 CW32L012“哈基汪”開發套件快速上手指南(附資料)
CW32L012“哈基汪”開發套件快速上手指南(附資料)

一、哈基汪介紹
CW32L012哈基汪是一款基于CW32L012C8T6的小型機器人控制板的智能小車。CW32L012C8是武漢芯源半導體有限公司的一款高性能、超低功耗的32位處理器,96M主頻,64K FLASH, 8K RAM,工作溫度范圍為-40度至85度。
CW32L012哈基汪功能豐富:
語音智能操控:可以通過說前進、后退、左轉、右轉、加速、減速、搖尾巴等與小車進行人機交互;
紅外遙控:可以通過小型紅外遙控器遠程遙控小車;
超聲波自動避障:運動中的小車會自動識別障礙物,進行避開,防止碰撞損傷小車;
小車和四足機器人形態自動切換,秒變搖尾巴哈基汪
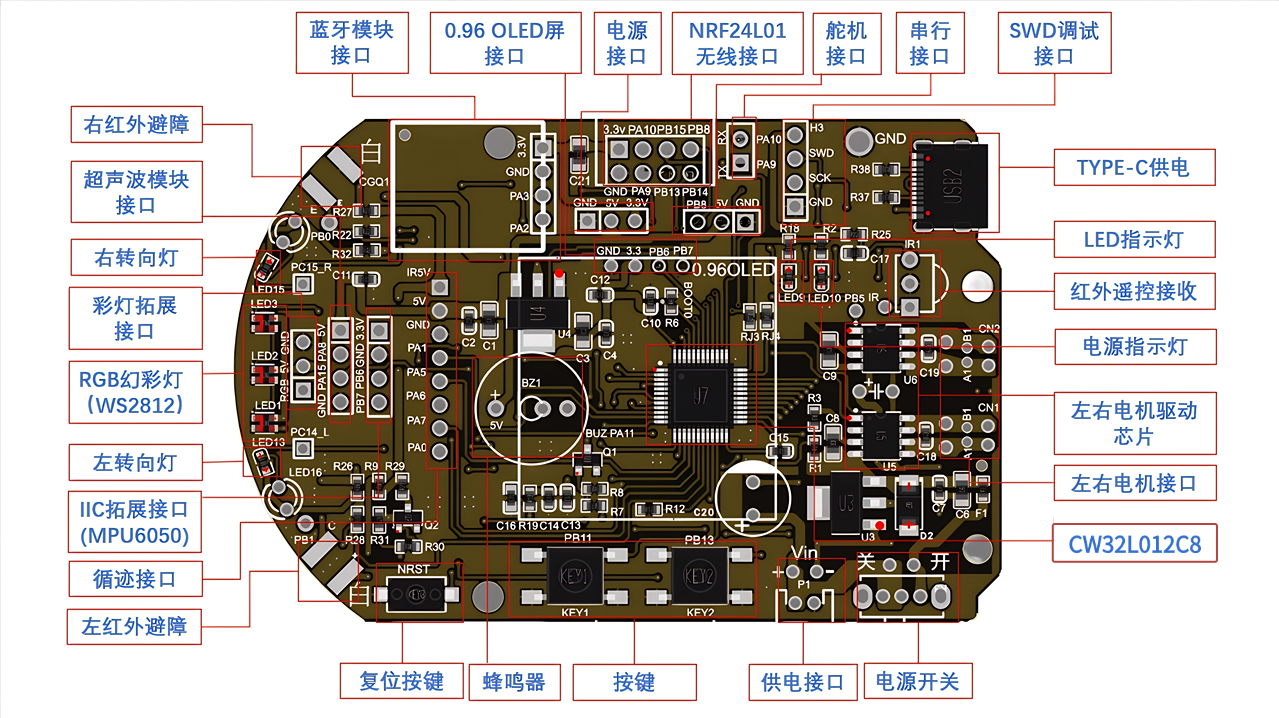
資源參考圖
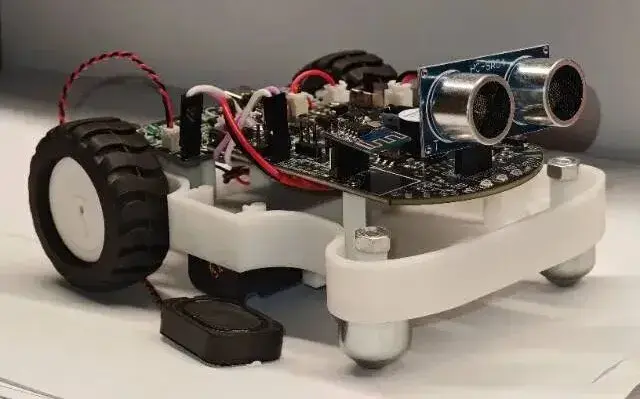
實物圖
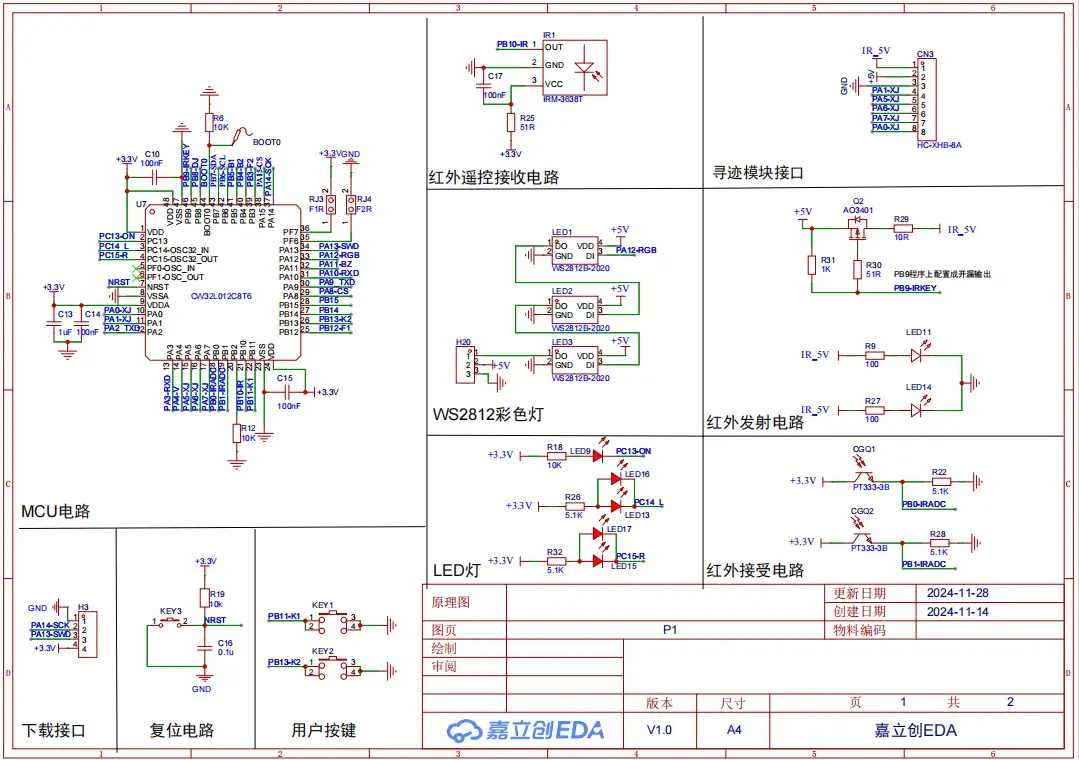
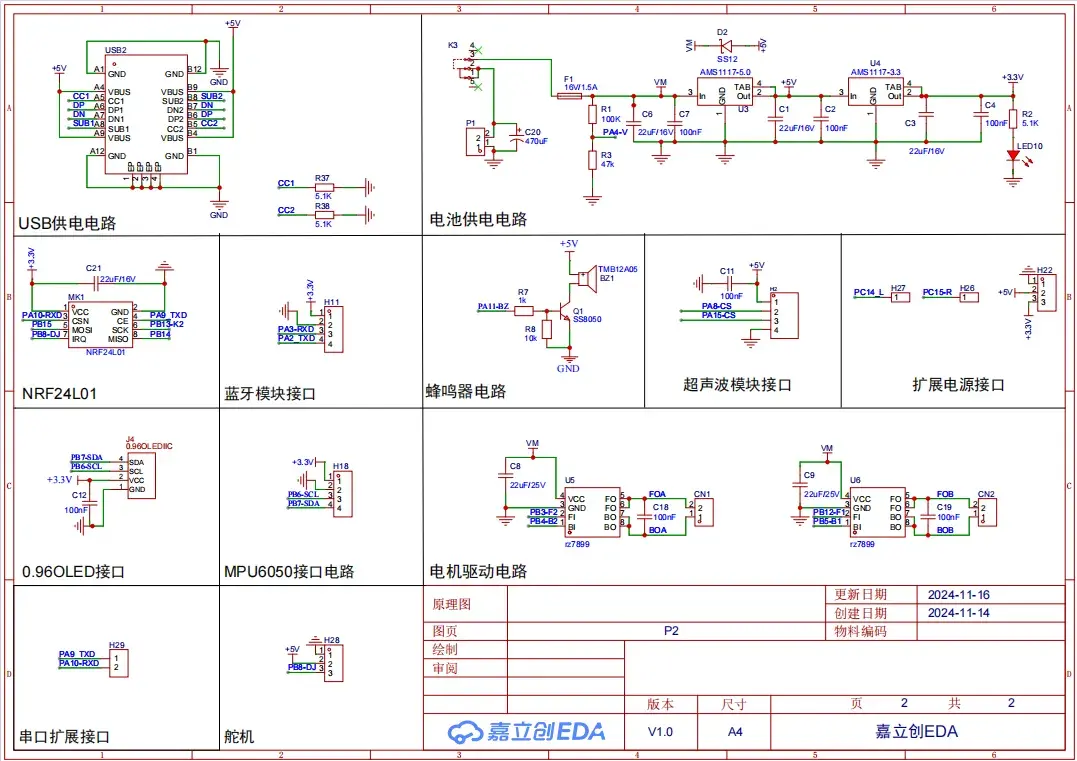
二、原理圖
三、資料鏈接
飛書資料鏈接:
https://dwi41yhz703.feishu.cn/wiki/B1Ihw31ebiX0vkkhQr2cINnkn1g?from=from_copylink

四、使用文檔
藍牙遙控功能手機APP藍牙調試器設置
按鈕:速度1~6對應小車的六檔速度,前進后退左右轉停車對應小車的狀態;
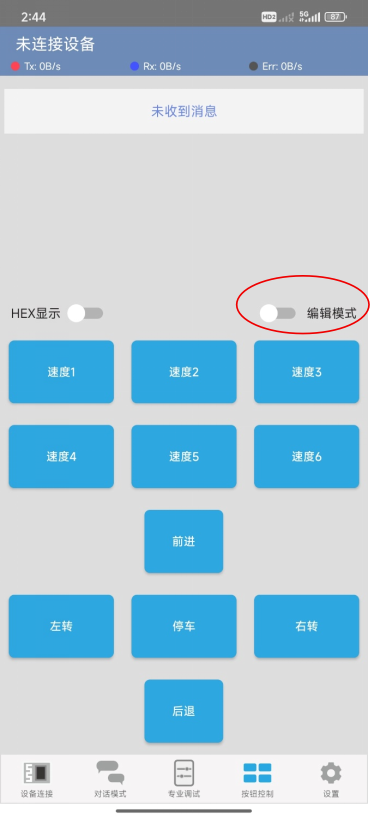
如圖,未勾選編輯模式,此時處于遙控狀態;若要編輯按鈕,請將此選項勾選上。
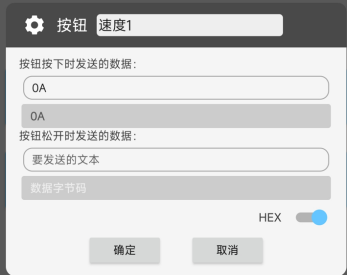
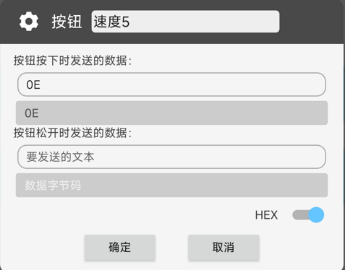
各按鈕配置如下(勾選編輯模式開始編輯按鈕,編輯按鈕時要勾選HEX):




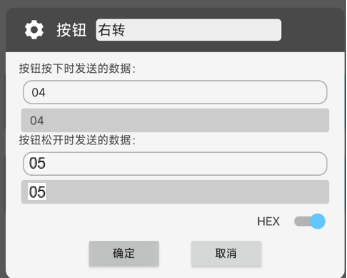

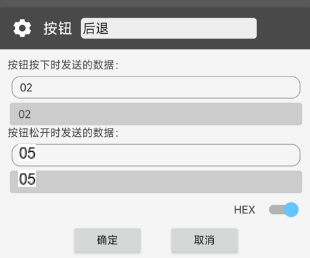
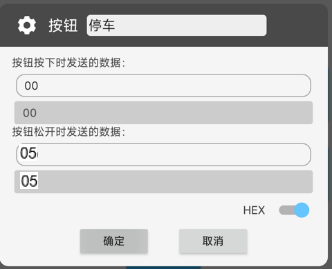
若要按下前進按鈕,小車前進,松手后自動停止,如上圖所示編輯即可。
若要按下前進按鈕,小車前進,松手后保持前進,請將“按鈕松開手發送數據:”這一欄的“05”刪除即可
(前進,后退,左轉,右轉四個按鈕同理)
連接藍牙步驟:
打開手機藍牙,給小車上電,進入藍牙調試器APP如下界面:
點擊“XLBLE”右邊的“+”進行連接

未連接界面
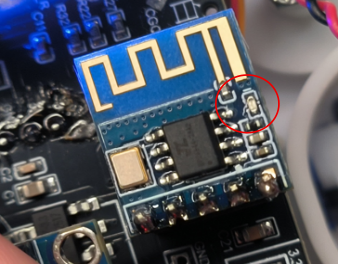
未連接時藍牙模塊狀態

成功連接界面
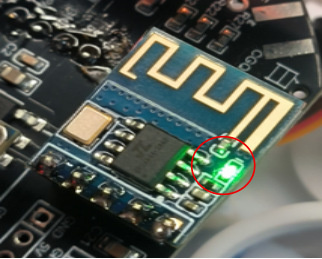
成功連接時藍牙模塊狀態
紅外遙控功能指令集
避障功能介紹和注意事項
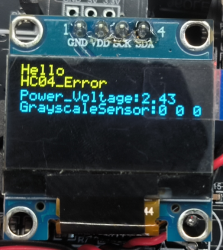
使用前請檢測超聲波是否正常工作:若OLED顯示HC04_Error(超聲波異常,接觸不良或是電壓不足或是超出最大測量距離) Distance(超聲波正常工作,顯示前方障礙物的的距離,單位cm)

超聲波異常圖 、

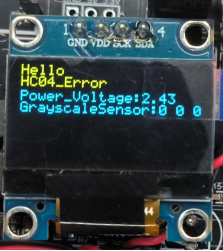
超聲波正常圖
功能介紹:小車在前進的狀態下,會檢測前方障礙物的距離,若小于10cm,小車會自動進行左/右轉(1s)進行避障,然后繼續前進。
語音模塊指令集和接線


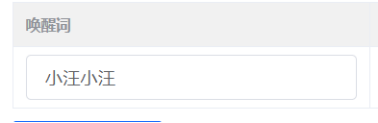
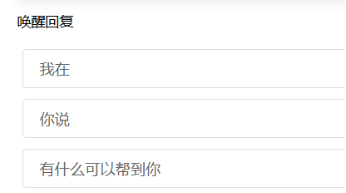
接線:
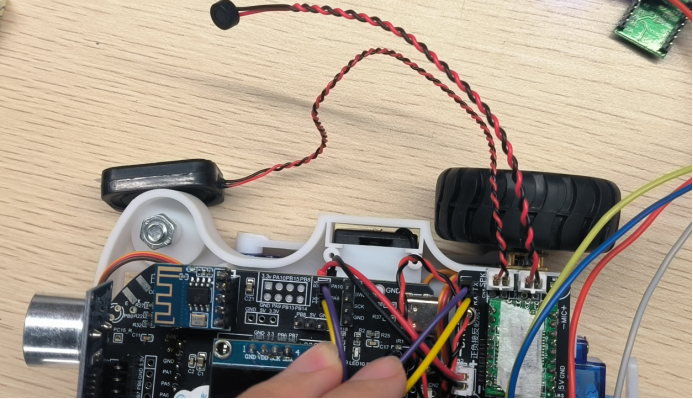
語音和主板的串口通信線(黃色和紫色):主板RX接語音擴展版TX,主板TX接語音擴展版RX
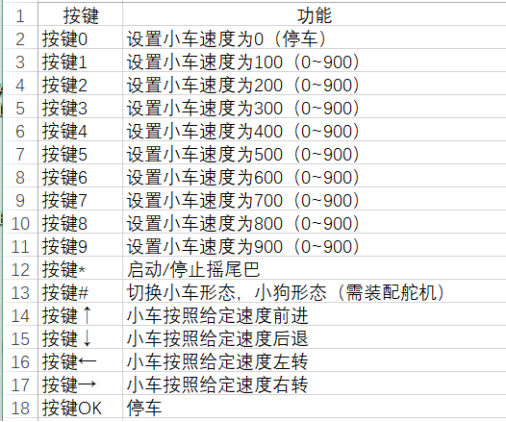
按鍵指令集
基礎版程序(工程名basic_car_cw32L012):KEY1按鍵按下小車停車,KEY2按鍵按下小車前進
升級版程序(工程名pro_car_cw32L012):KEY1按鍵按下小車前進/停止,KEY2按鍵按下小車變換形態(小車/四足)
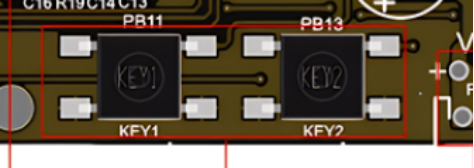
KEY1(左)KEY2(右)
OLED介紹
第二行:HC04_Error(超聲波異常,接觸不良或是電壓不足或是超出最大測量距離)
Distance(超聲波正常工作,顯示前方障礙物的的距離,單位cm)
第三行:電池電壓(單位V)
第四行(基礎版程序才有):顯示循跡當前狀態;對應灰度傳感器左中右(1表示壓線 0則未壓線)
超聲波異常圖
超聲波正常圖
循跡狀態圖
循跡功能(基礎版本上擴展)
使用說明:程序會在上電的時候記錄小車所在地圖的位置并記錄下地圖數據,后續灰度傳感器檢測到與上電時所處的地圖顏色差異過大時便會判定為掃到線,并執行循跡邏輯。
若在白色地圖上進行循黑線跑,則需要先在地圖的白色位置上電(或者按一下復位),然后便可操控小車進行運動,小車在前進的過程中若是檢測到線,便會自動執行循跡邏輯,若是未掃到線,則正常按照給出的指令進行運動。
靈敏度:若是地圖顏色變化過小或者地圖顏色原因導致循跡狀態一直不理想,可以更改main.c最上方的循跡閾值變量Threshold。

OLED會顯示循跡狀態,可以直觀看到灰度傳感器狀態:顯示循跡當前狀態對應左 中 右(1表示壓線 0則未壓線)
循跡狀態圖(第四行)
四足形態(基礎版本上擴展)
注意事項:下載好對應程序后上電后默認四個腳都處于收攏狀態(如下圖),請給小車通電并且舵機正常接線后再按照下圖所示給舵機安裝塑料卡尺(機器人的腳部分)
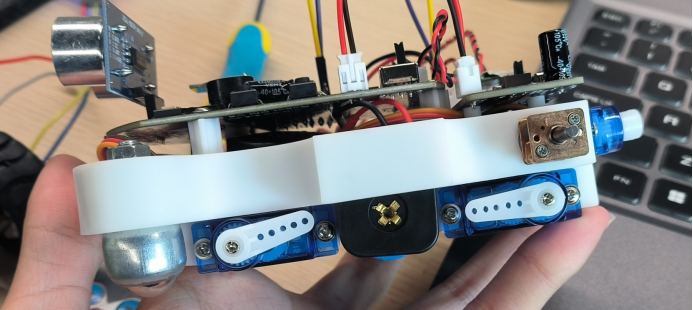
腳部初始上電狀態圖(另一側同理)
功能:在小車行進的途中可以隨時切換小車/四足狀態(紅外遙控#鍵或者按鍵KEY2),依舊可以通過藍牙、紅外、語音遙控,與小車狀態的功能一致
-
機器人
+關注
關注
213文章
31263瀏覽量
223158 -
智能小車
+關注
關注
87文章
565瀏覽量
83495 -
開發套件
+關注
關注
2文章
222瀏覽量
25187 -
CW32
+關注
關注
1文章
323瀏覽量
1926
發布評論請先 登錄
CW32L010 ESC Driver 電機控制套件快速上手指南
堅持繼續布局32位MCU,進一步完善產品陣容,96Mhz主頻CW32L012新品發布!
**CW32L012****開發評估板的第一個程序**
CW32L012小型機器人控制評估板活動 四足機器人+智能小車 開箱評測
ModelSim快速上手指南

使用芯源CW32的CW32L012開發評估板做了spi屏幕驅動

CW32L012與STM32F103的三角運算性能對比

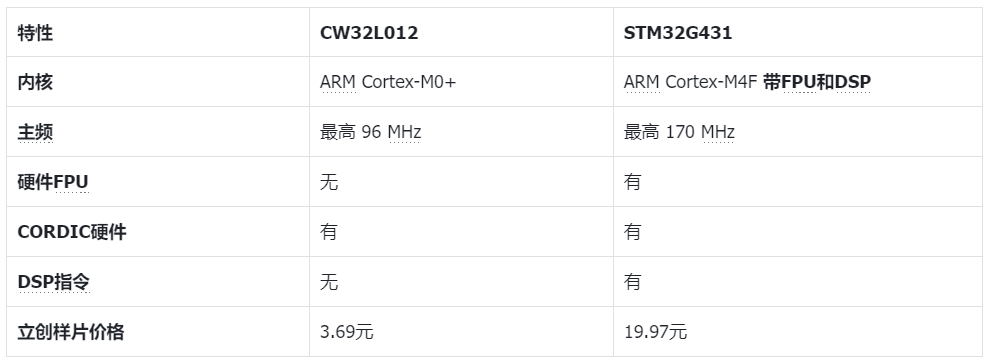
CW32L012與STM32G431的CORDIC三角函數運算性能對比



 工商網監
工商網監
評論