 基于STM32的礦井作業環境監測系統的設計與實現
基于STM32的礦井作業環境監測系統的設計與實現

煤礦開采作業中瓦斯爆炸等安全隱患嚴重,針對這一問題,設計了基于STM32的礦井環境監測系統。該系統實時監測瓦斯濃度、溫度、火情、粉塵等環境參數,自動控制除塵、滅火、通風等設備,保障礦井安全。通過WiFi傳輸數據至機智云物聯網平臺,支持手機APP遠程監控與操作,提升應急響應和管理效率。
PART 01
系統總體結構
系統實現了對礦井內甲烷氣體體積分數、粉塵濃度、火焰信號及溫濕度等關鍵參數的實時采集與分析;并通過預設的自動控制策略觸發聯動設備,實現安全隱患的快速響應與主動防控。同時,支持數據遠程傳輸至云端平臺,并通過機智云APP提供實時監控、報警及遠程操控功能,為礦井安全管理提供高效、可靠的技術支撐。系統總體結構如圖1所示。
PART 02
系統詳細設計
2.1 總體設計
礦井作業環境監測系統啟動后,依次執行以下流程:首先,完成STM32主控芯片的時鐘樹配置、中斷控制器初始化及GPIO端口功能定義;隨后,分別對OLED顯示模塊、MQ-2/MQ-4氣體傳感器陣列、DHT11溫濕度傳感器、ESP8266 WiFi通信模塊及繼電器控制單元進行外設驅動加載。進入主循環后,優先檢測物理按鍵輸入狀態:若檢測到閾值設置觸發信號,OLED將分屏顯示氣體/溫度雙閾值參數,用戶可通過組合按鍵實現閾值調節與E2PROM存儲;若無設置請求,則直接執行環境參數采集任務。
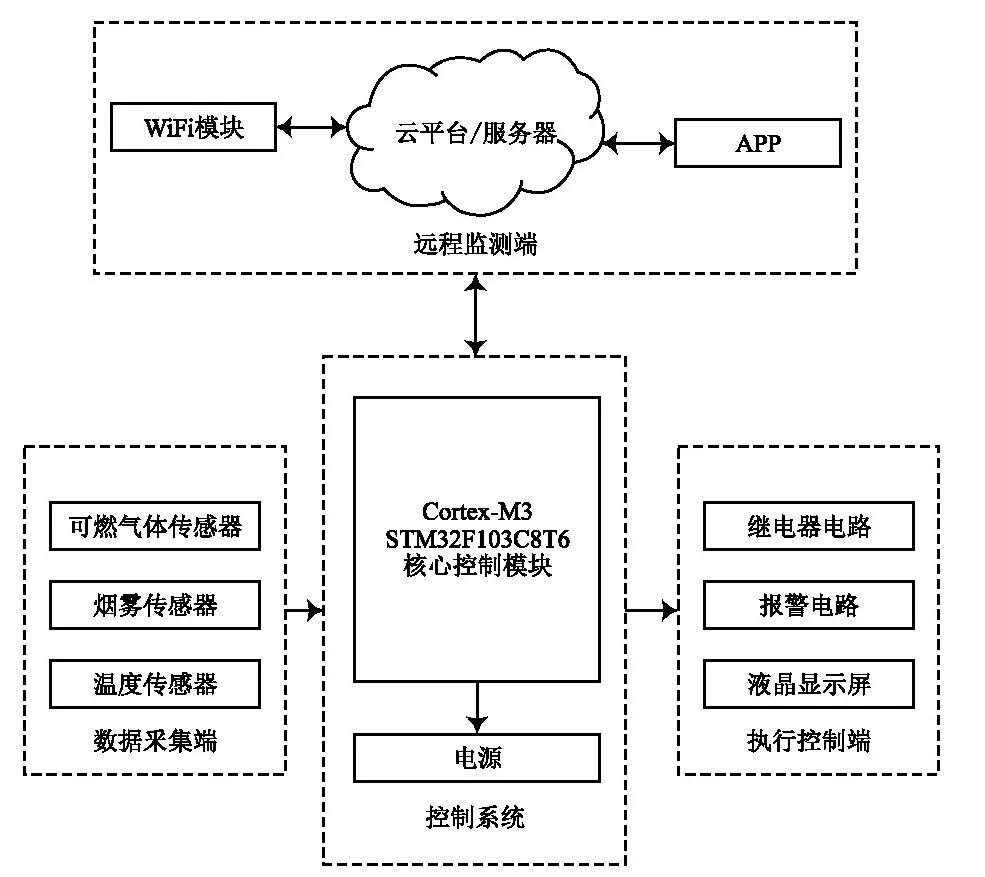
圖1 礦業作業環境檢測系統結構
系統采用優先級檢測機制,首先通過ADC通道獲取可燃氣體體積分數:當檢測值超過閾值時,立即激活由蜂鳴器與LED組成的多級聲光報警系統,通過MQTT協議向云端推送報警代碼,同時驅動繼電器執行燃氣閥門閉鎖、通風設備啟停等安全聯動控制;若氣體體積分數處于安全范圍,則通過單總線協議獲取DHT11溫度數據,當溫度異常時觸發散熱系統并發送分級預警信號。
所有環境參數均以1 Hz頻率刷新至OLED交互界面,并通過JSON格式封裝后上傳至機智云AIoT平臺。系統內置指令緩沖隊列,可實時響應遠程控制指令(如設備強制啟停),執行完畢后重新進入監測循環,形成“環境感知-數據分析-風險處置-信息同步”的完整閉環,實現礦井作業環境的智能化監測與主動式安全防護。系統總體流程如圖2所示。
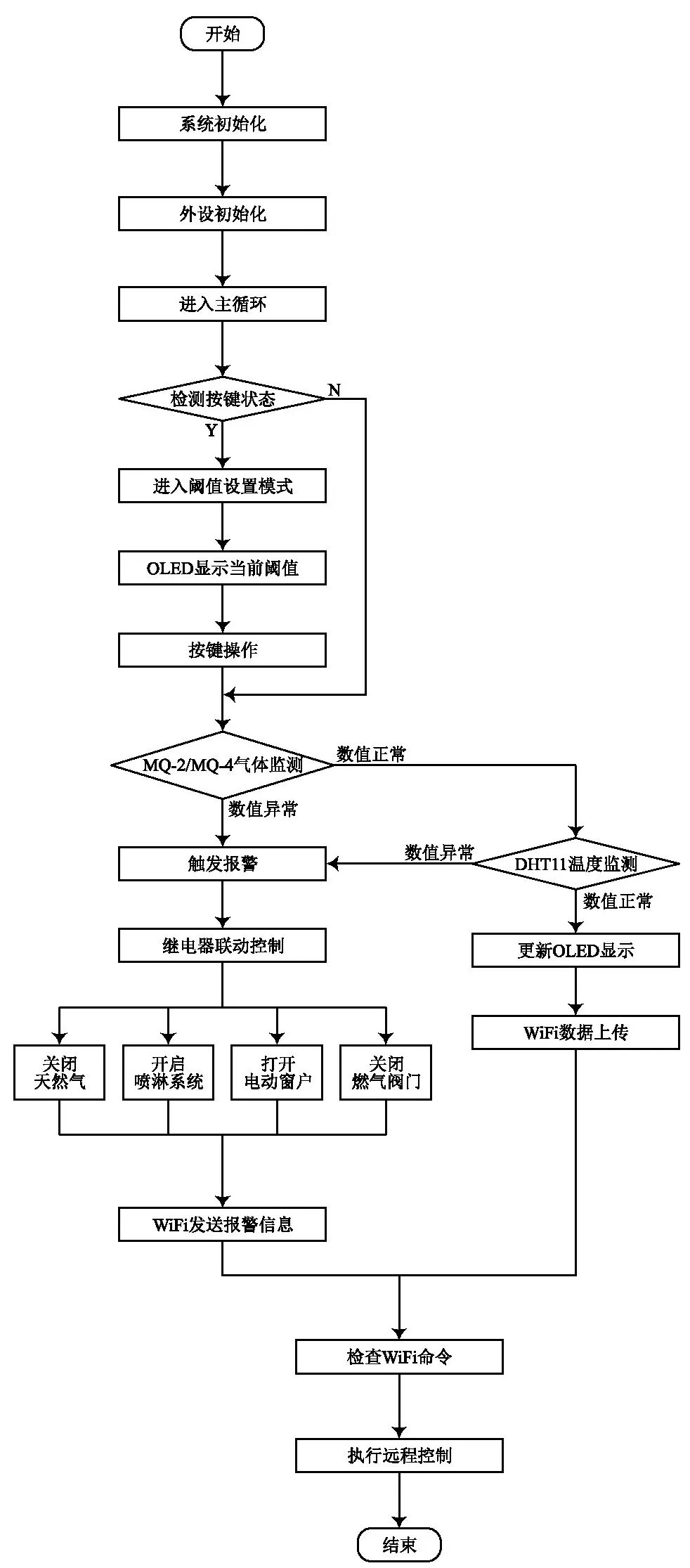
圖2 礦井作業環境監測系統總體流程
2.2 溫度監測設計
本文選用DHT11溫濕度傳感器模塊,采用三引腳封裝(VCC/DATA/GND),DATA引腳通過上拉電阻連接至主控GPIO,在單總線協議下數據線與主控嚴格共地。傳感器供電范圍為3.3~5.5 V,上電后需經過預熱期以穩定內部晶振,通信時序要求系統具備毫秒級中斷響應能力。為防止信號干擾,PCB布局時數據線長度需小于20 cm,并通過施密特觸發器進行波形整形。
溫度監測流程始于傳感器驅動初始化。主控單元通過單總線協議向DHT11發送啟動脈沖,完成時序同步與預熱準備。持續監測傳感器響應狀態,若未收到低電平應答信號,則重新發送同步脈沖直至建立有效通信。
成功獲取原始數據后,采用奇偶校驗機制驗證數據完整性:若校驗失敗,則自動重發啟動信號,直至獲取有效數據包;若校驗通過,則解析數據幀,提取高8位溫度整數部分和低8位小數部分,經單位換算后輸出標準溫度值。溫度監測的流程如圖3所示。
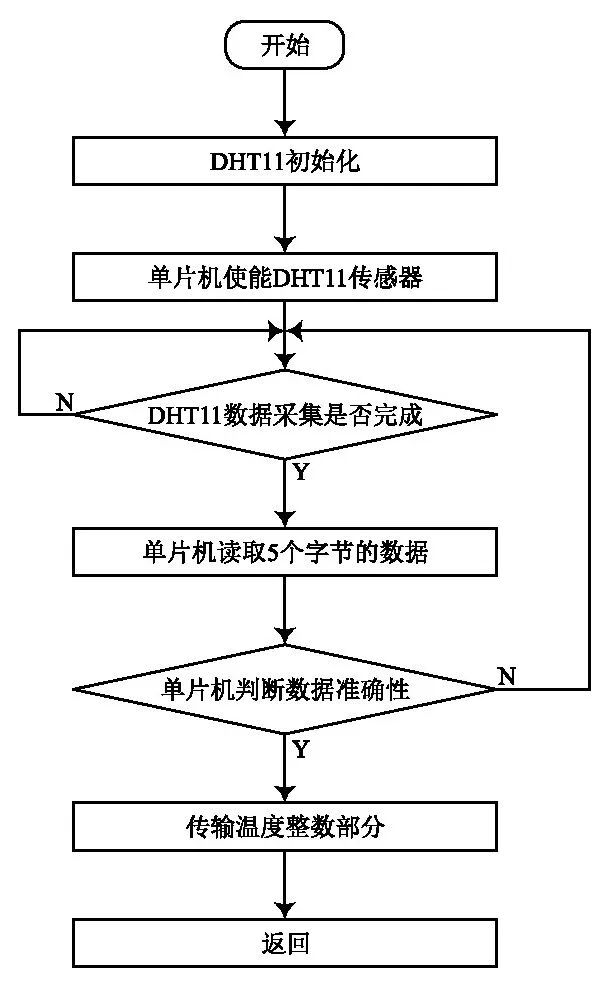
圖3 溫度監測流程
2.3 甲烷體積分數監測設計
MQ-4甲烷傳感器的模擬輸出端接入主控的ADC通道,采用TL431基準源為其提供2.5 V的參考電壓。在硬件設計方面,設置了兩級RC濾波電路,用于抑制高頻噪聲;傳感器的加熱器由MOS管驅動,并采用獨立的5 V電源供電。ADC的采樣率設置為1 MS/s,同時通過電壓跟隨器實現阻抗匹配。此外,傳感器配備可調的負載電阻,以優化其靈敏度。
烷監測流程啟動時,主控單元首先配置ADC采樣精度與通道參數,通過定時器觸發模式啟動模數轉換。獲取原始ADC值后,采用加權滑動平均濾波算法抑制信號噪聲,并結合溫度補償系數對原始數據進行校正。基于傳感器標定曲線進行線性插值計算,將濾波后的數字量轉換為體積分數值。當體積分數值超過三級報警閾值時,更新狀態寄存器報警標志位,觸發相應的應急響應等級;若處于安全范圍則復位報警狀態,最終通過DMA通道將處理結果傳輸至顯示模塊。甲烷監測流程如圖4所示。
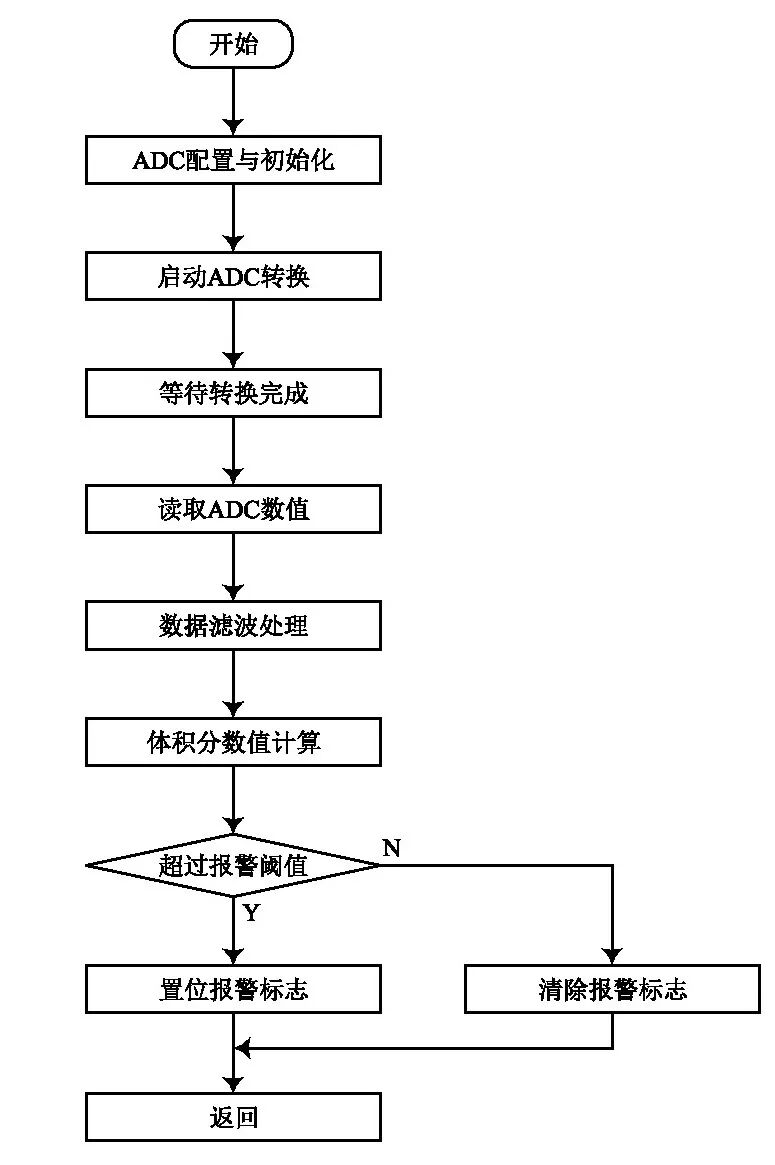
圖4監測流程圖
2.4 舵機執行器模塊
SG90舵機的控制線連接至高級定時器的TIM1_CH1,PWM波形需滿足規定的周期及高電平脈寬要求。在硬件設計上,設置了光耦隔離電路,以防止反向電動勢干擾;舵機電源采用LM2596降壓模塊,該模塊能夠獨立提供6 V/2 A的驅動能力。將死區時間配置為500 ns,以避免H橋直通同時,通過GPIO接口獲取機械限位開關的反饋信號,以此監測舵機的位置狀態。
在舵機控制流程初始化階段,需對高級定時器的PWM輸出模式進行配置,設定基準頻率為50 Hz并校準死區時間。角度控制采用脈寬映射方式,通過調整PWM的占空比,實現0~180°范圍內的精確轉角。執行機構動作包含兩個穩態首先驅動舵機轉動至安全位置(90°)并維持500 ms,以確保機械到位;隨后復位至待機位置(0°),至此完成設備狀態切換的完整控制周期。舵機執行器流程如圖5所示。
2.5 OLED顯示模塊
0.96 英寸的SSD1306 OLED顯示屏通過SPI接口連接主控,其引腳構成四線制通信鏈路。顯存映射采用頁地址模式,通過電位器調節VCOMH電壓,進而改變硬件對比度。背光電路由PWM控制亮度等級,在設置數據刷新速率時需注意匹配DMA突發傳輸模式。
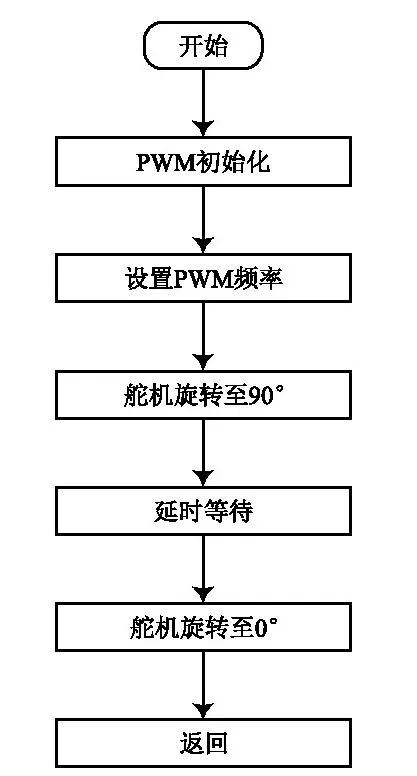
圖5 舵機執行器流程
OLED顯示流程采用雙緩沖機制:初始化階段加載通信協議,配置像素顯存結構;數據刷新時,首先清除當前幀緩沖區,根據數據特性選擇ASCII字符集或自定義字庫;采用行列掃描算法將浮點型傳感器數據轉換為定點顯示格式,通過DMA傳輸實現屏幕區域的無閃爍局部更新,最終在垂直消隱期間執行顯存整體刷寫,以確保顯示內容的實時性與連續性。OLED顯示流程如圖6所示。
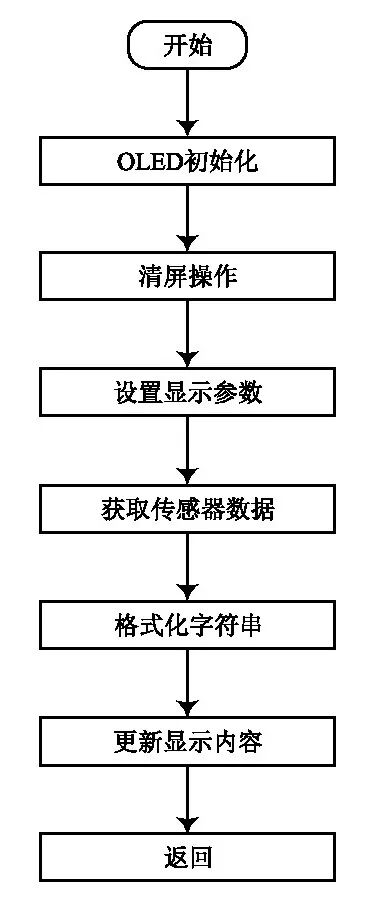
圖6 OLED顯示流程
2.6 ESP8266 WiFi模塊設計
ESP8266 WiFi模塊通過UART2與主控通信,CH_PD使能引腳通過10 kΩ上拉電阻連接至3.3 V電源。在硬件設計方面,通過AP2112K-3.3 V LDO穩壓器持續提供800 mA電流;同時,為RF部分預留π型匹配網絡。天線區域遵守1.6 mm凈空規則,GPIO0/GPIO2通過跳線帽設置啟動模式,RST引腳連接主控的PB0引腳,以實現看門狗聯動復位功能。
ESP8266 WiFi模塊初始化后,首先嘗試建立網絡連接,若連接失敗,則觸發提示并進入循環遞減重試計數,直至剩余次數歸零或連接成功;若連接正常,則與目標模塊建立通信鏈路。校驗連接狀態失敗時同樣進入重試流程,成功時則進入數據傳輸階段。通過發送請求指令并接收遠程響應數據,完成雙向通信交互,結束本次通信周期。數據通信流程如圖7所示。
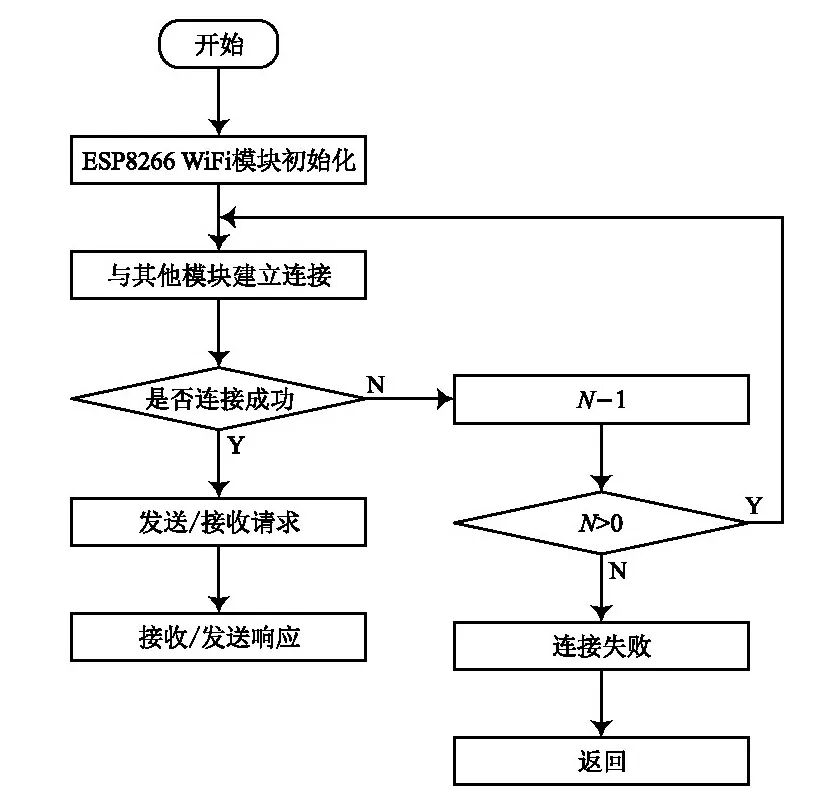
圖7 ESP8266 WIFI模塊數據通信流程
PART 03
數據云傳輸設計
3.1 機智云手機APP調試介紹
機智云是專注于物聯網與云服務的開發平臺,通過提供一站式智能硬件開發及全生命周期服務,以自助工具、開放SDK/API簡化開發流程,降低技術門檻與成本,助力開發者快速實現產品智能化升級并連接終端用戶。本設計則通過WiFi模塊采集甲烷體積分數、火情、粉塵濃度、溫度等數據并上傳至機智云平臺,其設備接入流程如圖8所示。
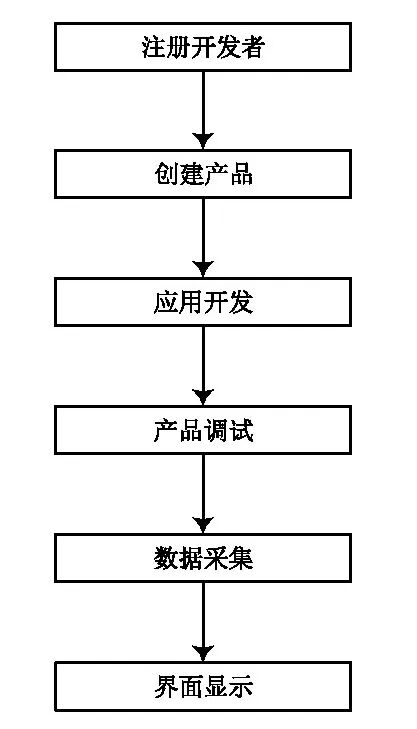
圖8 機智云設備接入流程
3.2 開發流程及步驟
機智云開發流程主要分為產品創建與功能配置、硬件集成與移動端部署兩大階段。首先,需注冊機智云賬號并創建產品,選擇自定義方案并配置通信參數。通過標準化引用或自定義創建兩種方式定義數據點,最終生成包含環境監測開關、預警調節、安全狀態顯示等功能的APP交互界面。完成邏輯配置后,生成MCU SDK工程,通過下載中心補充傳感器驅動文件,在軟件開發環境中集成溫濕度傳感器、甲烷傳感器等硬件的驅動代碼,最終通過串口工具燒錄至開發板。
移動端通過機智云APP實現設備聯網:在ESP8266模塊配網模式下,采用熱點配網連接熱點,成功后可操作APP內的環境控制系統,實時查看溫度、瓦斯含量等安全數據,完整實現礦井監測系統的無線控制與預警功能。最終形成的礦井作業環境監測APP界面示意圖如圖9所示。

圖9 APP界面示意圖
PART 04
結語
基于STM32的礦井環境監測系統,創新性地提升了礦井安全監測技術。通過實時監測甲烷濃度、溫度、火情和粉塵等數據,系統能夠有效預防安全事故,并自動調節相關設備,確保礦井安全。同時,WiFi無線傳輸技術和云平臺的應用,使得監測者可通過APP遠程操作,顯著提高應急響應速度與管理效率。
-
物聯網
+關注
關注
2947文章
47909瀏覽量
416055 -
STM32
+關注
關注
2310文章
11172瀏覽量
373786 -
監測系統
+關注
關注
8文章
3078瀏覽量
84587
發布評論請先 登錄
如何在米爾-STM32MP257開發板上實現環境監測系統
無線傳感器網絡怎么助力礦井環境監測?
無線環境監測系統怎么實現?
14個環境監測系統設計案例
智能環境監測系統設計
基于單片機的稻田環境監測系統具有哪些功能
基于STM32單片機的室內環境監測系統的設計資料分享

環境監測的革新者:UWB模塊在環境監測系統中的應用研究
基于STM32設計的倉庫環境監測與預警系統

STM32項目分享:礦井環境監測系統




 工商網監
工商網監
評論