 CW32L012對MPU6050的數據進行卡爾曼濾波
CW32L012對MPU6050的數據進行卡爾曼濾波

卡爾曼濾波(最優估計)
一、什么是卡爾曼濾波
通俗理解卡爾曼濾波:一個「會自動調權重的裁判」
卡爾曼濾波解決的核心問題是:你有兩個途徑(測量和預估得到)知道同一個東西的狀態,但這兩個途徑都不準,卡爾曼幫你算出最準的結果
最優估計公式:


二、為什么這里要用卡爾曼
下面是MPU6050加速度計和陀螺儀的優缺點:


總的來說:
陀螺儀動態的時候輸出的值精準,但是靜止的時候會有漂移
而加速度計就反過來了,加速度計靜態的時候輸出的值準,但是動態特性差
MPU6050 的陀螺儀和加速度計是 “天生的互補搭檔”,但單靠其中一個或簡單濾波,要么漂移、要么動態失真;而卡爾曼濾波的核心是 “動態加權的最優估計” —— 它能根據 MPU6050 的工作狀態(靜態 / 動態),自動判斷兩個傳感器的可靠性,把陀螺儀的 “動態精準” 和加速度計的 “靜態穩定” 結合起來,最終輸出既無漂移、又能快速響應的 roll/pitch 角度,這是其他濾波方式無法實現的。
三、卡爾曼濾波實現
一、思路
根據之前的內容,我們已經得到了加速度計解算的roll和pitch,以及角速度計解算的roll、pitch、yaw,因為加速度計無法解算yaw,所以這里只對roll和pitch做數據融合
卡爾曼最優估計的核心目標是融合 “加速度計解算的角度” 和 “陀螺儀角速度積分的角度”,最終輸出最優的角度估計。整體邏輯分為兩大階段:
預測階段:基于陀螺儀角速度(扣除偏置后)積分,預測當前角度;同時更新狀態誤差協方差矩陣 P(反映估計的不確定性)。
更新階段:用加速度計的角度作為觀測值修正預測值,得到最優角度;同時修正陀螺儀偏置(補償零漂),并更新協方差矩陣 P。
二、具體實現
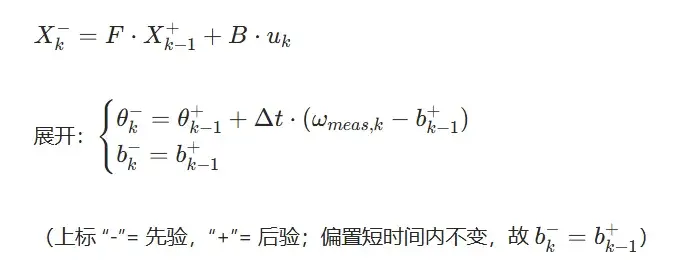
2.1預測階段(先驗估計)
狀態預測:用陀螺儀積分預測角度
對應代碼:
// 預測階段:更新角度預測
float rate = newRate - *kalmanBias; // 真實角速度 = 測量角速度 - 偏置
*kalmanAngle += dt * rate; //角度預測:θ_k = θ_{k-1}+ dt*(ω - b)
協方差預測:更新估計的不確定性
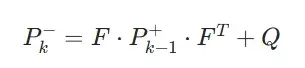
先計算:

再加上Q得到:
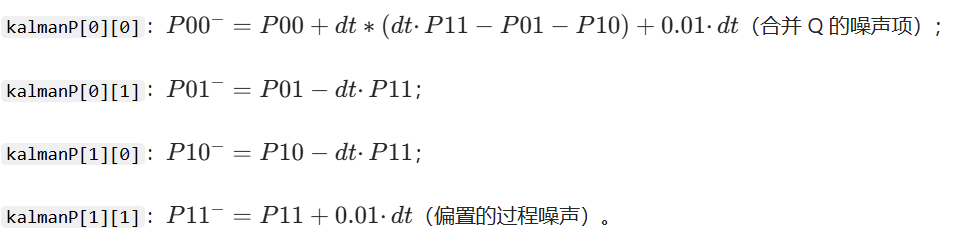
對應代碼:
kalmanP[0][0] += dt * (dt * kalmanP[1][1] - kalmanP[0][1] - kalmanP[1][0] + Q_ANGLE);
kalmanP[0][1] -= dt * kalmanP[1][1];
kalmanP[1][0] -= dt * kalmanP[1][1];
kalmanP[1][1] += Q_BIAS * dt;
2.2更新階段(后驗修正)
殘差(創新項):觀測值與預測值的偏差

卡爾曼增益:權衡 “預測” 和 “觀測” 的可信度

對應代碼:
// 計算卡爾曼增益K
float S = kalmanP[0][0] + R_MEASURE; // 角度方差+測量噪聲方差(R)
float K[2];
K[0] = kalmanP[0][0] / S;
K[1] = kalmanP[1][0] / S;
狀態更新:修正預測值,得到最優估計
對應代碼:
// 更新階段:利用加速度計測量值修正預測角度
float y = newAngle - *kalmanAngle; // 改用傳入的角度
*kalmanAngle += K[0] * y; // 修正角度
*kalmanBias += K[1] * y; // 修正偏置
協方差更新:修正估計的不確定性

對應代碼:
// 更新協方差矩陣P
float P00_temp = kalmanP[0][0];
float P01_temp = kalmanP[0][1];
kalmanP[0][0] -= K[0] * P00_temp;
kalmanP[0][1] -= K[0] * P01_temp;
kalmanP[1][0] -= K[1] * P00_temp;
kalmanP[1][1] -= K[1] * P01_temp;
一、為何用匿名上位機調試
匿名上位機是一款由國內開發者打造、面向嵌入式開發場景的開源 / 低成本 PC 端調試工具,相比普通串口助手只能顯示一串冰冷的歐拉角數字,匿名上位機可將 Roll/Pitch/Yaw 以實時曲線、數值儀表盤、3D 模型姿態仿真等形式呈現 —— 當我們晃動搭載 MPU6050 的 CW32L012 開發板時,上位機的 3D 模型會同步傾斜、轉向,曲線會實時跟蹤歐拉角數值變化,你能快速判斷卡爾曼融合后的姿態解算是否準確(如零漂是否被抑制、動態晃動時歐拉角是否無明顯跳變),無需逐行核對數字。
二、通信幀格式
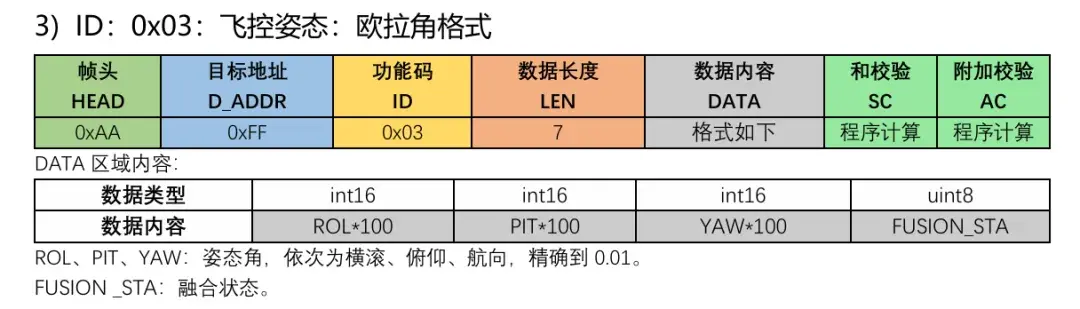
初始化L012串口,并根據通信格式編寫匿名上位機的通信驅動:
程序實際現象
【CW32L012解算MPU6050的姿態數據并進行卡爾曼濾波的方法-嗶哩嗶哩】
https://b23.tv/2GZqcIg
一、開發板現象:
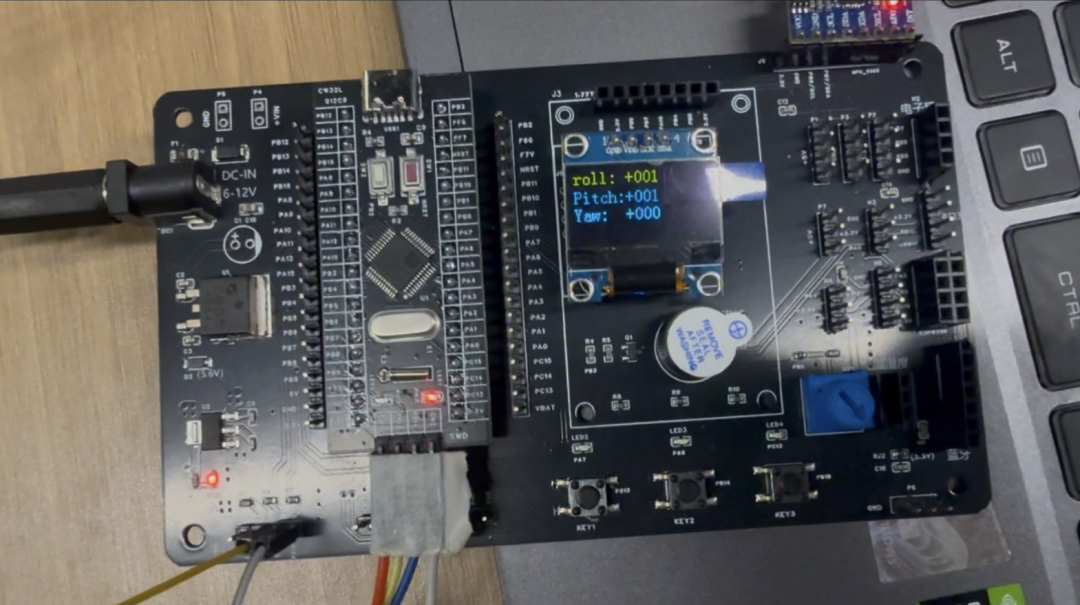
OLED屏幕實時顯示解算的三軸角度
二、匿名上位機現象
【CW32L012使用MPU6050介紹-嗶哩嗶哩】 https://b23.tv/fi7hCnw
-
加速度計
+關注
關注
6文章
813瀏覽量
48231 -
卡爾曼濾波
+關注
關注
3文章
167瀏覽量
25453 -
MPU6050
+關注
關注
39文章
313瀏覽量
76666
發布評論請先 登錄
MPU6050與卡爾曼濾波互補濾波的比較分析

使用51單片機實現MPU6050的卡爾曼濾波算法代碼免費下載
串口MPU6050卡爾曼濾波6軸9軸資料合集免費下載
畢業論文 | 基于MPU6050及卡爾曼濾波的平衡小車設計(源代碼與設計文檔)




 工商網監
工商網監
評論