遲、高確定性的通信基礎。 |
| 故障診斷與網絡管理 | 網絡診斷依賴于特定廠商的軟件工具,對不同品牌設備組成的異構網絡診斷深度可能有限。 | IgHEtherCAT主站作為開源方案,提供豐富的底層狀態信息。配合BLRAT等工具,可以從主站角度清晰監控整個EtherCAT環網中每一個從站的通訊狀態、錯誤計數器,便于進行網絡層面的健康度評估與故障隔離。 | 增強了用戶對控制網絡透明化管理和深度診斷的能力。 |
| 硬件集成與成本構成 | 成熟穩定,但高端多軸運動控制PLC和專用網絡模塊成本通常較高。 | 采用基于通用ARM處理器和開源協議棧的BL370,在滿足同等性能需求下,可能在硬件成本上提供一種不同的選擇。同時,模塊化的IO板卡可按需配置,避免資源浪費。 | 在追求特定性能價格比或定制化需求的場景下,該方案具有一定的參考價值。 |
五、總結
以ARMxyBL370邊緣控制器為核心,結合EtherCAT實時工業網絡和模塊化IO系統,為構建新一代智能分揀系統提供了一套可行的技術思路。該方案著重于解決大規模伺服同步控制、海量傳感器高速可靠采集、系統故障快速診斷以及分揀業務邏輯靈活部署等工程實際問題。
通過利用EtherCAT在高密度節點同步控制方面的特性,以及BL370在邊緣計算和開放生態方面的特點,該方案旨在提升分揀系統的運行效率、可靠性和可維護性,以適應現代物流倉儲領域對柔性化與智能化的要求。它為系統集成商和設備制造商在方案設計時,提供了除傳統大型PLC之外的另一條技術路徑參考。
審核編輯 黃宇
-
ARM
+關注
關注
135文章
9554瀏覽量
392117
發布評論請先 登錄
基于BL370邊緣控制器的智能擠出機一體化解決方案
基于BL370邊緣控制器的芯片分選機一體化控制解決方案
基于BL370邊緣控制器的PCB壓合設備工藝數據化控制解決方案
基于BL370邊緣控制器的晶圓傳輸機器人集成化控制解決方案
ARMxy + FUXA 工業邊緣可視化方案|一臺設備搞定采集、控制與上云
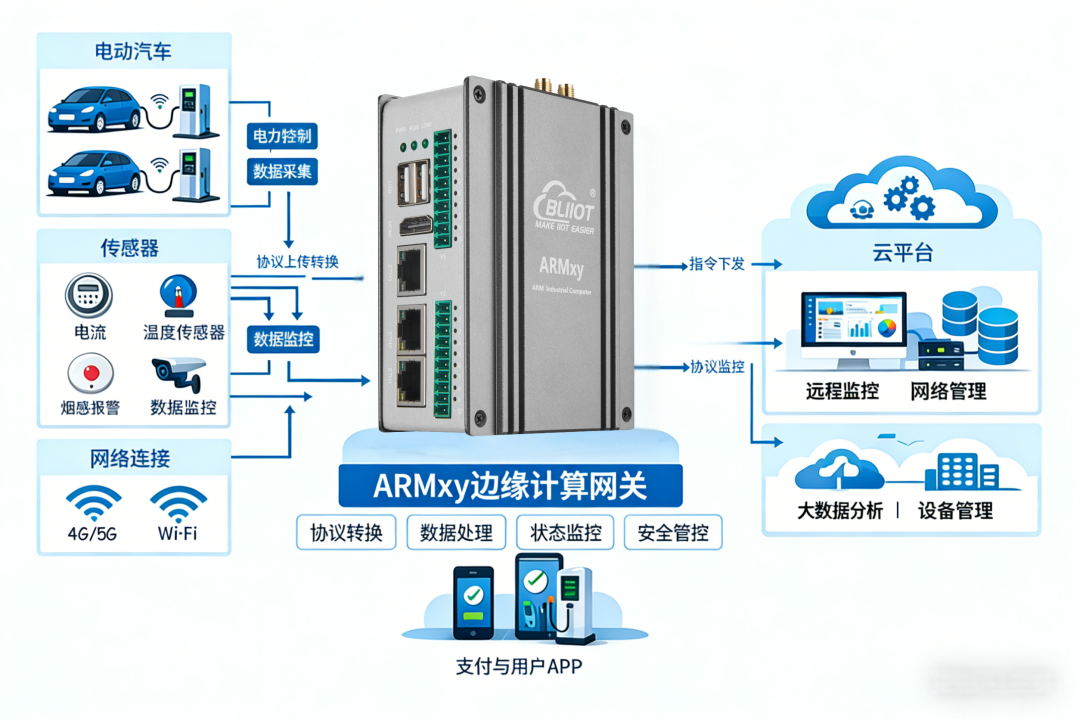
ARMxy 充電樁邊緣管理方案|智能運維與規模化運營解決方案
基于BL370邊緣控制器的灌裝旋蓋一體機智能化解決方案
基于鋇錸BL370的邊緣智能復合材料鋪絲機控制系統解決方案
基于鋇錸BL370的邊緣智能折彎機控制系統解決方案
基于鋇錸BL370的智能激光切割機一體化控制與AI工藝優化解決方案
Delta并聯機器人高速抓放應用解決方案:基于BL350與EtherCAT的硬實時控制
基于BL350與IGH?EtherCAT的硬實時控制解決方案
SCARA機器人高速高精拾放解決方案:基于ARMxy BL350系列的邊緣智能控制平臺
YOLO + OpenPLC + ARMxy:工業智能化視覺識別、邊緣計算、工業控制的“三位一體”解決方案




 工商網監
工商網監
評論