 智能貓砂盆狀態監測紅外感應方案
智能貓砂盆狀態監測紅外感應方案

寵物智能貓砂盆狀態監測紅外感應方案
智能寵物產品市場貓砂盆可以說是養貓一族的剛需產品,對于貓砂盆的核心需求是自動化、智能化,下面我們來分析貓砂盆的智能化需求。
一、智能貓砂盆的場景化需求
貓砂盆是用來提供給貓進行排泄的場所,可以有效的保持衛生,而傳統簡單的貓砂盆雖然也可以實現上廁所的功能,但是依然需要人工手動去處理,如果有人長期在家處理還好,一旦較長時間不在家,貓砂盆的功能可能就失效了。這里貓砂盆的痛點就是需要人工及時的介入去清理。
自動化智能化的貓砂盆在傳統貓砂盆上增加自動清潔、健康監測等智能化功能,通過結構設計和自動化設計以及紅外傳感器來實現自動化清理貓砂,可以在很大程度上解放雙手。
而智能化貓砂盆實現智能的傳感方式很多采用的都是紅外感應方案,?智能貓砂盆的紅外工作原理?主要包括感應貓咪進入與離開、自動清理、除臭和健康監測等功能。智能貓砂盆通過內置的紅外傳感器或重量傳感器來檢測貓咪是否進入貓砂盆。紅外傳感器通過發射紅外光并接收反射回來的光線來檢測物體的存在。當貓咪進入貓砂盆時,紅外光會被貓咪的身體反射回來,傳感器接收到信號后,確認貓咪已經進入。當貓咪離開后,傳感器再次檢測到沒有反射信號,確認貓咪已經離開,然后啟動清理程序?。
寵物智能貓砂盆狀態監測紅外感應方案
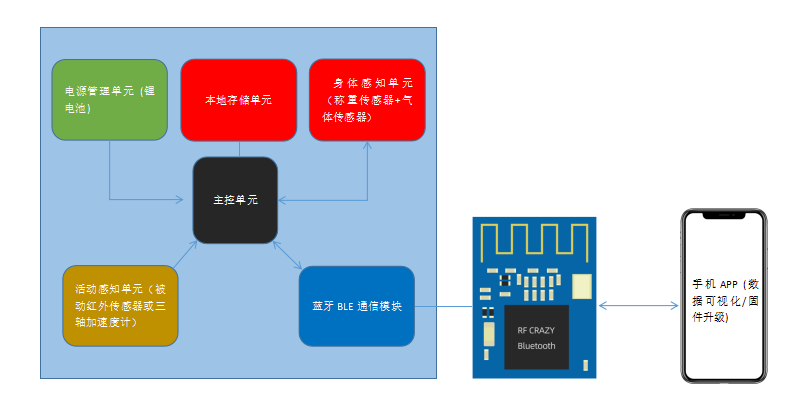
因為智能化貓砂盆是基于紅外傳感的方式來實現智能化的,所以接下來我們就以WT4001A紅外模塊來進行方案設計。
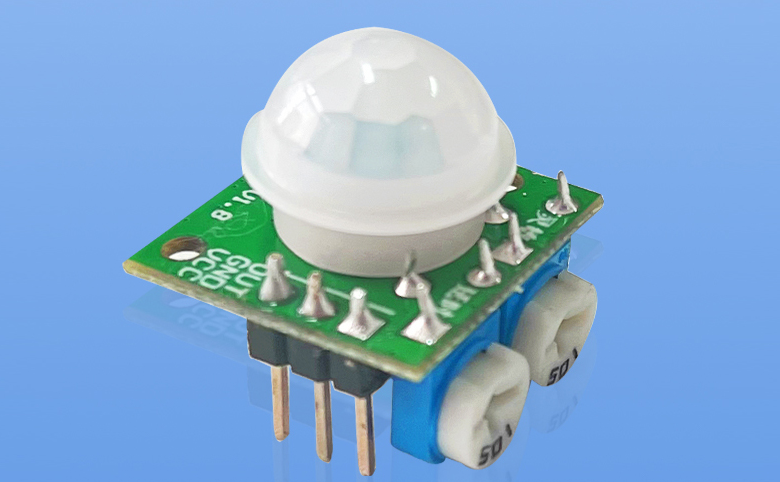
紅外模塊介紹
WT4001A紅外模體積小,物體檢測距離可達90cm,而且具很低的待機功耗,可達 16uA。最大工作電壓 5V,最低工作電壓 3.0V,增加了本產品不同的應用環境,滿足不同電源設計產品的需求。
模塊化設計,縮減產品開發時間,適用于智能家居電子產品,如智能門鎖、智能馬桶、自動烘干機近感檢測。
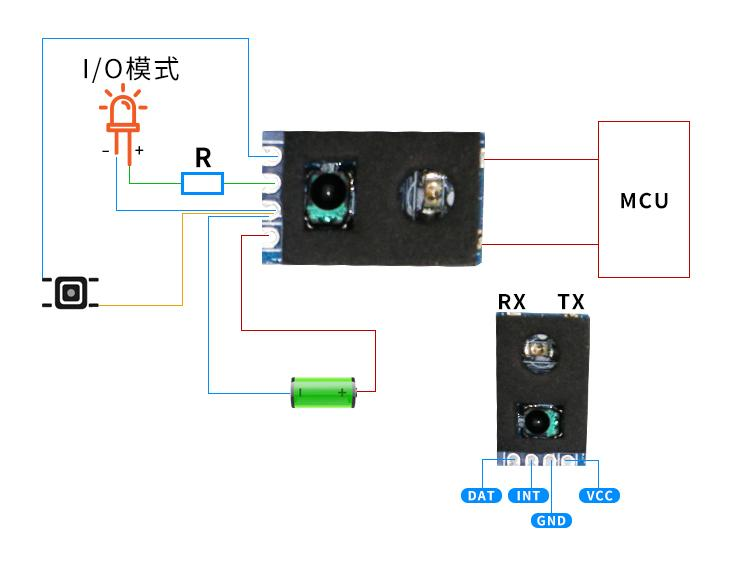
兼容 I/O 和 UART 兩種通訊方式,供用戶選擇,可快速調整各模塊的特性,達到快速、方便開發的優勢。
WT4001A模塊布置方案
采用“雙組紅外對管+前后布置”的方式,避免單組模塊因貓咪停留、雜物遮擋導致的誤判,具體布置如下:
1. 布置位置:在貓砂盆入口內側(靠近盆體內部)和外側(靠近盆體外部)各布置一組WT4001A紅外模塊,兩組模塊中心間距為15-20cm(適配貓咪身體寬度,確保貓咪進出時會依次遮擋兩組模塊)。
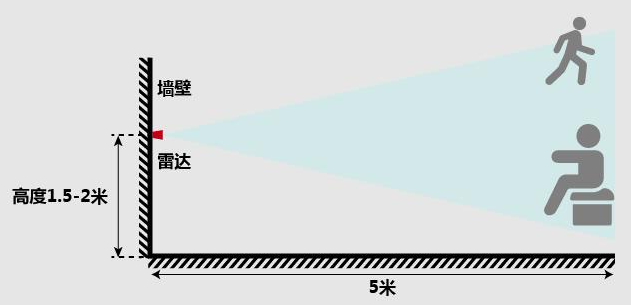
2. 安裝高度:距離地面10-15cm(適配常見貓咪的身高,避免貓咪低頭/抬頭時漏檢,同時防止貓砂飛濺遮擋紅外信號)。
3. 安裝方式:發射管與接收管相對安裝,分別固定在貓砂盆入口的兩側,確保紅外光線平行于地面,且無遮擋物(除貓咪進出時的遮擋外)。
定義:外側紅外對管為A組(發射管A1、接收管A2),內側紅外對管為B組(發射管B1、接收管B2)。
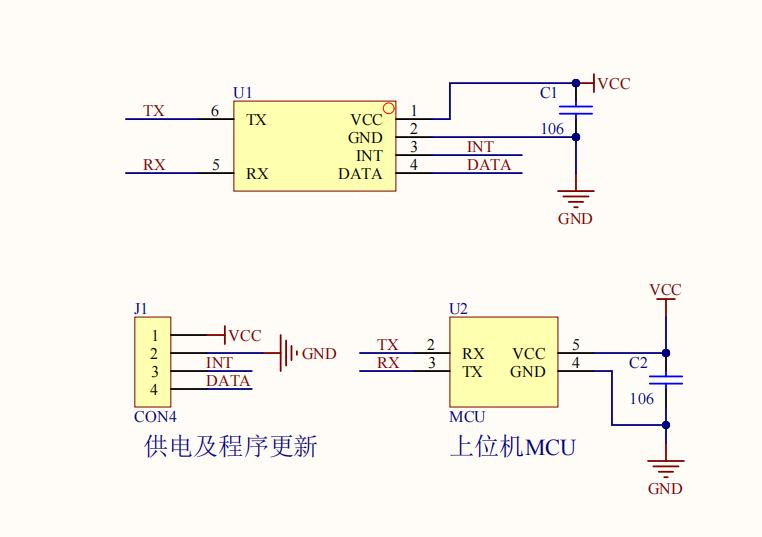
MCU核心判斷邏輯
過檢測A組、B組接收管的電平變化時序,區分“進入”和“離開”行為,核心邏輯如下:
- 初始狀態:A組、B組接收管均未被遮擋,輸出高電平(A=1,B=1)。
- 貓咪進入:貓咪先遮擋外側A組,再遮擋內側B組,電平變化時序為:(A=1,B=1) → (A=0,B=1) → (A=0,B=0);當檢測到B組變為低電平且A組已為低電平時,判定為“進入”,輸出進入狀態信號。
- 貓咪離開:貓咪先遮擋內側B組,再遮擋外側A組,電平變化時序為:(A=1,B=1) → (A=1,B=0) → (A=0,B=0);當檢測到A組變為低電平且B組已為低電平時,判定為“離開”,輸出離開狀態信號(。
- 防抖處理:由于貓咪進出時可能存在身體晃動,導致電平信號波動,需設置防抖延時(推薦20ms);連續檢測20ms內電平狀態不變,再確認當前狀態,避免誤判。
方案優勢
- 識別精準:雙組紅外模塊+時序判斷邏輯,有效避免單組模塊的誤判,適配不同體型貓咪。
- 抗干擾強:WT4001系列模塊對環境光、電磁干擾的抵抗能力強,適合貓砂盆的復雜使用環境。
- 成本可控:核心組件選型性價比高,電路設計簡單,便于批量生產或個人改裝。
- 擴展性好:可通過主控芯片新增功能(如使用次數統計、手機APP推送狀態、低電量提醒等)。
審核編輯 黃宇
-
傳感器
+關注
關注
2577文章
55311瀏覽量
793034 -
紅外感應
+關注
關注
5文章
99瀏覽量
26536
發布評論請先 登錄
家用智能垃圾桶控制板方案設計原理以及設計中需要注意的事項

2025人體紅外感應模塊選購指南與傳感器應用方案解析
寵物智能喂食器紅外感應方案

雷達模組精準感應,智能亮燈太省事啦
光感技術實現對貓咪行為的精準感知與自動化操作清潔的智能貓砂盆

30天免鏟屎防夾的智能貓砂盆方案
無需手持更靈活!納祥科技智能帽夾燈方案(紅外感應+手勢控制)
智能衛浴雷達模塊感應方案WT4101壽命長不怕干擾
全智芯433MHz無線傳輸人體感應門鈴方案概述
紅外感應迎賓器方案(方案介紹及產品功能)
應用于智能貓砂盆紅外線感測領域中的光距感傳感芯片 - WH4530A



 工商網監
工商網監
評論