 PC強實時運動控制(一):C#的EtherCAT總線初始化(上)
PC強實時運動控制(一):C#的EtherCAT總線初始化(上)

今天,正運動小助手給大家分享一下強實時運動控制內核MotionRT750下PC上位機的EtherCAT總線初始化。
PC上位機EtherCAT總線的初始化方式主要分為兩種:純上位機初始化和下載BASIC腳本初始化。本文將詳細講解如何通過純上位機的方法來實現PC上位機EtherCAT總線初始化。
全國產強實時運動控制內核MotionRT750
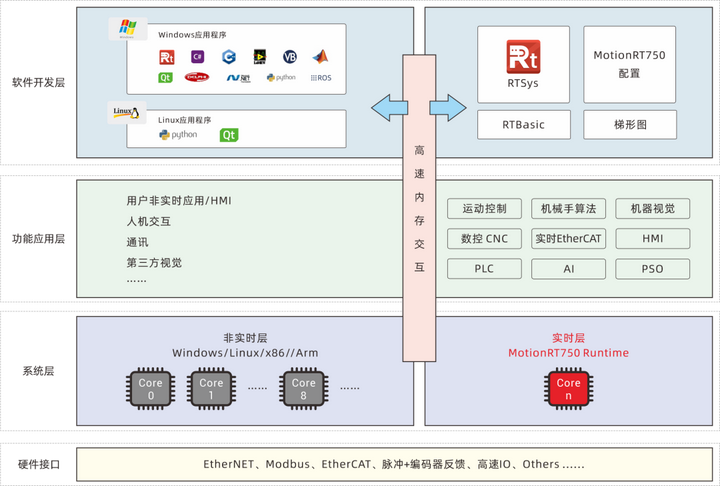
MotionRT750是正運動技術首家自主自研的
x86架構Windows系統或Linux系統下獨占確定CPU的強實時運動控制內核。
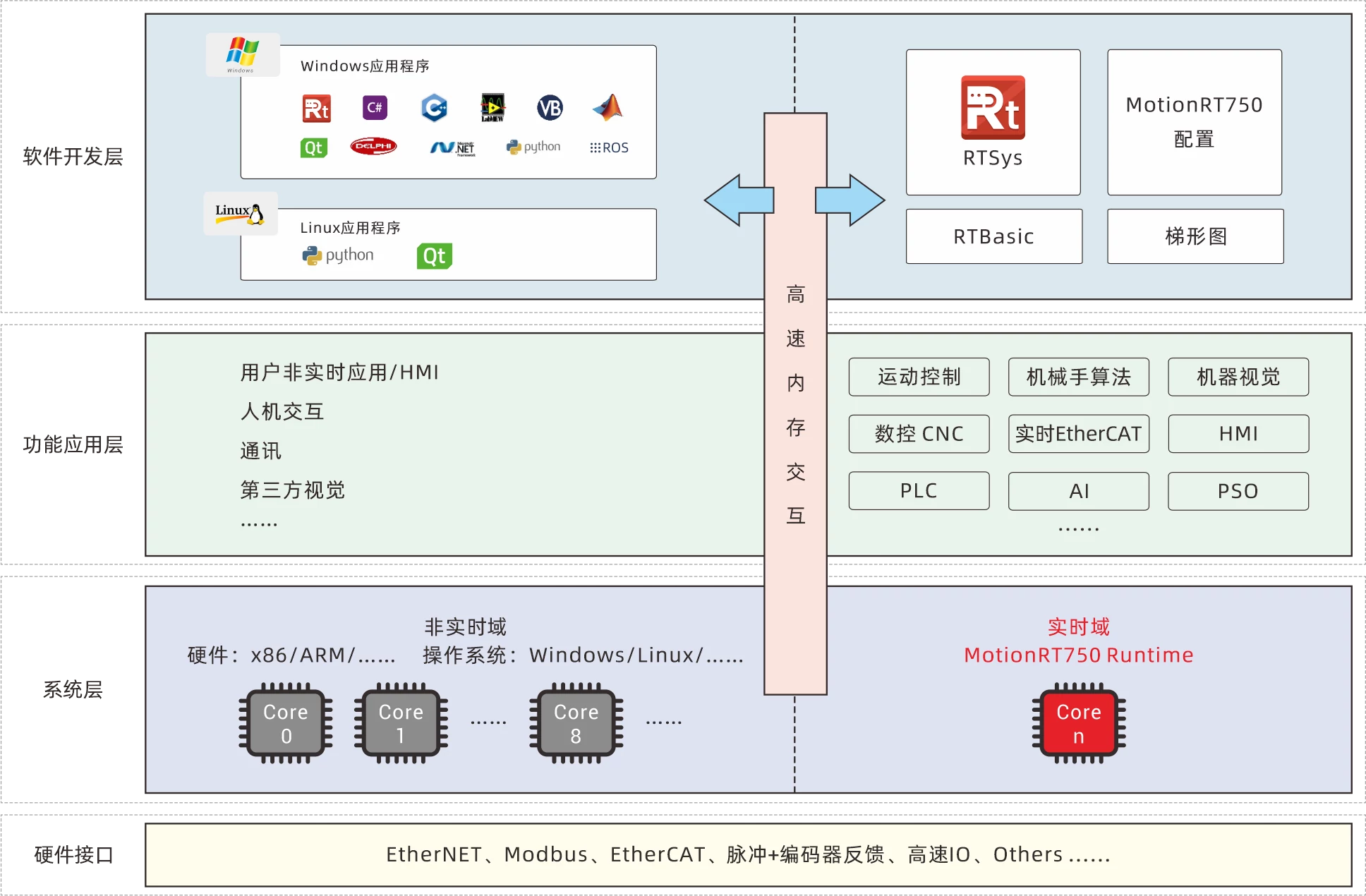
該方案采用獨占確定CPU內核技術實現超強性能的強實時運動控制。它將核心的運動控制、機器人算法、數控(CNC)及機器視覺等強實時的任務,集中運行在1-2個專用CPU核上。與此同時,其余CPU核則專注于處理Windows/Linux相關的非實時任務。
此外集成MotionRT750 Runtime實時層與操作系統非實時層,并利用高速共享內存進行數據交互,顯著提升了運動控制與上層應用間的通信效率及函數執行速度,最終實現更穩定、更高效的智能裝備控制,確保了運動控制任務的絕對實時性與系統穩定性,特別適用于半導體、電子裝備等高速高精的應用場合。

MotionRT750應用優勢:
1.跨平臺兼容性:支持Windows/Linux系統,適配不同等級CPU。
2.開發靈活性:提供多語言編程接口,便于二次開發與功能定制。
3.實時性提升:通過CPU內核獨占機制與高效LOCAL接口,實現2-3us指令交互周期,較傳統PCI/PCIe方案提速近20倍。
4.擴展能力強化:多卡多EtherCAT通道架構支持254軸運動控制及500usEtherCAT周期。
5.系統穩定性:32軸125us EtherCAT冗余架構消除單點故障風險,保障連續生產。
6.安全可靠性:不懼Windows系統崩潰影響,藍屏時仍可維持急停與安全停機功能有效,確保產線安全運行。
7.功能擴展性:實時內核支持C語言程序開發,方便功能拓展與實時代碼提升效率。
MotionRT750視頻介紹可點擊→正運動強實時運動控制內核MotionRT750。
更多關于MotionRT750的詳情介紹與使用點擊→強實時運動控制內核MotionRT750(一):驅動安裝、內核配置與使用。
01 C#語言進行PC上位機的EtherCAT總線初始化項目開發
1.在VS2019菜單“文件”→“新建”→“項目”,啟動創建項目向導。

2.選擇開發語言為“C#”和Windows窗體應用程序,點擊下一步。
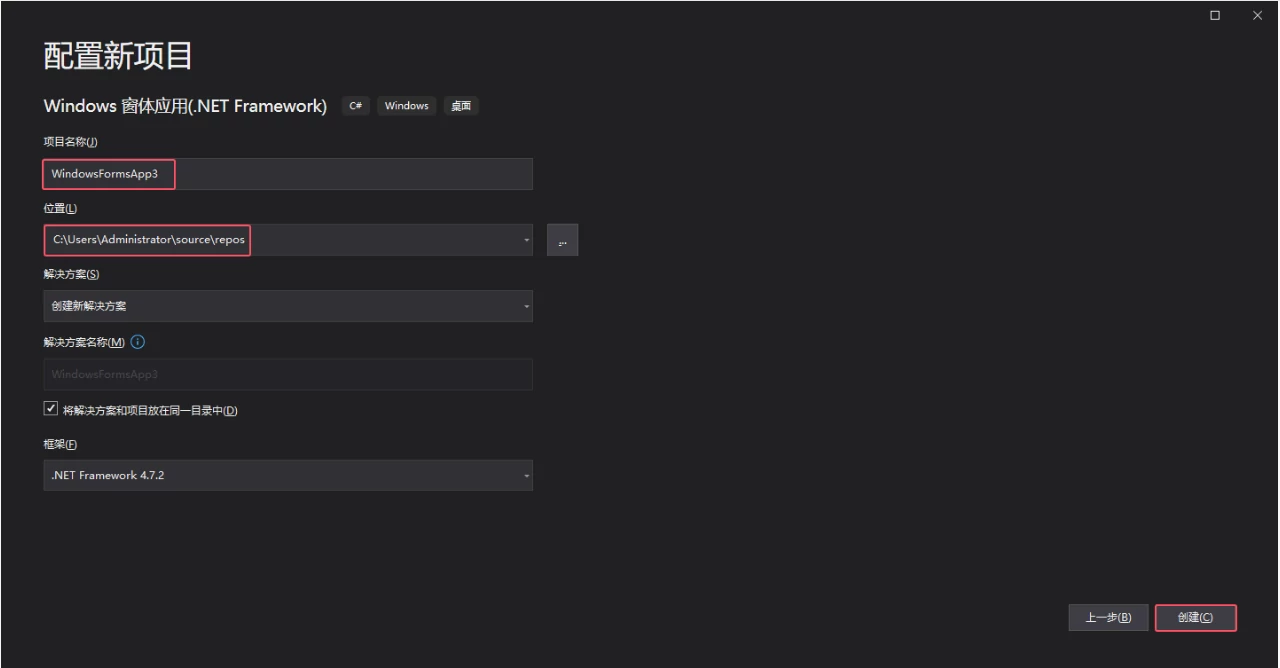
3.配置好項目名稱和位置,以及相應框架,點擊創建。

4.找到廠家提供的光盤資料里面的C#函數庫,路徑如下(64位庫為例)。
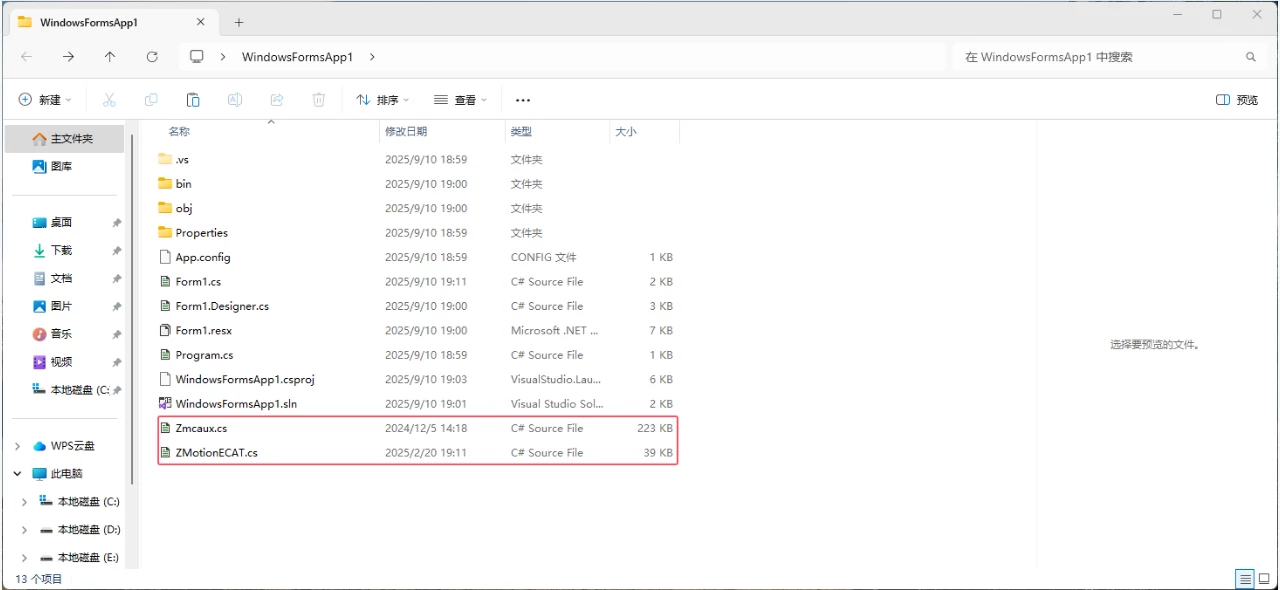
進入廠商提供的光盤資料,找到zauxdll.dll,zmotion.dll和Zmcaux.cs這三個庫文件。庫文件路徑:【00光盤資料】→【04PC函數】→【01PC函數庫V2.1】→【Windows平臺】→【C#】→【64位】→【庫文件】。

5.使用純上位機總線初始化時需要找廠商提供ZMotionECAT.cs文件。

6.將廠商提供的C#的庫文件以及相關文件復制到新建的項目中。
(1)將zmcaux.cs和ZMotionECAT.cs文件復制到新建的項目里面中。
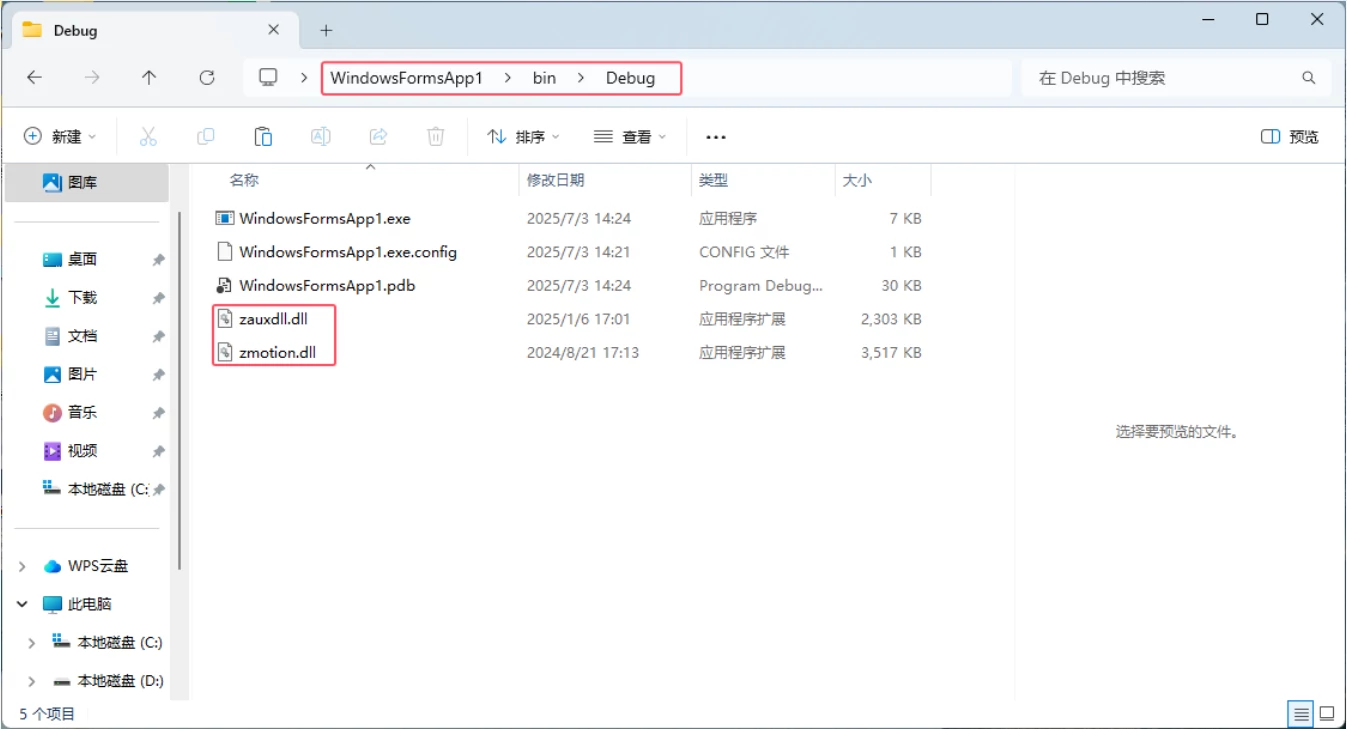
(2)將zauxdll.dll和zmotion.dll文件放入bindebug文件夾中。
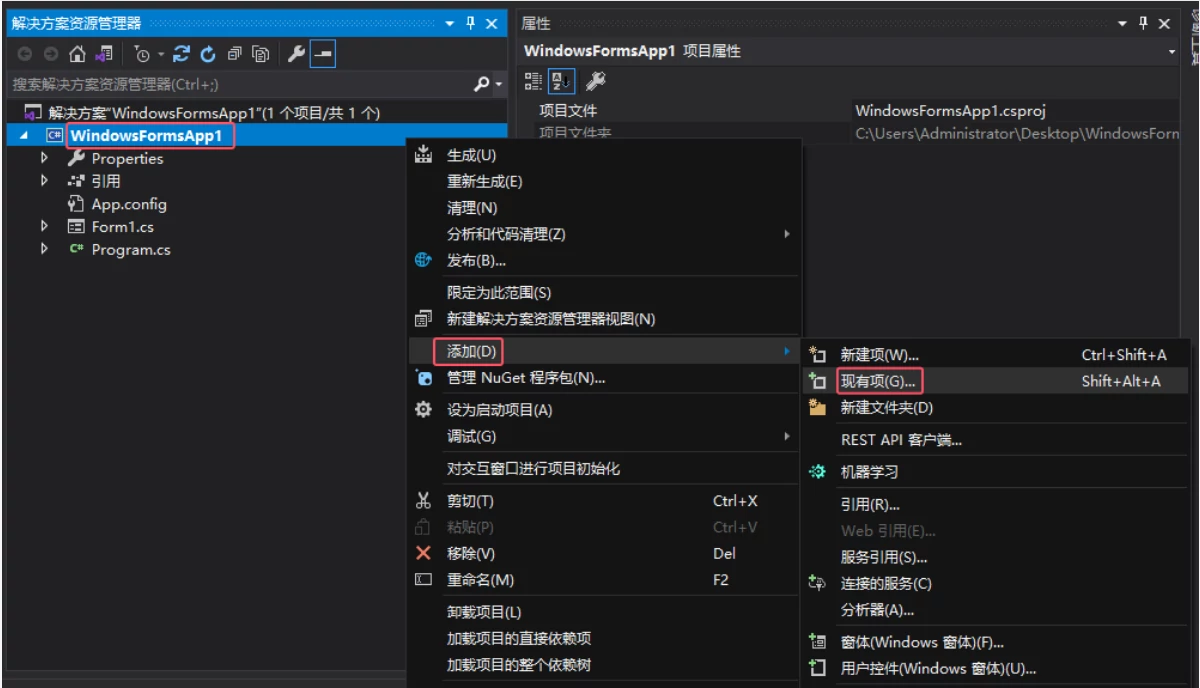
(3)將Zmcaux.cs和ZMotionECAT.cs文件添加進項目中。右鍵項目名稱,選擇添加,再選擇現有項,選擇Zmcaux.cs和ZMotionECAT.cs文件。
7.雙擊Form1.cs里面的Form1,出現代碼編輯界面,在文件開頭寫入using cszmcaux,并聲明控制器句柄g_handle。
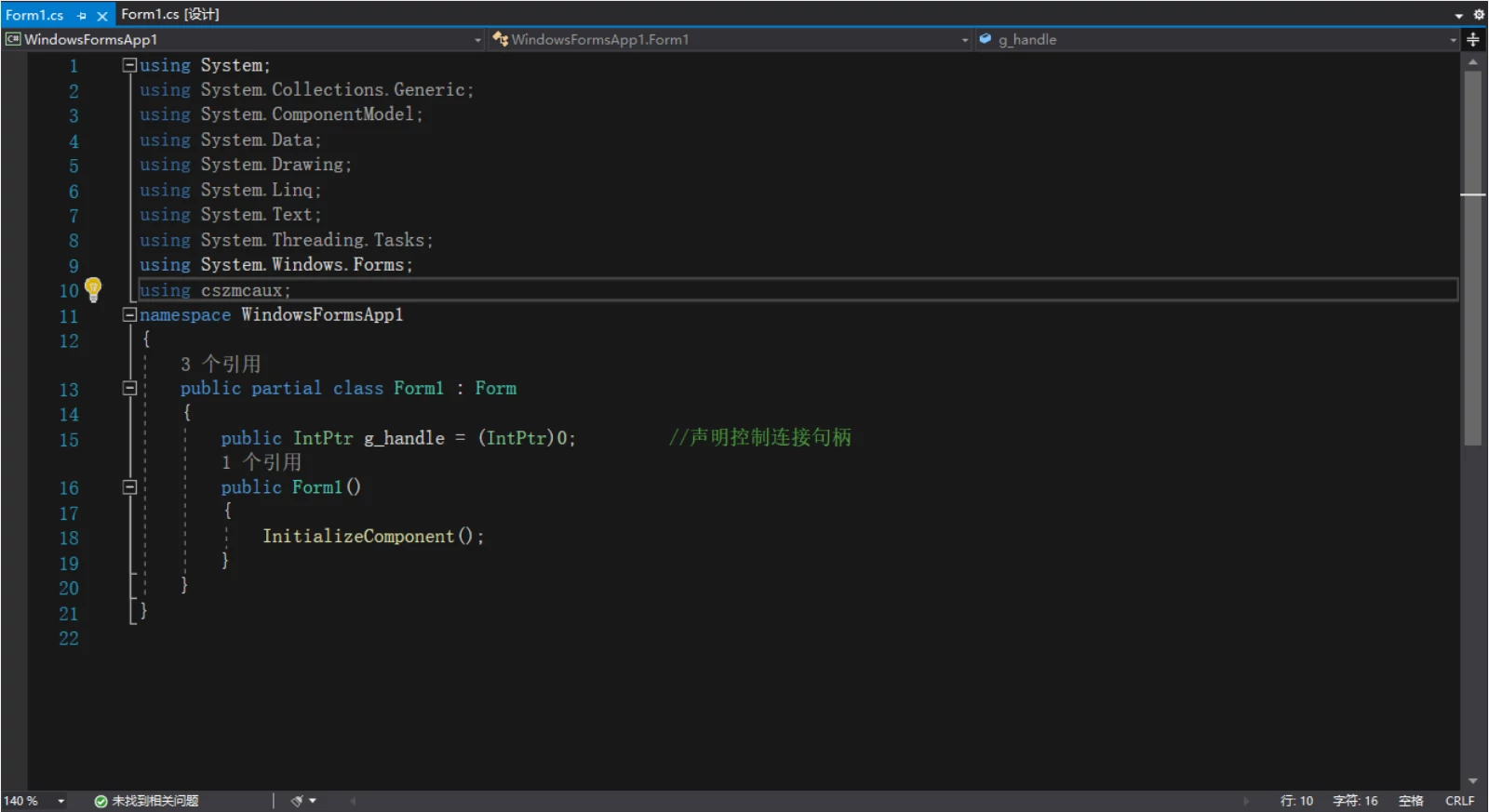
至此,項目新建完成,可進行C#項目開發。
02 相關PC函數介紹
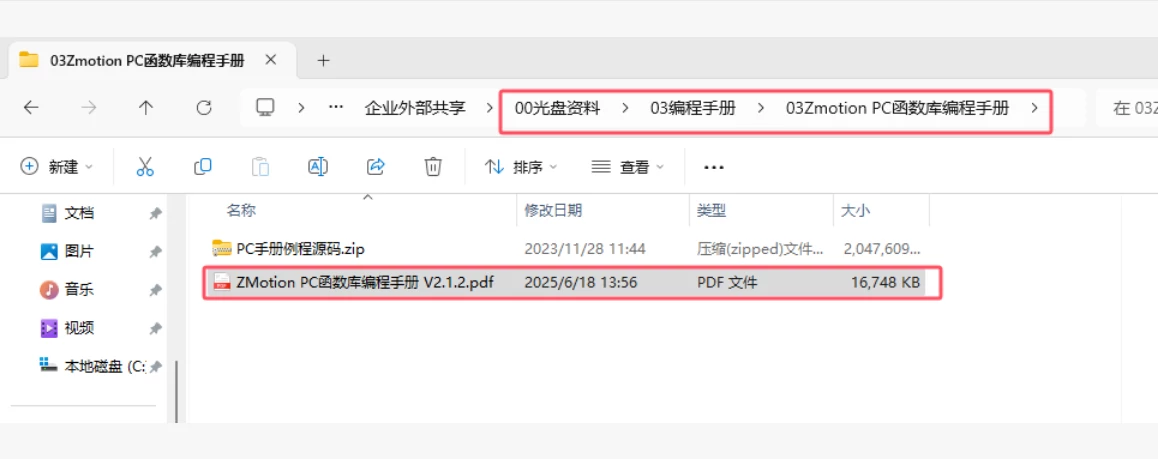
PC函數手冊可在光盤資料獲取,具體路徑如下:“00光盤資料3編程手冊3ZMotion PC函數庫編程手冊”。
1.上位機連接MotionRT750的接口。

2.控制器回零模式。

3.驅動器回零模式。

03 PC純上位機總線初始流程
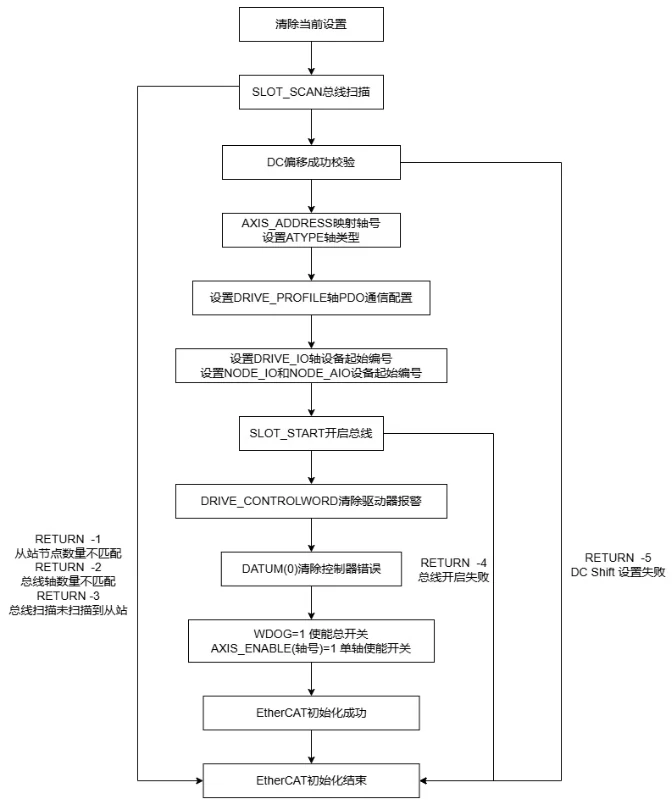
總線初始化代碼:
/// ///EtherCat 總線掃描與初始化 該接口會阻塞線程,阻塞時長為超時時間 //////句柄///槽位號,控制器的Ecat總線槽一般為0 ///總線初始化信息結構體,設置總線軸號分配情況,總線IO分配情況 ///超時時間 ///ActionlogCallback = null回調函數 獲取在線命令錯誤的返回字符串 ///返回值,小于 0 表示錯誤,參考枚舉 EcatInitErrCode,0 表示線程初始化成功,大于0:單個或多個zaux接口錯誤碼的累加值 publicstaticintZAux_BusCmd_EcatInit(IntPtr handle,intSlotId, EcatInitInfoSet EcatInfo,intApiOutTime, Action logCallback =null) { intIresult=0;//接口返回值,錯誤碼 intOutTime=ApiOutTime;//保存接口的超時時間 intEcatScanOutTime=ApiOutTime;//掃描超時時間 intIdleOutTime=100;//等待停止的超時時間 floatScanNodeNum=0;//掃描到的節點數量 StringBuilderReceBuff=newStringBuilder(256); byte[]cmdbuff=newbyte[2048]; intDrive_Vender,Drive_Device,Drive_Alias;//是否初始化Ecat初始化參數 if(EcatInfo.InitStructFlag==1) { //1.本地軸相關參數,用于指定本地軸的起始軸號和本地軸的數目 EcatInfo.LocalAxisId=0;//本地軸起始ID[默認0],若使用則從0開始 EcatInfo.LocalAxisNum=0;//本地軸使用的軸數量[默認0],若使用則從0開始 //2.驅動軸相關參數,用于指定總線驅動軸的起始軸號和總線軸的數目 EcatInfo.DriveAxisStart=0;//驅動軸起始ID[默認0],第1個驅動軸為DriveAxisStart,第2個為DriveAxisStart+1以此類推 EcatInfo.DriveAxisNum=-1;//驅動軸數量[默認-1],-1表示不指定驅動軸數量,若為0表示掃描到的軸數量,會檢查掃描到的軸數量是否一致 EcatInfo.DriveIoStara=256;//驅動IO映射到寄存器后的前一個IO起始地址 EcatInfo.DriveIoSpa=16;//一個驅動映射多少個IO端口數量 for(inti=0;i0) { Iresult+=zmcaux.ZAux_Direct_GetIfIdle(handle,i,refIdle); if(Idle==-1) { break; } MyDelayMs(10,refOutTime); IdleOutTime=IdleOutTime-10; } } //2、本地軸號重映射 for(inti=0;ii映射到LocalAxisId-->LocalAxisId+i Iresult+=zmcaux.ZAux_Direct_SetAtype(handle,EcatInfo.LocalAxisId+i,1); } //3、DC同步時鐘的設置 if(EcatInfo.SysClockMode==1) { Iresult+=zmcaux.ZAux_Execute(handle,"SYSTEM_ZSET=SET_BIT(7,SYSTEM_ZSET)",ReceBuff,256);//打開總線時鐘優化 } else { Iresult+=zmcaux.ZAux_Execute(handle,"SYSTEM_ZSET=CLEAR_BIT(7,SYSTEM_ZSET)",ReceBuff,256);//關閉總線時鐘優化 } if(0!=Iresult)//階段錯誤碼攔截! { returnIresult; } //用于保存SlotScan回調中的字符串 stringslotScanLog=null; stringfirstLine=null; //自定義回調:捕獲字符串,并可選地轉發給外部 ActioncaptureCallback=(msg)=> { slotScanLog=msg;//捕獲回調內容! logCallback?.Invoke(msg);//同時通知外部(保持原有行為) }; //4、如果前面的流程都正常,則進行第一次總線掃描,進行DC偏移時間的設置 for(intii=0;ii=0) { //判斷節點數目是否正確 if((int)ScanNodeNum!=EcatInfo.EcatNodeNum) { //節點數目不一致 return(int)EcatInitErrCode.WrongNodeNum; } } //【7、總線軸個數判斷,看看軸數是否可以對上】 intBusAxisNum=0;//總線軸個數 intNodeAxisNum=0;//當前節點軸個數 if(EcatInfo.DriveAxisNum>=0) { for(intj=0;j5)||(ZmlInfo!=NodeInfo)) { return(int)EcatInitErrCode.DcShiftSetFailu;//DC偏移設置失敗 } } //遍歷節點的各個電機 for(intj=0;j=EcatInfo.DriveIoStara) { Iresult+=zmcaux.ZAux_Direct_SetRevIn(handle,EcatInfo.DriveAxisStart+BusAxisNum,-1); Iresult+=zmcaux.ZAux_Direct_SetInvertIn(handle,TempVar,0); } //取消正限位的設置 Iresult+=zmcaux.ZAux_Direct_GetFwdIn(handle,EcatInfo.DriveAxisStart+BusAxisNum,refTempVar); if(TempVar>=EcatInfo.DriveIoStara) { Iresult+=zmcaux.ZAux_Direct_SetFwdIn(handle,EcatInfo.DriveAxisStart+BusAxisNum,-1); Iresult+=zmcaux.ZAux_Direct_SetInvertIn(handle,TempVar,0); } //取消設置原點 Iresult+=zmcaux.ZAux_Direct_GetDatumIn(handle,EcatInfo.DriveAxisStart+BusAxisNum,refTempVar); if(TempVar>=EcatInfo.DriveIoStara) { Iresult+=zmcaux.ZAux_Direct_SetDatumIn(handle,EcatInfo.DriveAxisStart+BusAxisNum,-1); Iresult+=zmcaux.ZAux_Direct_SetInvertIn(handle,TempVar,0); } } } //每軸單獨分組,軸報警只停自己 CmdBuff=string.Format("DISABLE_GROUP({0})",EcatInfo.DriveAxisStart+BusAxisNum); Iresult+=zmcaux.ZAux_Execute(handle,CmdBuff,ReceBuff,256); //總線軸計數+1 BusAxisNum=BusAxisNum+1; } /*************************************************************************************** -------------------------------2:IO模塊和AIO模塊的設置------------------------------ ***************************************************************************************/ //ECAT節點數字量IO起始地址的映射 if(EcatInfo.NodeIoId[i]>=32) { CmdBuff=string.Format("NODE_IO({0},{1})={2}",SlotId,i,EcatInfo.NodeIoId[i]); Iresult+=zmcaux.ZAux_Execute(handle,CmdBuff,ReceBuff,256); } //ECAT節點模擬量IO起始地址的映射 if(EcatInfo.NodeAIoId[i]>0) { CmdBuff=string.Format("NODE_AIO({0},{1})={2}",SlotId,i,EcatInfo.NodeAIoId[i]); Iresult+=zmcaux.ZAux_Execute(handle,CmdBuff,ReceBuff,256); } /*************************************************************************************** --------------------------------3:特殊模塊的設置---------------------------------- ***************************************************************************************/ //正運動EIO24088脈沖擴展軸和EIO16084脈沖擴展軸軸類型的設置與脈沖模式的設置 if((Drive_Device==0x1AB0)&&(Drive_Vender==0x41B)) {for(intk=0;k=(EcatInfo.DriveAxisStart);Drivei--) { zmcaux.ZAux_Direct_SetAxisEnable(handle,Drivei,1);//總線軸通過這個指令上使能 MyDelayMs(10,refOutTime); } } returnIresult; } else { //獲取在線命令返回字符串傳給主窗口 firstLine=string.IsNullOrEmpty(slotScanLog) ?string.Empty :slotScanLog.Split(new[]{'r','n'},StringSplitOptions.RemoveEmptyEntries).FirstOrDefault(); if(!string.IsNullOrEmpty(firstLine)) { ZMotionECAT.Instance.DoWork(firstLine); } return(int)EcatInitErrCode.EcatStartFailu;//總線開啟失敗 } } //獲取在線命令返回字符串傳給主窗口 firstLine=string.IsNullOrEmpty(slotScanLog) ?string.Empty :slotScanLog.Split(new[]{'r','n'},StringSplitOptions.RemoveEmptyEntries).FirstOrDefault(); if(!string.IsNullOrEmpty(firstLine)) { ZMotionECAT.Instance.DoWork(firstLine); } } return(int)EcatInitErrCode.NotScanNode; } //////停止槽位號是SlotId的總線通訊 //////句柄///返回值zaux接口錯誤碼publicstaticintZAux_BusCmd_SlotStop(IntPtrhandle,intSlotId) { stringCmdBuff=string.Format("SLOT_STOP({0})",SlotId); StringBuilderReceBuff=newStringBuilder(256); returnzmcaux.ZAux_Execute(handle,CmdBuff,ReceBuff,256); } //////掃描控制器對應槽的總線設備 //////句柄///返回值zaux接口錯誤碼///ActionlogCallback=null回調函數獲取在線命令錯誤的返回字符串 publicstaticintZAux_BusCmd_SlotScan(IntPtrhandle,intSlotId,refintOutTime,ActionlogCallback=null) { intScanOkFlag=0; intIresult=0; intEcatScanOutTime; UInt32puiread=0; uint8pbifExcuteDown=0; byte[]ZmcReceBuff=newbyte[256]; EcatScanOutTime=OutTime; //總線掃描指令的拼接 stringCmdBuff=string.Format("SLOT_SCAN({0})?RETURN",SlotId); //定義接受緩沖器并清空 StringBuilderReceBuff=newStringBuilder(1024); ReceBuff.Remove(0,ReceBuff.Length); //開始掃描總線設備情況 Iresult+=zmcaux.ZAux_Execute(handle,CmdBuff,ReceBuff,1024); //通過回調通知外部 stringresult=ReceBuff.ToString().Replace("-1n",""); logCallback?.Invoke(result); //延時等待掃描結果 if(ReceBuff.ToString()=="-1n") { EcatScanOutTime=0; ScanOkFlag=1; returnScanOkFlag; //Console.WriteLine("直接獲取-1,條件成功"); }elseif(ReceBuff.Length>0)//如果有其他的返回值則報未掃描到設備 { ScanOkFlag=0; //Console.WriteLine("直接獲取-1,條件失敗"); returnScanOkFlag; } else { MyDelayMs(500,refOutTime); EcatScanOutTime=EcatScanOutTime-500; } while(EcatScanOutTime>0) { Array.Clear(ZmcReceBuff,0,ZmcReceBuff.Length); //讀取在線命令的應答,對沒有接收應答的命令有用 Iresult+=zmcaux.ZMC_ExecuteGetReceive(handle,ZmcReceBuff,1000,refpuiread,refpbifExcuteDown); if(ZmcReceBuff[0]!=0) { //返回負一表示有成功掃描到設備 if((ZmcReceBuff[0]==45)&&(ZmcReceBuff[1]==49)&&(ZmcReceBuff[2]==10)) { ScanOkFlag=1; //Console.WriteLine("while獲取-1,條件成功"); break; } else { ScanOkFlag=0; //Console.WriteLine("while獲取-1,條件NG"); break; } } MyDelayMs(50,refOutTime); EcatScanOutTime=EcatScanOutTime-50; } returnScanOkFlag;} /////打開總線 //////句柄///返回值zaux接口錯誤碼///ActionlogCallback=null回調函數獲取在線命令錯誤的返回字符串 publicstaticintZAux_BusCmd_SlotStart(IntPtrhandle,intSlotId,refintOutTime,ActionlogCallback=null) { intStartOkFlag=0; intIresult=0; intEcatScanOutTime; StringBuilderReceBuff=newStringBuilder(1024); UInt32puiread=0; uint8pbifExcuteDown=0; byte[]ZmcReceBuff=newbyte[256]; EcatScanOutTime=OutTime; MyDelayMs(100,refOutTime); stringCmdBuff=string.Format("SLOT_START({0},4)",SlotId); Iresult+=zmcaux.ZAux_Execute(handle,CmdBuff,ReceBuff,256); //通過回調通知外部 stringresult=ReceBuff.ToString().Replace("-1n",""); logCallback?.Invoke(result); MyDelayMs(1000,refOutTime); CmdBuff=string.Format("SLOT_START({0},8)?Return",SlotId); Iresult+=zmcaux.ZAux_Execute(handle,CmdBuff,ReceBuff,256); //延時等待掃描結果if(ReceBuff.ToString()=="-1n") { EcatScanOutTime=0; StartOkFlag=1; returnStartOkFlag; //Console.WriteLine("直接獲取-1,條件成功"); } elseif(ReceBuff.Length>0)//如果有其他的返回值則報未掃描到設備 { StartOkFlag=0; //Console.WriteLine("直接獲取-1,條件失敗"); returnStartOkFlag; } else { MyDelayMs(500,refOutTime); EcatScanOutTime=EcatScanOutTime-500; } while(EcatScanOutTime>0) { Array.Clear(ZmcReceBuff,0,ZmcReceBuff.Length); //讀取在線命令的應答,對沒有接收應答的命令有用 Iresult+=zmcaux.ZMC_ExecuteGetReceive(handle,ZmcReceBuff,1000,refpuiread,refpbifExcuteDown); if(ZmcReceBuff[0]!=0) { //返回負一表示有成功掃描到設備 if((ZmcReceBuff[0]==45)&&(ZmcReceBuff[1]==49)&&(ZmcReceBuff[2]==10)) { StartOkFlag=1; //Console.WriteLine("while獲取-1,條件成功"); break; } else { StartOkFlag=0; //Console.WriteLine("while獲取-1,條件NG"); break; } } MyDelayMs(50,refOutTime); EcatScanOutTime=EcatScanOutTime-50; } returnStartOkFlag; }
04 C#總線初始化功能展示例程介紹
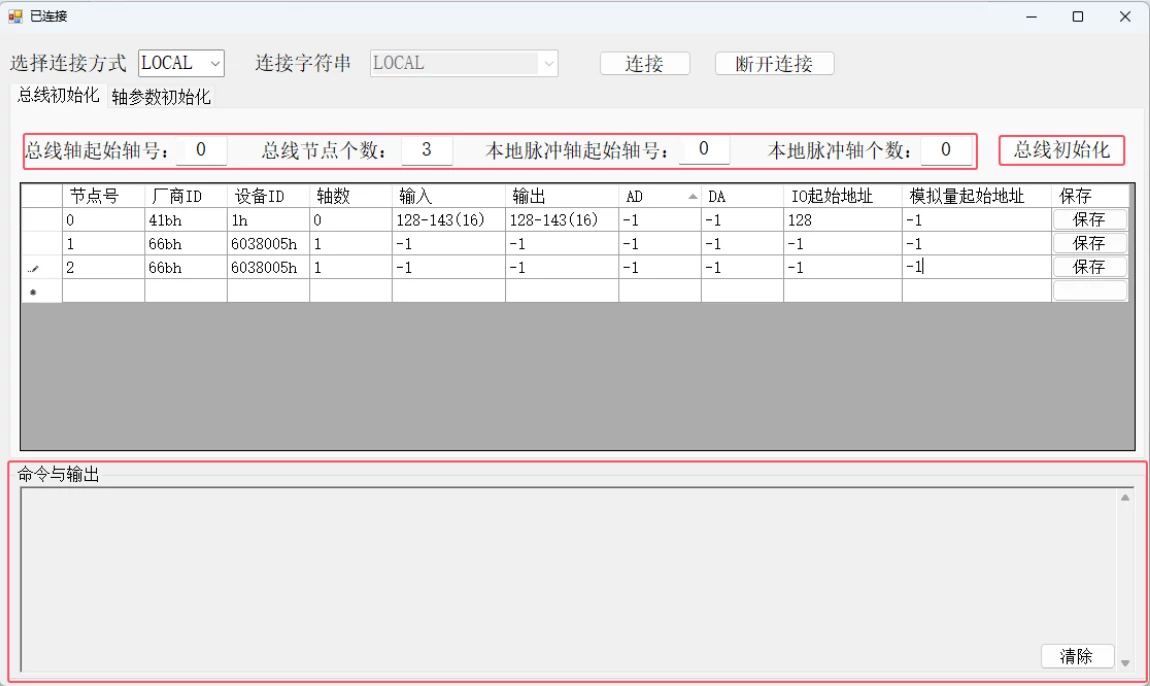
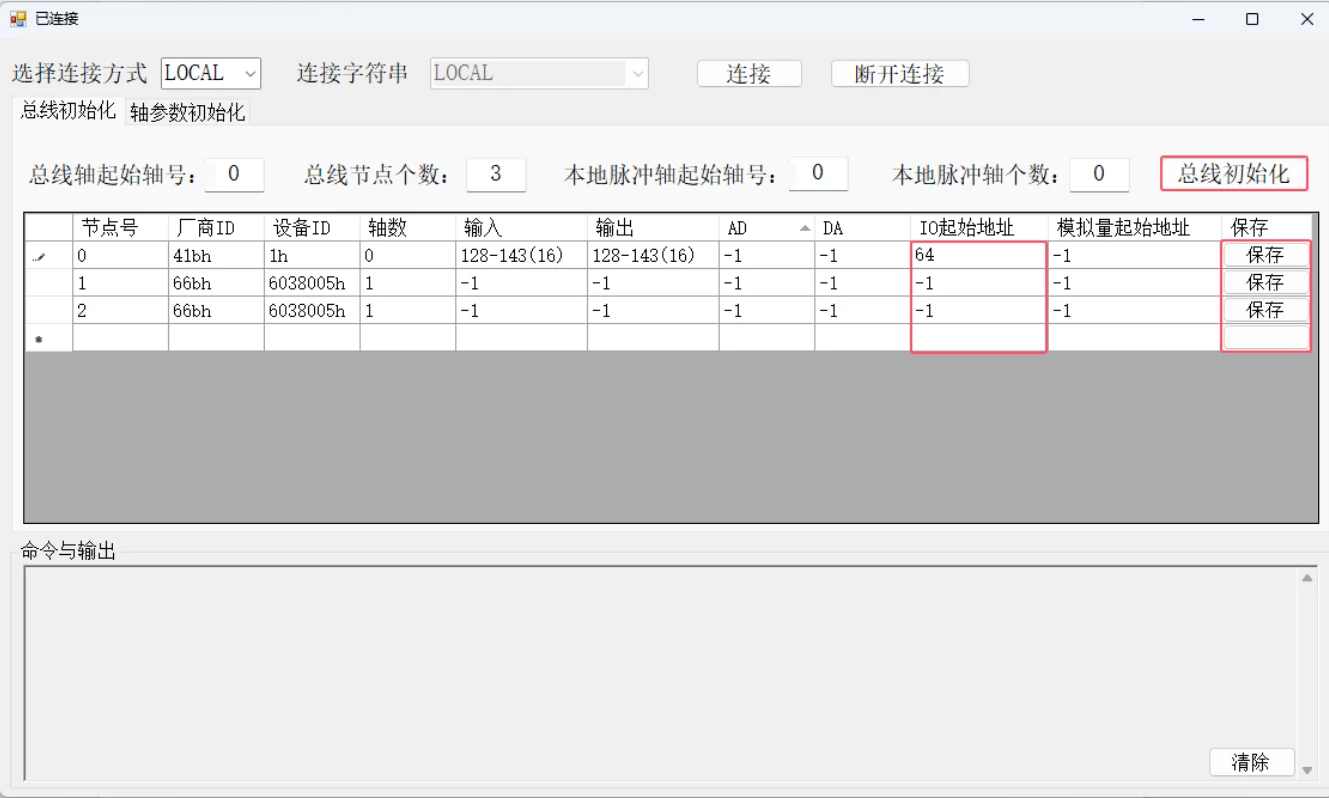
一、選擇連接方式為LOCAL連接,點擊【連接】。彈出連接成功提示框后,配置總線軸地址參數和本地脈沖軸地址參數后,點擊【總線初始化】,會在界面表格中顯示總線相關信息。
1.若無法成功總線初始化,命令與輸出窗口會打印相關錯誤信息。如:Unknown device man XXXSlot return error:3205.
報錯信息如下圖,則需要先詢問對應驅動器廠家提供XML文件。
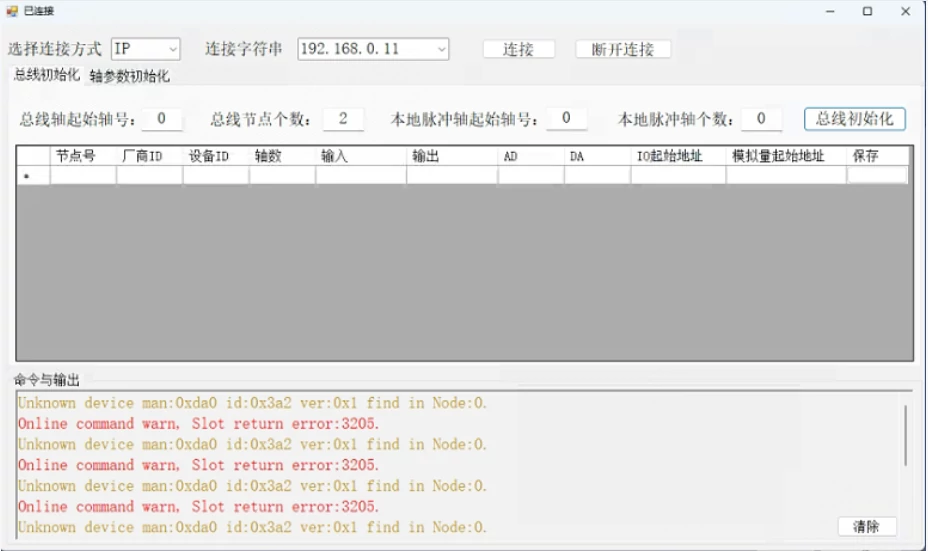

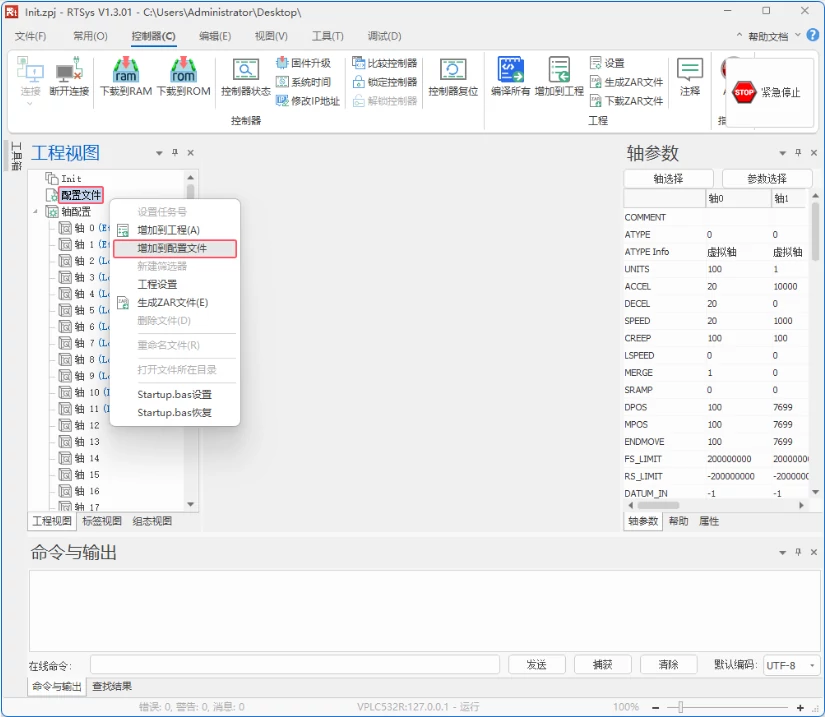
解決方法:將驅動器廠家提供的XML文件,添加到RTSys項目的配置文件中。
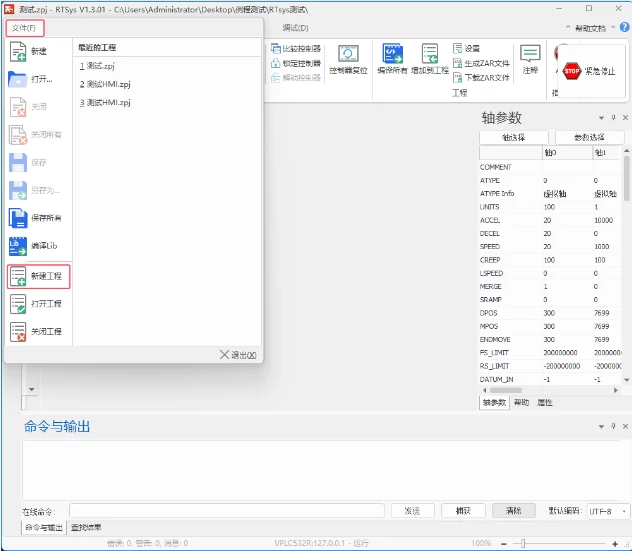
(1)打開RTSys軟件,點擊【文件】,選擇【新建工程】。
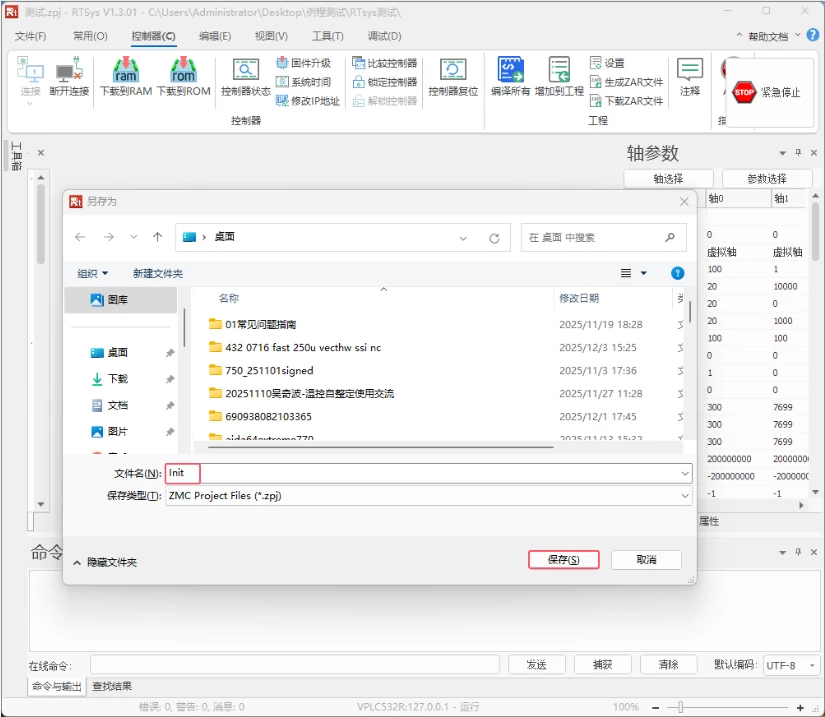
(2)選擇文件路徑,輸入文件名,然后點擊【保存】。
(3)右鍵點擊【配置文件】,選擇【添加到配置文件】,選中要添加的XML文件后點擊【打開】。
(4)點擊菜單欄中的【控制器】,接著點擊【生成ZAR文件】,隨后點擊【瀏覽】來選擇生成ZAR文件的路徑。
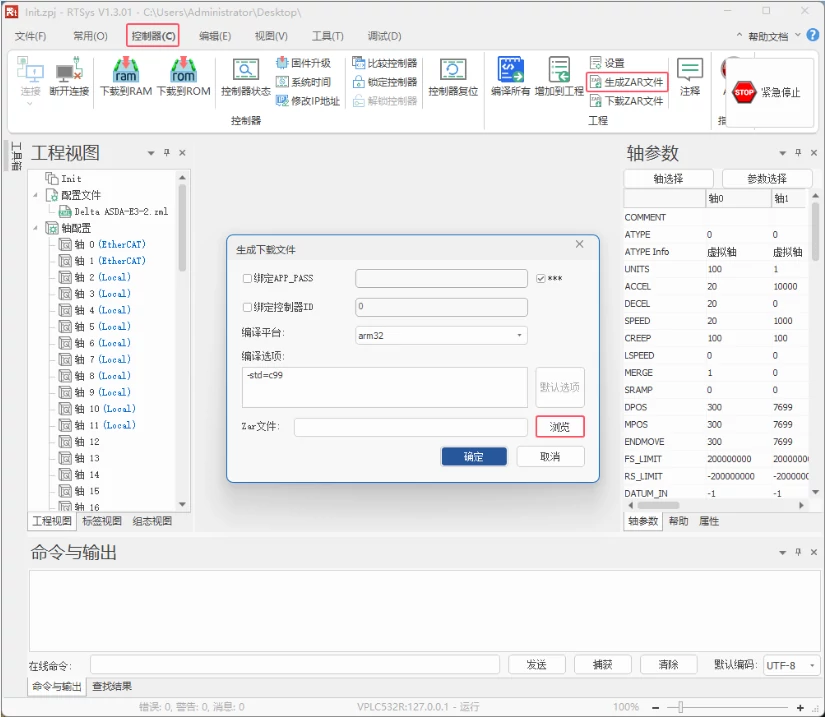
(5)將生成的ZAR文件放在項目的ZAR文件夾中,隨后進行總線初始化。
具體代碼如下:
//獲取解決方案根目錄
stringsolutionDir=Path.GetFullPath(Path.Combine(AppContext.BaseDirectory,@"......"));
stringzarPath=Path.Combine(solutionDir,"ZAR");
//獲取所有文件的完整路徑string[]fileNames=Directory.GetFiles(zarPath).Select(Path.GetFileName).ToArray();
foreach(stringfileNameinfileNames)
{
//Init.zar為下載的ZAR文件名
if(fileName=="Init.zar")
{
stringpath=Path.Combine(zarPath,"Init.zar");
zmcaux.ZAux_ZarDown(g_handle,path,0);
AppendTextOut("ZAR文件下載成功!!!",Color.DarkGoldenrod);
}
}
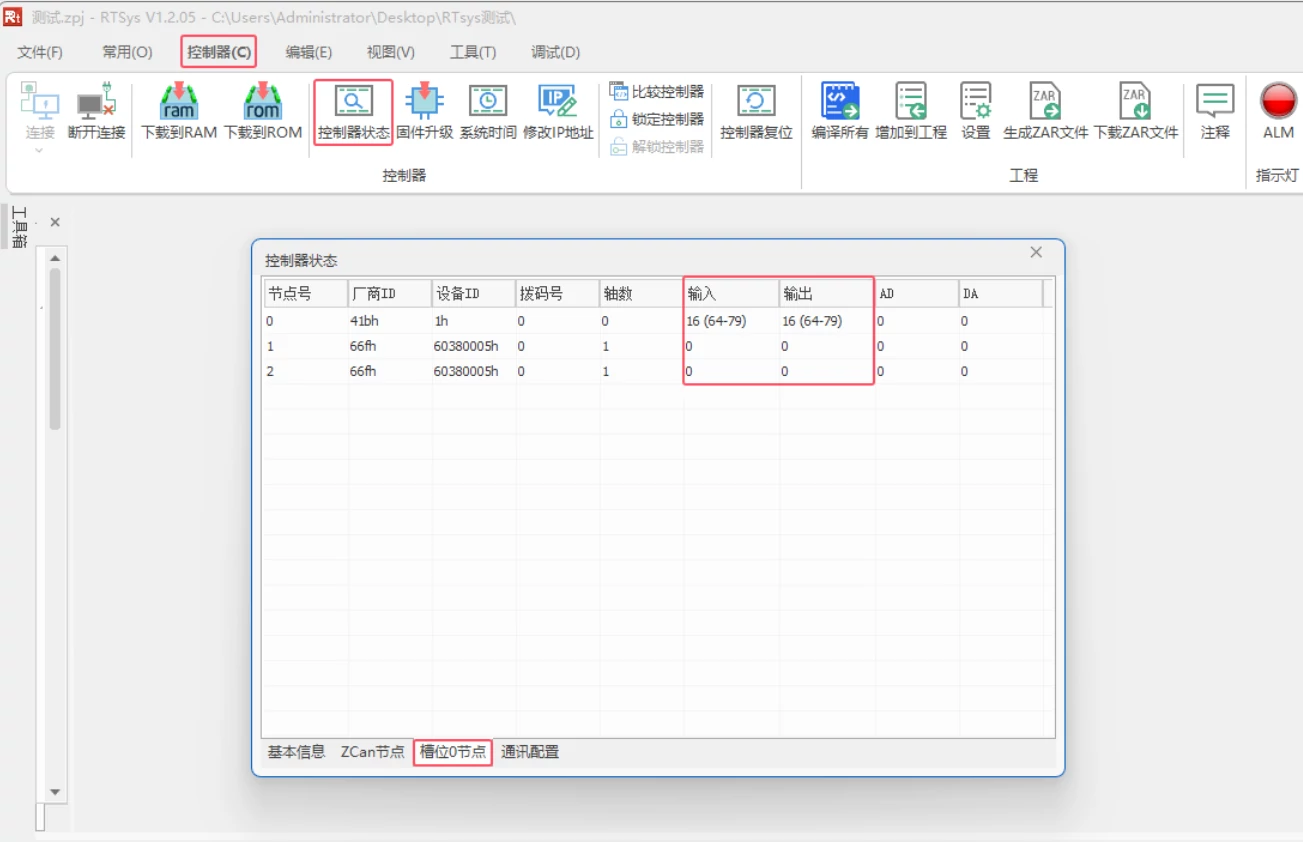
2.如需將對應總線節點的IO狀態信息或模擬量信息映射到控制器上對應起始地址查看,則修改對應節點IO或模擬量的起始地址,修改完成后,點擊【保存】,再點擊【總線初始化】。
3.通過RTSys軟件查看IO或模擬量映射的地址成功與否。
成功連接控制器后,在菜單欄中找到【控制器】→【控制器狀態】→【槽位0節點】,可以看到所有節點對應的IO或模擬量起始地址。可以在總線初始化完成后觀看此界面確認IO或模擬量起始地址映射正常。
相關代碼介紹:
(1)上位機如何鏈接上MotionRT750。
if(Controler_IP.Text!=null&&Controler_IP.Text!="")
{
intret=-1;
switch(Connect_ModeIP.Text)
{
case"IP":
//控制器IP地址連接
ret=zmcaux.ZAux_FastOpen(2,Controler_IP.Text.Trim(),5000,outg_handle);
break;
case"COM":
//控制器COM串口號連接
ret=zmcaux.ZAux_OpenCom(uint.Parse(Controler_IP.Text),outg_handle);
break;
case"LOCAL":
//LOCAL接口連接RT750
ret=zmcaux.ZAux_FastOpen(5,Controler_IP.Text.Trim(),5000,outg_handle);
break;
case"PCI":
//插入卡槽卡號連接PCI卡
ret=zmcaux.ZAux_FastOpen(4,Controler_IP.Text.Trim(),5000,outg_handle);
break;
}
if(ret!=0)
{
MessageBox.Show("IP鏈接失敗,報錯碼:"+ret.ToString());
}
else
{
if(g_handle!=(IntPtr)0)
{
//連接成功后停止所有軸
ret=zmcaux.ZAux_Direct_Rapidstop(g_handle,2);
MessageBox.Show("鏈接成功!");
this.Text="已連接";
timer1.Enabled=true;
}
}
}
(2)總線初始化結構體定義,自定義初始化所需的變量,例如LocalAxisId(本地軸起始ID)和LocalAxisNum(本地軸使用的軸數量)。
具體變量信息可以在解決方案中點擊ZMotionEcat.cs文件進行查看。
其中,DrivePdoMode用于設置每個軸的發送PDO和接收PDO的配置選擇。不同模式對應的PDO數據各不相同。
例如,若總線軸需切換至EtherCAT周期速度模式或EtherCAT周期力矩模式,則相應的PDO列表必須包含對應數據,如模式17和18支持三種總線模式。
具體列表數據請參考RTBasic手冊中的drive_profile說明。
if(textBox1.Text==""||textBox3.Text=="")
{
Console.WriteLine("總線參數不能為空");
return;
}
//定義總線初始化的信息結構體個數,最多可以支持128個節點MyEcatInit.EcatInitInfoSetecatInitInfo=new
MyEcatInit.EcatInitInfoSet(int.Parse(textBox3.Text));
?ecatInitInfo.InitStructFlag=0;//是否自定義初始化參數,設置1的話使用默認的總線初始化參數,設置成0則需要自定義總線初始化相關參數
if(ecatInitInfo.InitStructFlag!=1)
{
//1.本地軸參數,用于指定本地軸的起始ID和使用的軸數量
ecatInitInfo.LocalAxisId=int.Parse(textBox2.Text);//本地軸起始ID
ecatInitInfo.LocalAxisNum=int.Parse(textBox4.Text);//本地軸使用的軸數量
//2.驅動軸相關參數,用于指定驅動軸的起始ID和數量
ecatInitInfo.DriveAxisStart=int.Parse(textBox1.Text);//驅動軸起始ID,第1個驅動軸為DriveAxisStart,第2個為DriveAxisStart+1以此類推
ecatInitInfo.DriveAxisNum=-1;//驅動軸數量[默認-1],-1表示總線初始化的時候不判斷驅動的軸數量是否對上,若為0表示掃描到的軸數量,會檢查掃描到的軸數量是否一致
ecatInitInfo.EcatNodeNum=int.Parse(textBox3.Text);//總線節點數目[默認-1],-1表示總線初始化的時候不判斷節點個數是否對上
for(inti=0;i
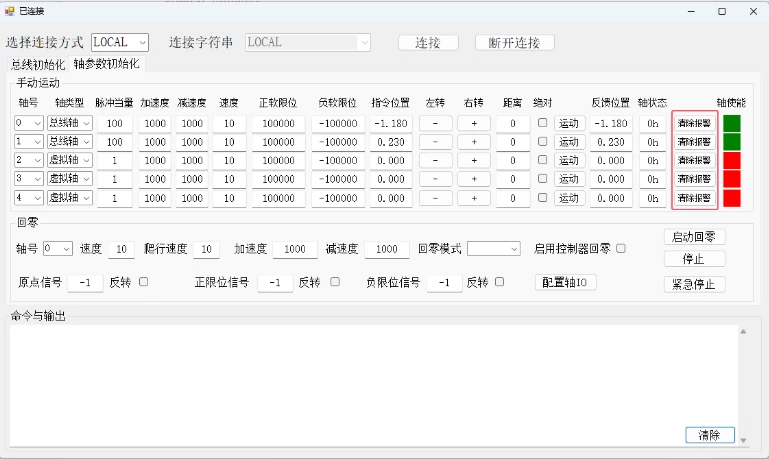
二、點擊【軸參數初始化】進入軸控制界面,開始總線軸的手動調試運動。
1.軸的使能控制。首先將軸類型切換到總線軸,再觀察軸使能狀態指示燈的顏色,可以準確判斷軸的使能情況:綠色代表已使能,紅色則表示未使能。點擊圖案即可切換軸的使能狀態。

2.配置好軸參數、軸號及相關參數后,通過左轉右轉手動調試軸運動。
建議將【脈沖當量】設置為機臺運動1mm所需的脈沖數。若按此推薦設置,【速度】的單位為mm/s,【加速度】和【減速度】的單位則為mm/s2。
通常,【加速度】和【減速度】設置為速度的10倍。
3.若在調試過程中不確定機臺運動1mm所需的脈沖數,可將【脈沖當量】設為1。
為安全起見,【速度】可先設為10,此時左右整體速度為1*10=10個脈沖每秒,【加速度】和【減速度】均設為1000。隨后手動運動軸,觀察軸是否運動及【反饋位置】是否有變化。
若手動運動時【反饋位置】數據變化但實際軸未動,可逐步將【脈沖當量】以10倍遞增,每次調整后反復手動運動,檢查軸是否運動。
【反饋位置】由編碼器反饋,若其數據變化,軸必定在運動;若肉眼難以察覺,可能是機臺運動較慢。

手動運動和寸動代碼如下:
//參數同步
zmcaux.ZAux_Direct_SetAtype(g_handle,axis[select_axis],int.Parse(atype_s[select_axis]));//設置軸類型
zmcaux.ZAux_Direct_SetUnits(g_handle,axis[select_axis],units[select_axis]);//設置脈沖當量
zmcaux.ZAux_Direct_SetAccel(g_handle,axis[select_axis],accel[select_axis]);//設置加速度
zmcaux.ZAux_Direct_SetDecel(g_handle,axis[select_axis],decel[select_axis]);//設置減速度
zmcaux.ZAux_Direct_SetSpeed(g_handle,axis[select_axis],speed[select_axis]);//設置運行速度
zmcaux.ZAux_Direct_SetFsLimit(g_handle,axis[select_axis],Fslimit[select_axis]);//設置正向軟限位
zmcaux.ZAux_Direct_SetRsLimit(g_handle,axis[select_axis],Rslimit[select_axis]);//設置負向軟限位
zmcaux.ZAux_Direct_SetFastDec(g_handle,axis[select_axis],speed[select_axis]*accel[select_axis]);//設置快減減速度,達到限位或異常停止時自動采用
Thread.Sleep(1);
if(param
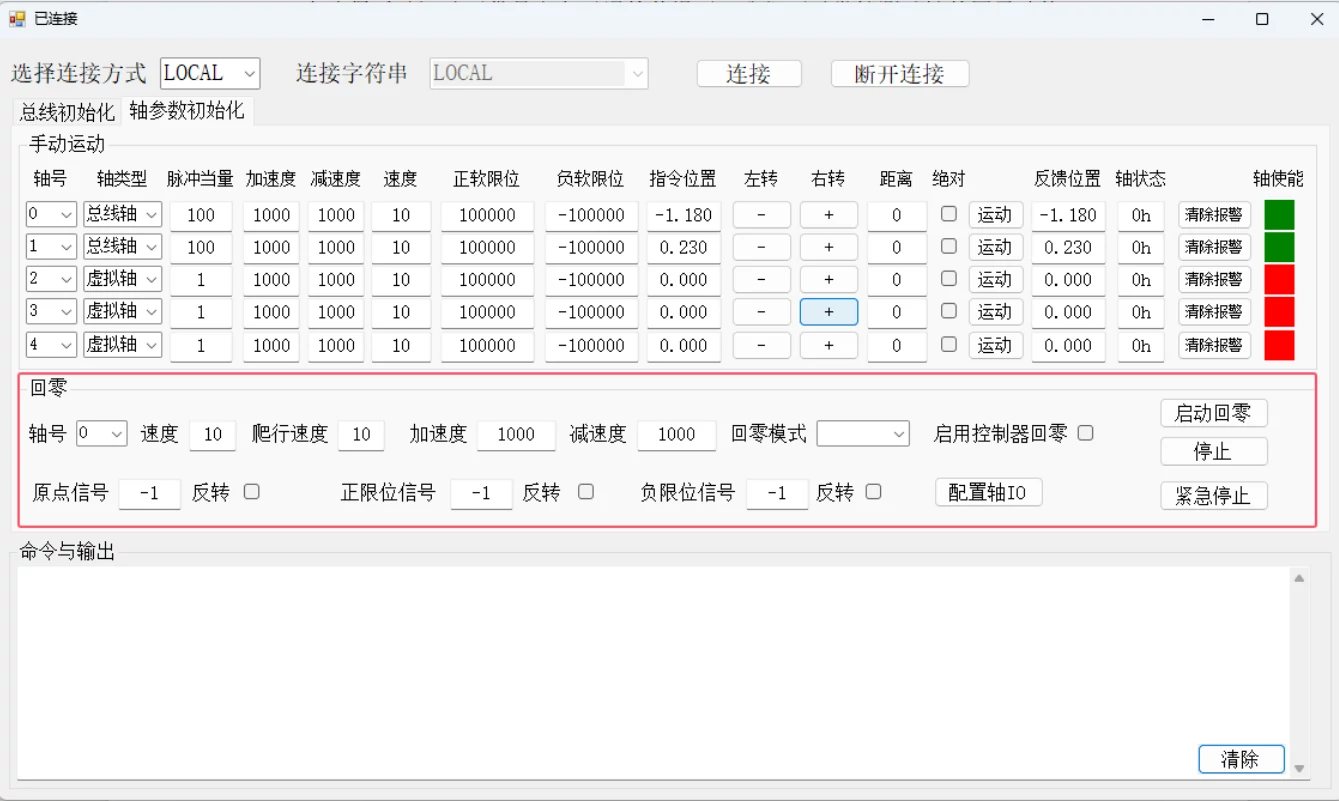
三、在確保手動運動正常且方向無誤的前提下,我們可以繼續測試軸的回零功能。
若未勾選【啟用控制器回零方式】,則默認采用總線驅動器回零(精度更高,推薦使用,驅動器回零參考驅動器手冊)。
此時,需參照總線驅動器手冊中對回零模式的說明,并將原點傳感器連接至驅動器的原點輸入口。若勾選【啟用控制器回零方式】,則使用控制器回零,具體回零方式可參考下拉框中的介紹。
在實際項目中,仍建議優先選擇總線驅動器回零。回零測試步驟如下:
1.選擇回零軸號,配置軸的正限位信號、負限位信號及原點信號后,點擊【配置軸IO】。若軸狀態顯示“30h”,則勾選【反轉】,并再次點擊【配置軸IO】。
2.配置速度、爬行速度及回零模式后,點擊【啟動回零】。若出現方向錯誤或速度過快的情況,請立即點擊【緊急停止】,并重新進行調試。
3.若軸狀態顯示“8h”,則表示驅動器出現報錯。以下是遇到驅動器報警后的處理方法。

(1)檢查驅動器上的LED面板是否顯示報錯信息,報錯時將呈現相應的錯誤碼。
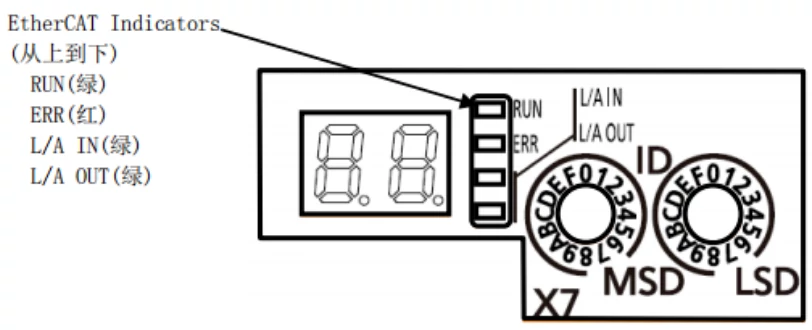
常見的錯誤,如驅動器過載和轉矩飽和異常等,均可通過【清除報警】按鈕清除。
具體代碼如下:
intposition=3;//獲取第3位
intvalue=0;
zmcaux.ZAux_BusCmd_DriveClear(g_handle,(uint)param,0);//清除總線伺服軸報警
Thread.Sleep(5000);//等待報警清除
zmcaux.ZAux_BusCmd_SDOReadAxis(g_handle,(uint)param,0x6041,0,6,refvalue);//讀取驅動器狀態字對應數據字典6041
if(((value>>position)&1)==0)
{
zmcaux.ZAux_Direct_Single_Datum(g_handle,param,0);//清除控制器報警
Thread.Sleep(100);
zmcaux.ZAux_Direct_SetAxisEnable(g_handle,param,1);//重新上使能
MessageBox.Show("報警清除成功!!!");
}
else{MessageBox.Show("報警清除失敗,重新清除或查找報錯原因!!!");}
(2)如果通過代碼無法清除報警,絕大多數驅動器報警問題可以通過斷電并重啟驅動器來解決。若斷電重啟后報警依然存在,則需參照驅動器手冊進行錯誤排查,并可咨詢驅動器技術人員以獲取解決方案。
教學視頻請點擊→PC強實時運動控制(一):C#的EtherCAT總線初始化(上)
完整代碼獲取地址
▼

本次,正運動技術PC強實時運動控制(一):C#的EtherCAT總線初始化(上),就分享到這里。
更多精彩內容請關注“正運動小助手”公眾號,需要相關開發環境與例程代碼,請咨詢正運動技術銷售工程師:400-089-8936。

正運動技術專注于運動控制技術研究和通用運動控制軟硬件產品的研發,是國家級高新技術企業。正運動技術匯集了來自華為、中興等公司的優秀人才,在堅持自主創新的同時,積極聯合各大高校協同運動控制基礎技術的研究,是國內工控領域發展最快的企業之一,也是國內少有、完整掌握運動控制核心技術和實時工控軟件平臺技術的企業。主要業務有:運動控制卡_運動控制器_EtherCAT運動控制卡_EtherCAT控制器_運動控制系統_視覺控制器__運動控制PLC_運動控制_機器人控制器_視覺定位_XPCIe/XPCI系列運動控制卡等等。
審核編輯 黃宇
-
總線
+關注
關注
10文章
3045瀏覽量
91718 -
運動控制
+關注
關注
5文章
828瀏覽量
34587 -
ethercat
+關注
關注
20文章
1524瀏覽量
45525
發布評論請先 登錄
【正運動】高速高精,超高實時性的PCIe EtherCAT實時運動控制卡 | PCIE464

EtherCAT總線運動控制的優勢主要體現在哪?
EtherCAT總線運動控制的優勢主要體現在哪?

EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(二):EtherCAT總線初始化
EtherCAT超高速實時運動控制卡(二):EtherCAT總線初始化

EtherCAT總線初始化步驟





 工商網監
工商網監
評論