 使用基于模型的設計優化電動汽車電池系統性能
使用基于模型的設計優化電動汽車電池系統性能

| 作者 : Matteo Geraci、Marco Giuffredi 和 Mattia Ambrosini,米蘭理工大學
每年,來自全球各地大學的學生團隊都會參加 SAE 方程式電動汽車大賽,這是一項國際工程競賽,要求團隊設計、制造和駕駛高性能電動汽車。雖然競賽為學習和創新提供了一個結構化的環境,但技術挑戰絕非學術性的。從最大限度提高能源效率到確保駕駛員安全,學生面臨的工程問題與專業汽車開發中遇到的問題相似。
對于 Dynamis PRC-我們位于米蘭理工大學的 SAE 方程式汽車大賽團隊-來說,電池性能對車輛的整體性能起著至關重要的作用(圖 1)。與電動汽車行業的許多工程師一樣,我們必須優化能源使用、管理熱負荷并遵守嚴格的安全和性能限制。例如,一個關鍵的競爭約束將電池系統功率輸出限制在 80 kW。這種限制,加上高速賽車的要求和長時間的熱應力(特別是在夏季),需要一個可以管理瞬時和長期功率輸出的先進電池管理系統 (BMS)。開發 BMS 算法面臨著巨大的挑戰,特別是對于缺乏電池系統本身精確模型的團隊而言。
圖 1. Dynamis PRC 的 SAE 方程式汽車大賽車輛。
我們使用基于模型設計的工作流程,通過 MATLAB,Simulink 以及 Simscape Battery 來應對這些挑戰。通過開發電池系統的詳細電氣和熱模型,我們能夠更深入地了解其運行特性,并改進作為車輛 BMS 一部分部署的功率限制算法。該算法不僅可以提前估算出保持在規定限度內所需的功率,還可以考慮耐力賽期間的熱狀況。基于仿真的方法讓我們能夠使車輛在更接近其安全運行極限的條件下運行,同時也讓我們的賽車工程師更好地了解系統行為。最終,它在提高我們車輛的性能方面發揮了關鍵作用,并幫助我們在去年的比賽中成為意大利排名第一的學生團隊。
動機和方法
我們開發 Dynamis PRC BMS 的目標是最大限度地提高車輛電池系統或“蓄電池”(在 SAE 方程式汽車大賽中通常叫法)的性能。主要目標是監控和管理蓄電池的狀態,包括荷電狀態 (SOC),這直接影響車輛的功率輸出和能源效率。BMS 的兩個核心元素(均使用基于模型的設計開發)是用于電池系統狀態估計的自適應擴展卡爾曼濾波器 (AEKF) 和實時運行的功率限制器,使車輛能夠在安全的規則規定的范圍內運行,而不會犧牲性能(圖 2)。

圖 2. 包括功率限制器的 BMS 模型的高級視圖。
我們遵循結構化、從微觀到宏觀的方法:從開發精確的電池模型開始,然后逐步建模整個電池系統及其熱特性。建模過程包括通過物理測試收集數據,然后進行模型參數化和驗證。我們執行的建模和仿真為 Simulink 中的 AEKF 和功率限制算法的開發提供了信息。
創建、參數化和驗證細胞模型
為了開發具有代表性的電池模型,我們首先通過硬件測試收集數據,包括在一系列溫度范圍內進行的開路電壓測試和混合脈沖功率特性 (HPPC) 測試(圖 3)。測試結束后,我們在 MATLAB 中清洗、分析和可視化測量數據。這些測試以及我們根據這些測試結果生成的散點圖提供了瞬時串聯電阻 R? 如何隨溫度和 SOC 變化的洞察(圖 4)。

圖 3. HPPC 測試期間的電壓和溫度圖。

圖 4. 散點圖顯示了 R? 如何隨溫度和 SOC 變化。
接下來,我們探索了兩種電路建模方法:更簡單的單極模型和更具表現力的雙極模型。后者包括兩個電阻-電容 (RC) 對,提供了明顯更好的動態保真度。使用 Optimization Toolbox,我們將時域數據擬合到指數衰減函數中,以提取雙極配置的 R?、R?、τ? 和 τ?(其中 τ = RC)。指數擬合的結果清楚地表明雙極模型更為準確,因此我們選擇它作為進一步仿真的基礎。然后,我們使用 Curve Fitting Toolbox 創建 R? 作為溫度和 SOC 函數的平滑 3D 曲面擬合,以及 R?、R?、τ? 和 τ? 的類似曲面(圖 5)。我們隨后將這些平滑表面用作 Simscape 模型和 AEKF 中的查找表 (LUT),從而能夠在各種操作條件下高效實時地估計模型參數。
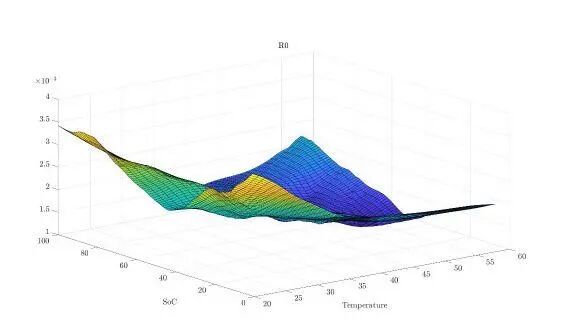

圖 5. 3D 表面顯示 R?、R?、R?、τ? 和 τ? 如何隨溫度和 SOC 變化。
我們在 Simulink 中使用從擬合階段生成的查找表中提取的模型參數進行了驗證。對于我們的開環仿真,電流被用作唯一輸入,并且電壓的仿真輸出直接與 HPPC 測試數據進行比較。該模型準確,平均電壓誤差僅為 4.5 mV (0.1%)。大部分錯誤發生在仿真即將結束時,可能是因為模型略微低估了電池的容量,導致低 SOC 時電壓出現小幅漂移(圖 6)。

圖 6. 比較 HPPC 測試的測量電壓和仿真電壓。
使用 Simscape 和 Simscape Battery 對電池系統進行建模
為了將電池級特性擴展到完整的電池系統模型,我們使用 Simscape 和 Simscape Battery 對電池組中的所有 720 個電池的電氣和熱行為進行建模,這些電池組由 144 個電池串聯排列在五個并聯分支上。
單獨仿真所有 720 個電池在計算上過于龐大,因此我們專注于單個串聯分支(五個并聯分支之一),同時考慮不對稱電流分布引起的關鍵非理想因素。這種非理想行為源于母線和互連中的電阻,導致五個分支之間的電流分配不均勻。特別是,第一個分支在物理上最接近電池系統端子連接器,由于其位置和母線的電阻而經歷更高的電壓降。我們認為這個分支是最關鍵的仿真分支,因為在功率限制算法中,預測電池電壓作為電流的函數非常重要,以避免超過電池電壓安全限值 (2-4.25V)。本質上,功率限制算法的 SOC 估計基于該分支,由于其電壓下降,該分支代表了五個分支中最差的性能。
在 Simscape 中,我們開發了一個模型,使我們能夠同時仿真電池組的電氣和熱特性。我們首先創建了一個 CellModel_battery 代表 144 個電池的整個系列分支的塊,包含從早期擬合工作中得出的溫度和 SOC 相關值的查找表(圖 7)。然后,我們將五個分支級塊組合起來,以表示完整的并行配置(圖 8)。

圖 7.用于仿真單個并聯分支的電氣和熱特性的 Simscape 模型。

圖 8. 具有五個并聯分支的電池組的電氣和熱模型。
這種建模方法使我們能夠更好地了解電池系統中不均勻的電流分布,并觀察它如何影響電壓動態 - 特別是在壓力最大的串聯分支中。當我們將其仿真輸出與在汽車越野賽期間從賽道上的車輛捕獲的測量輸出進行比較時,該模型被證明是相當準確的(圖 9)。此外,它還提供了有關冷卻要求和分支之間的熱耦合的重要見解。

圖 9. 仿真電池系統電壓(紅色)與軌道測試期間電流(黑色)波動時捕獲的測量電壓(藍色)的比較。
實現和部署 AEKF 和功率限制器
高保真 Simscape 模型在幫助我們理解和描述電池系統的動態行為以及使我們在早期設計和驗證階段獲得深刻見解方面發揮了至關重要的作用。為了在車輛的 STM32 微控制器上部署我們的功率限制器算法,我們需要一個計算效率更高的解決方案來估算 SOC,這是管理電力使用的關鍵輸入。在 Simulink 中,我們基于 Simscape 模型開發了降階狀態空間模型,并將其實現為用于嵌入式部署的 AEKF。為了驗證這個簡化模型,我們將其 SOC 估計值與更復雜的 Simscape 模型的 SOC 估計值進行了比較,發現差異在可接受的范圍內。
在 Simulink 中繼續,我們開發了功率限制算法。該算法根據 SOC 估計、熱限制(最高 60°C)和競爭規則來限制最大允許功率(圖 10)。

圖 10. 功能限制器的 Simulink 模型。
此前,我們使用過一些較為基礎的方法,包括基于模型參考自適應系統 (MRAS) 算法的方法,但該方法在最近的耐力賽中已被證明存在問題。AEKF 提供了更平滑的 SOC 估計,而沒有我們在 MRAS 算法中看到的顯著誤差峰值(圖 11)。我們對 AEKF 和功率限制器進行了閉環仿真,以驗證兩個模型的功能和集成。

圖 11. EKF(藍色)和 MRAS(紅色)方法的 SOC 估計的平方誤差。
我們驗證了模型后,就使用 Embedded Coder 生成了用于在 STM32 微控制器上部署的 C 代碼。初始實現消耗了微控制器大約 75% 的 RAM 和 20% 的 ROM。在應用了一些優化技術之后,例如將數據類型從雙精度(64 位)更改為單精度(32 位)、簡化查找表以及調整 Simulink 中的代碼生成選項,我們將內存使用率降低到 RAM 的 2% 以下和 ROM 的 3% 以下。通過在車輛微控制器上部署優化代碼,我們準備開始進行廣泛的軌道測試,在實際駕駛條件下對系統進行評估。
以基于模型的設計駕馭未來
使用 MATLAB 和 Simulink 進行基于模型的設計是我們電池系統開發每個階段的核心——從分析實驗電池數據到在 Simscape 中創建單個電池的精確模型,仿真整個電池組的熱和電行為,最終實現和部署強大的功率限制算法。
前幾年,由于 SOC 估計技術不夠準確,我們的賽車工程師不得不采取更為保守的駕駛策略,導致賽道性能下降。今年,通過經過驗證的電池模型和可靠、優化的功率限制算法,我們能夠更加自信地將車輛推向其性能極限。建模和估算的改進不僅帶來了更好的比賽結果,而且還讓我們更深入地了解電池系統在現實條件下的表現。
隨著一些 Dynamis PRC 團隊成員畢業,其他人則繼續在此基礎上改進模型、增強算法,并年復一年地繼續釋放車輛的更多性能。
-
電動汽車
+關注
關注
156文章
12656瀏覽量
237193 -
matlab
+關注
關注
189文章
3028瀏覽量
239099 -
電池系統
+關注
關注
9文章
423瀏覽量
31009
原文標題:使用基于模型的設計優化電動汽車電池系統性能
文章出處:【微信號:MATLAB,微信公眾號:MATLAB】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
電動汽車電機
【GoKit申請】電動汽車電池管理系統開發
電動汽車電池斷開系統
電動汽車的高性能運行離不開這項試驗
電動汽車無線充電優化匹配研究
回收電動汽車電池,電動汽車電池回收,回收電動汽車電池組,電動汽車電池組回收,回收電動汽車電池組回收
電動汽車驅動系統性能分析




 工商網監
工商網監
評論