") 全固態(tài)激光雷達(dá)現(xiàn)在發(fā)展到什么階段了?
全固態(tài)激光雷達(dá)現(xiàn)在發(fā)展到什么階段了?

[首發(fā)于智駕最前沿微信公眾號(hào)]最近有一位小伙伴在評(píng)論區(qū)留言,讓我聊聊全固態(tài)激光雷達(dá)的發(fā)展。其實(shí)全固態(tài)激光雷達(dá)作為近幾年激光雷達(dá)技術(shù)演進(jìn)中的一個(gè)重要方向,確實(shí)被反復(fù)提起。很多時(shí)候我們看到的全固態(tài)激光雷達(dá)只是“體積更小”“成本更低”“更適合上車”這些結(jié)論式說法,卻很少有人耐心拆解它到底“固態(tài)”在什么地方,和我們熟悉的機(jī)械式、半固態(tài)激光雷達(dá)本質(zhì)差別在哪,現(xiàn)在發(fā)展到了哪一步,又到底解決了哪些問題、還沒解決哪些問題。今天就帶大家來聊聊這些內(nèi)容。

什么是激光雷達(dá)?
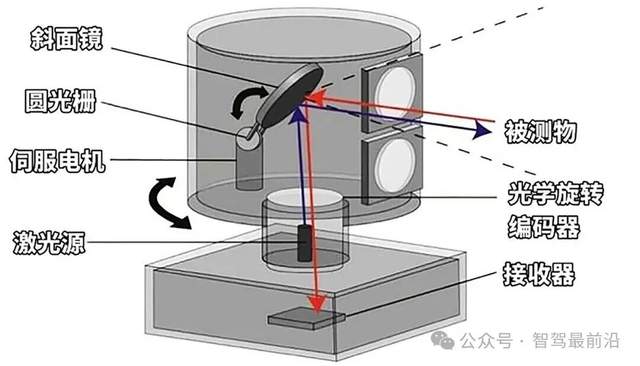
在聊全固態(tài)激光雷達(dá)之前,我們還是要先理解什么是激光雷達(dá)。激光雷達(dá),全稱是LiDAR(Light Detection and Ranging),中文顧名思義就是“光探測與測距”。它就是發(fā)出一束激光,等激光束遇到物體反射回來后,測量往返時(shí)間,再乘以光速就得到目標(biāo)物體的距離。
圖片源自:網(wǎng)絡(luò)
這種基本的測距方式叫飛行時(shí)間法(Time-of-Flight,ToF),是激光雷達(dá)工作的底層邏輯。通過高速發(fā)射大量激光脈沖,再把每次返回的距離和角度信息組合起來,就能構(gòu)建一個(gè)三維空間的點(diǎn)云圖,以展現(xiàn)周圍環(huán)境的形狀、位置和尺寸。
激光雷達(dá)的優(yōu)勢(shì)是可以生成三維感知,這種能力恰好是攝像頭和毫米波雷達(dá)難以同時(shí)兼顧的。攝像頭有顏色和紋理信息但難以準(zhǔn)確測距,毫米波雷達(dá)能測距和速度但分辨率有限,而激光雷達(dá)則能較高精度地獲得環(huán)境距離信息,這使得它在自動(dòng)駕駛、機(jī)器人、自主導(dǎo)航甚至地形測繪中不可或缺。
早期的激光雷達(dá)多采用機(jī)械旋轉(zhuǎn)掃描的方式,通過電機(jī)、轉(zhuǎn)臺(tái)等機(jī)械結(jié)構(gòu)讓激光束“掃過”整個(gè)周圍空間。這樣的設(shè)計(jì)能覆蓋360°的視角,并得到密集的點(diǎn)云數(shù)據(jù),但體積大、成本高且有機(jī)械磨損問題,不利于量產(chǎn)。正是在這種背景下,人們開始探索一種新的激光雷達(dá)方案,即半固態(tài)激光雷達(dá)。
所謂“半固態(tài)”,指的是它不像傳統(tǒng)機(jī)械式激光雷達(dá)那樣整個(gè)雷達(dá)都要機(jī)械旋轉(zhuǎn),而是把真正發(fā)射和接收光線的核心模塊固定住,只讓一些小的部件做機(jī)械運(yùn)動(dòng)。這樣的設(shè)計(jì)使得它的運(yùn)動(dòng)部件相比傳統(tǒng)機(jī)械雷達(dá)少得多,所以結(jié)構(gòu)更簡單、更穩(wěn)定。
現(xiàn)階段,又有技術(shù)方案提出,是否可以進(jìn)一步減少半固態(tài)激光雷達(dá)中的可動(dòng)機(jī)械部件,讓激光雷達(dá)直接全固態(tài)?

什么叫“全固態(tài)激光雷達(dá)”?
全固態(tài),顧名思義,就是沒有任何可動(dòng)的機(jī)械部件。在激光雷達(dá)里,這意味著不用轉(zhuǎn)動(dòng)電機(jī)、也不用微振鏡等傳統(tǒng)移動(dòng)元件來改變激光發(fā)射方向,而是通過電子手段或者特殊光學(xué)結(jié)構(gòu)來控制光束的發(fā)射與接收。這樣可以讓激光雷達(dá)更小、更可靠、更易大規(guī)模生產(chǎn)、成本更低。之所以不斷追求固態(tài)激光雷達(dá),是因?yàn)闄C(jī)械激光雷達(dá)存在如下問題。
機(jī)械件耐久性差,特別是在車用環(huán)境下,需要經(jīng)受溫度、震動(dòng)、灰塵等考驗(yàn)。
復(fù)雜的機(jī)械結(jié)構(gòu)造價(jià)高,量產(chǎn)難度大,不利于汽車等大規(guī)模行業(yè)裝配。
機(jī)械部分速度有限,無法做到像電子掃描那樣極高的刷新頻率。
全固態(tài)激光雷達(dá),要求激光束從發(fā)射到掃描再到接收全部靠電子和光學(xué)結(jié)構(gòu)實(shí)現(xiàn),而無需任何旋轉(zhuǎn)、擺動(dòng)等物理運(yùn)動(dòng)。這種方案不但小型化程度高,而且長期穩(wěn)定性和適應(yīng)性也顯著增強(qiáng)。

全固態(tài)激光雷達(dá)的技術(shù)路徑與原理
當(dāng)前全固態(tài)方案的實(shí)現(xiàn)路徑主要有兩種,即光學(xué)相控陣(Optical Phased Array,OPA)和Flash激光雷達(dá)(Flash LiDAR),每種方案的原理不同,適用場景也各有優(yōu)勢(shì)和限制。
1)光學(xué)相控陣(OPA):無需機(jī)械掃描的電子光束控制
在機(jī)械激光雷達(dá)或半固態(tài)激光雷達(dá)中,想讓激光束掃過空間必須靠旋轉(zhuǎn)或擺動(dòng)鏡面。OPA的設(shè)計(jì)理念就完全不同,它采用一組多個(gè)光發(fā)射元件組成“陣列”,通過精確調(diào)節(jié)每個(gè)發(fā)射單元發(fā)出的光波相位差來控制光束的方向。這種原理與雷達(dá)領(lǐng)域的相控陣?yán)走_(dá)類似,只不過在激光雷達(dá)里處理的是更高頻率的光波,而不是射頻波。
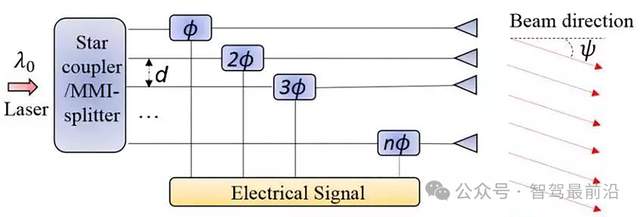
光控相控陣掃描基本原理示意圖,圖片源自:網(wǎng)絡(luò)
更通俗理解下這個(gè)方案,就是將一排排相干激光單元通過電信號(hào)協(xié)同工作,通過調(diào)整各個(gè)單元發(fā)出的光波疊加的相位關(guān)系,就可以形成一個(gè)指向性很強(qiáng)的光束,這一過程不需要任何機(jī)械動(dòng)作。只要改變控制信號(hào),就能讓這個(gè)光束指向不同方向,達(dá)到掃描的目的。
OPA方案由于沒有機(jī)械運(yùn)動(dòng)部件,可靠性高、壽命長;掃描速度由于僅受電子信號(hào)控制限制,因此可以非常快。此外,這一方案控制精度高,可以實(shí)現(xiàn)非常細(xì)致的點(diǎn)云分辨率。
但是在OPA的方案中,光波的波長極短(一般在1微米左右),要讓相控陣單元有效工作,它們的尺寸必須非常小,甚至要控制在波長的一半以內(nèi),這對(duì)制造工藝提出了極高的要求。因此想讓其規(guī)模化生產(chǎn)面臨一定的難度。
OPA在實(shí)現(xiàn)大視場(FieldofView)時(shí)還容易產(chǎn)生所謂的旁瓣問題,即除了主束以外會(huì)有能量泄露到其他方向,這會(huì)影響掃描質(zhì)量。如何同時(shí)提升視場和點(diǎn)云密度,是當(dāng)前技術(shù)攻關(guān)的重要方向之一。
2)Flash LiDAR:像照相機(jī)一樣
Flash LiDAR的工作方式更接近相機(jī)拍照。系統(tǒng)在一個(gè)極短的時(shí)間內(nèi)同時(shí)發(fā)出一束覆蓋整個(gè)視場的寬角激光脈沖,而不是把激光聚焦成一條細(xì)束再一行一行地掃過去。激光照射到場景中的物體后,反射光會(huì)從不同方向返回,接收端不再依賴單點(diǎn)探測器,而是使用一個(gè)二維探測器陣列,讓陣列中的每一個(gè)像素分別對(duì)應(yīng)視場中的一個(gè)方向。這樣一來,每個(gè)像素都能獨(dú)立記錄該方向上反射光的飛行時(shí)間和信號(hào)強(qiáng)度,從而直接得到一整幅深度圖。
正因?yàn)榘l(fā)射和接收都是“同時(shí)完成”的,F(xiàn)lash LiDAR和傳統(tǒng)機(jī)械掃描式激光雷達(dá)在工作邏輯上也有著本質(zhì)區(qū)別。機(jī)械掃描需要通過轉(zhuǎn)動(dòng)或擺動(dòng)光束,逐點(diǎn)、逐線地完成空間采樣,而Flash LiDAR則是在一次發(fā)射中完成整個(gè)視場的感知,沒有掃描過程,也不存在掃描順序的問題。
這種一次性成像的方式,使得它的結(jié)構(gòu)極其簡單,沒有任何掃描部件;因?yàn)橥瑫r(shí)完成整個(gè)視野的探測,所以它的刷新速度非常快;對(duì)于短距離應(yīng)用和高動(dòng)態(tài)場合,它能提供非常低延遲的感知數(shù)據(jù)。
因?yàn)镕lash LiDAR是在同一時(shí)間把激光鋪滿整個(gè)視場,激光能量不再集中在某一個(gè)方向,而是被均攤到所有角度上。在車規(guī)安全標(biāo)準(zhǔn)的限制下,單次發(fā)射的總能量不能無限提高,這就導(dǎo)致分配到每個(gè)方向的有效能量本身就不高,反射回來的信號(hào)自然也會(huì)變?nèi)酢=Y(jié)果就是,F(xiàn)lash LiDAR在遠(yuǎn)距離探測和精細(xì)分辨率上會(huì)受到限制。相比之下,傳統(tǒng)機(jī)械式激光雷達(dá),或者采用OPA的固態(tài)方案,可以把激光能量集中到某一個(gè)方向逐點(diǎn)掃描,在同樣的安全約束下,更容易把遠(yuǎn)處目標(biāo)“打亮”,因此在遠(yuǎn)距探測能力上更有優(yōu)勢(shì)。
為了彌補(bǔ)這種先天的能量分散問題,F(xiàn)lash LiDAR在接收端發(fā)展出了不同的技術(shù)實(shí)現(xiàn)路徑。其中一種思路是使用靈敏度極高的SPAD單光子雪崩二極管陣列,讓系統(tǒng)具備單光子級(jí)別的探測能力,即使返回信號(hào)非常微弱,也有機(jī)會(huì)被捕捉到,這對(duì)低信噪比環(huán)境下的感知很有幫助。
另一種思路則是基于CMOS傳感器陣列,結(jié)合飛行時(shí)間測距邏輯來獲取深度信息,這類方案在工藝成熟度和成本控制上更有優(yōu)勢(shì),但在極遠(yuǎn)距離和弱信號(hào)場景下,對(duì)系統(tǒng)設(shè)計(jì)和算法提出了更高要求。

全固態(tài)激光雷達(dá)的發(fā)展現(xiàn)狀
2025年,固態(tài)激光雷達(dá)已從早期概念驗(yàn)證和小批量試產(chǎn)階段逐步進(jìn)入更廣泛的工程應(yīng)用階段。很多傳感器廠商和汽車主機(jī)廠都已推出不同形式的固態(tài)激光雷達(dá)產(chǎn)品,部分產(chǎn)品已經(jīng)實(shí)現(xiàn)了量產(chǎn)并裝配在量產(chǎn)車型上。
圖片源自:網(wǎng)絡(luò)
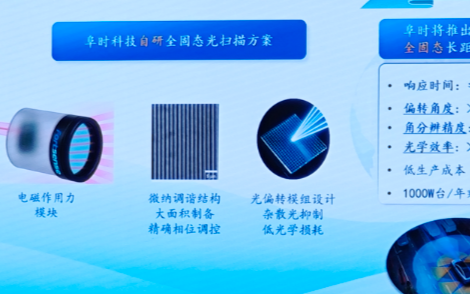
但是,目前市場上的激光雷達(dá)產(chǎn)品大多屬于混合固態(tài)或以MEMS微振鏡為代表的半固態(tài)方案,真正的OPA和Flash純固態(tài)方案在性能穩(wěn)定性、量產(chǎn)能力方面仍難以達(dá)到要求。盡管如此,行業(yè)對(duì)OPA的全固態(tài)激光雷達(dá)前景依然高度關(guān)注,因?yàn)樗碇磥碛型麑?shí)現(xiàn)的芯片級(jí)激光雷達(dá),這種形式的LiDAR如果成熟下來,將真正實(shí)現(xiàn)低成本、高可靠和大規(guī)模量產(chǎn)的目標(biāo)。

最后的話
全固態(tài)激光雷達(dá)是一種真正意義上把激光雷達(dá)系統(tǒng)從機(jī)械結(jié)構(gòu)中解放出來的新型傳感器。它無需可動(dòng)部件,通過電子控制和光學(xué)設(shè)計(jì)實(shí)現(xiàn)環(huán)境掃描,具有體積小、可靠性高、易量產(chǎn)的顯著優(yōu)勢(shì)。
目前,雖然目前全固態(tài)激光雷達(dá)尚未全面取代機(jī)械式產(chǎn)品,但它在量產(chǎn)應(yīng)用、成本下降和性能優(yōu)化方面優(yōu)勢(shì)明顯。未來隨著制造工藝成熟、集成度提升及算法優(yōu)化,全固態(tài)LiDAR或?qū)⒊蔀樽詣?dòng)駕駛等領(lǐng)域最核心的三維感知組件之一。
審核編輯 黃宇
-
激光雷達(dá)
+關(guān)注
關(guān)注
981文章
4516瀏覽量
196820
發(fā)布評(píng)論請(qǐng)先 登錄
固態(tài)激光雷達(dá)參數(shù)以及避障視頻
30dB超標(biāo)?固態(tài)激光雷達(dá)EMI整改全案解析

L4無人駕駛?cè)嫔?jí),主雷達(dá)+補(bǔ)盲雷達(dá)緣何成為行業(yè)標(biāo)配?

速騰聚創(chuàng)獲千線級(jí)激光雷達(dá)組合百度獨(dú)家定點(diǎn),Robotaxi行業(yè)全面擁抱千線級(jí)激光雷達(dá)

調(diào)頻連續(xù)波(FMCW)為什么是自動(dòng)駕駛激光雷達(dá)的未來?

如何解決激光雷達(dá)點(diǎn)云中“鬼影”和“膨脹”問題?

ToF 技術(shù)再進(jìn)化:面陣固態(tài)激光雷達(dá)在各環(huán)境中的可靠性

掃描、測距新方案亮相,固態(tài)激光雷達(dá)再進(jìn)一步

全固態(tài)激光雷達(dá)為什么遲遲未來?其技術(shù)難點(diǎn)是什么?
速騰聚創(chuàng)激光雷達(dá)全球銷量破百萬,市占率26%居首

SPAD席卷車載激光雷達(dá)市場
機(jī)械、半固態(tài)、全固態(tài)激光雷達(dá)有何區(qū)別?誰更適合自動(dòng)駕駛?

RoboSense與Mammotion庫犸達(dá)成戰(zhàn)略合作,120萬臺(tái)固態(tài)激光雷達(dá)刷新割草機(jī)器人




 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論