 基于迅為RK3588開發板實現高性能機器狗主控解決方案-?AI能力實戰:YOLOv5目標檢測例程
基于迅為RK3588開發板實現高性能機器狗主控解決方案-?AI能力實戰:YOLOv5目標檢測例程

基于迅為RK3588開發板實現高性能機器狗主控解決方案-AI能力實戰:YOLOv5目標檢測例程
本文旨在分享一種基于迅為RK3588開發板的低成本、高性能、全開源的機器狗主控解決方案。該方案充分利用了RK3588強大的算力、豐富的接口和出色的AI能力,為機器人愛好者、高校科研團隊及企業提供了一個絕佳的快速開發平臺。
一、引言:為何選擇迅為RK3588?
機器狗作為腿式機器人的典型代表,對主控器的計算性能、實時性、接口豐富度和功耗提出了極高要求。
迅為RK3588開發板以其卓越的性能,成為了解決這些問題的理想選擇:
·強大算力:RK3588采用四核A76+四核A55CPU,以及ARMG610MP4GPU,為復雜的運動學解算、環境感知和決策規劃提供充沛的通用算力。
·AI性能:內置6TOPS算力的NPU,可高效運行YOLO等視覺模型,實現實時目標跟蹤、姿態識別與語義SLAM。
·極致接口擴展性:PCIe接口、多個USB3.0/2.0、雙千兆網口、豐富的SPI/I2C/UART,可輕松連接激光雷達、IMU、深度相機、多個舵機/電機驅動器等外設。
·多屏異顯:支持多顯示屏輸出,便于本地調試、狀態監控與遠程控制。
·成熟的生態:迅為提供了完善的Linux(Ubuntu、Debian)和Android系統支持,降低了底層開發的難度。
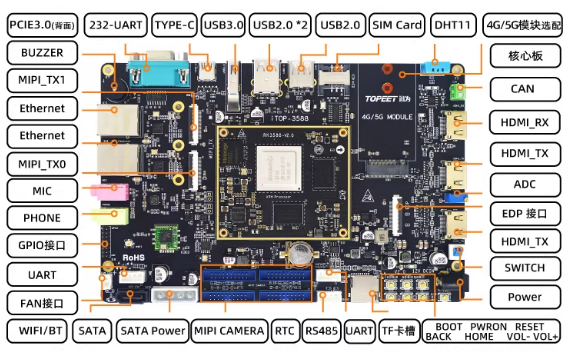
二、系統硬件架構
關鍵硬件選型建議:
·主控:迅為RK3588開發板(核心板+底板)。
·執行器:數字舵機(如Dynamixel)或帶編碼器的無刷電機,具體取決于機器狗的負載和精度要求。
·傳感器:
·視覺:IntelRealsenseD435i/D455(RGB-D相機,提供顏色和深度信息)。
·感知:2D/3D激光雷達(如思嵐A1或速騰聚創的3D雷達),用于建圖和避障。
·姿態:高性能IMU(如MPU6050/9250,BMI088),用于狀態估計。
·通信:4G/5G模塊(通過PCIe接口)或Wi-Fi6模塊,實現遠程遙控和視頻回傳。
·電源:大容量鋰電池(如6SLiPo)配合高效的DC-DC降壓模塊,為整個系統提供穩定供電。
三、軟件與算法棧
軟件系統采用經典的機器人分層架構,在迅為RK3588的Ubuntu系統上運行。
1.操作系統層
·迅為提供的Ubuntu20.04/22.04:作為基礎操作系統,穩定且社區支持完善。
迅為RK3588開發板為機器狗乃至更復雜的移動機器人領域注入了一股新的活力。它成功地打破了高性能與高成本之間的壁壘,使得更多團隊和個人能夠參與到前沿機器人技術的研發中。
迅為iTOP-RK3588開發板不僅可用于科研和教育,在安防巡檢、災難救援、娛樂陪伴等場景也擁有巨大的應用潛力。
四、AI能力實戰:YOLOv5目標檢測例程
為展示RK3588NPU的強大AI算力,迅為開發板提供了開箱即用的YOLOv5例程。
部署與測試步驟如下:
1.獲取例程:編譯好的yolov5例程已經放在了“iTOP-3588開發板\02_【iTOP-RK3588開發板】開發資料
\15_NPU例程測試配套資料\08_rknn_model_zoo測試\12_yolov5”目錄下,如下圖所示:

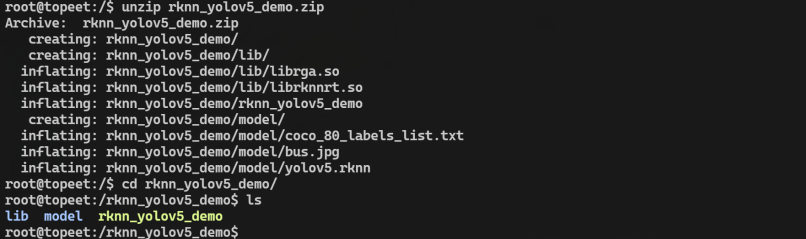
2.部署到開發板:將該文件拷貝到開發板上,并解壓,解壓完成如下圖所示:
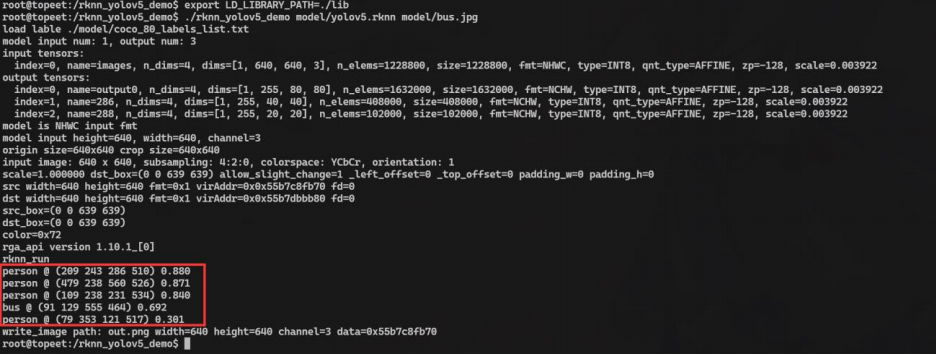
3.執行推理:然后進入該文件夾,使用以下命令運行可執行文件,實現圖片的位置和種類識別,如下圖
所示:
export LD_LIBRARY_PATH=./lib
./rknn_yolov5_demo model/yolov5.rknn model/bus.jpg
4.查看結果:最后會在當前目錄下生成推理完成的圖片,如下圖所示:

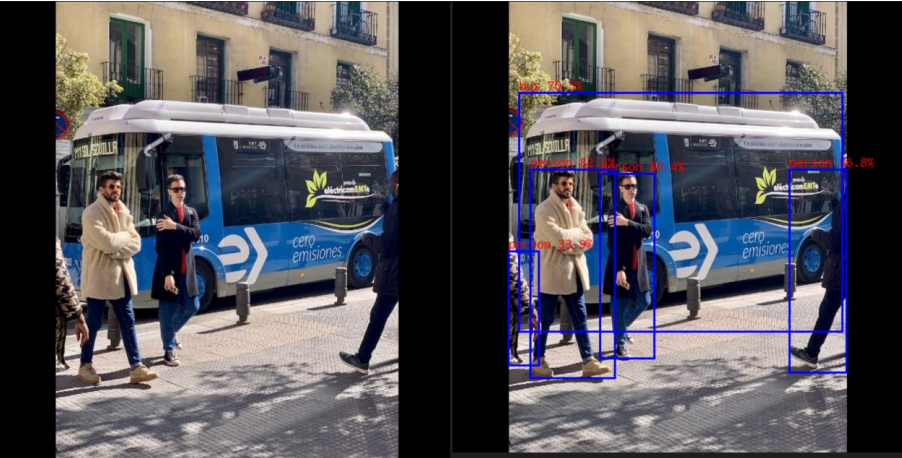
可以看到不同的人以及公交車就被識別了出來,證明模型推理成功。
-
開發板
+關注
關注
26文章
6161瀏覽量
114179 -
機器狗
+關注
關注
3文章
184瀏覽量
10894 -
RK3588
+關注
關注
8文章
503瀏覽量
7101
發布評論請先 登錄

基于迅為RK3588【RKNPU2項目實戰1】:YOLOV5實時目標分類
RK3588 技術分享 | 在Android系統中使用NPU實現Yolov5分類檢測
基于迅為RK3568/RK3588開發板的AI圖像識別方案
迅為RK3588開發板深度剖析丨首選的性能
迅為瑞芯微RK3588開發板深度剖析丨首選的性能
RK3588 技術分享 | 在Android系統中使用NPU實現Yolov5分類檢測
讓NPU跑起來iTOP_RK3588開發板在Linux系統中使用NPU

RK3588 技術分享 | 在Android系統中使用NPU實現Yolov5分類檢測-迅為電子


技術分享 | RK3588基于Yolov5的目標識別演示






 工商網監
工商網監
評論