") RK平臺(tái)PWM開(kāi)發(fā)總結(jié)
RK平臺(tái)PWM開(kāi)發(fā)總結(jié)

一、PWM基礎(chǔ)原理與RK平臺(tái)特性
(一)PWM核心原理
脈寬調(diào)制(PWM,Pulse Width Modulation)通過(guò)微處理器數(shù)字輸出控制模擬電路,核心是調(diào)整輸出波形的周期(信號(hào)重復(fù)的時(shí)間間隔)和占空比(一個(gè)周期內(nèi)高電平持續(xù)時(shí)間占比),實(shí)現(xiàn)對(duì)電壓、亮度等物理量的精準(zhǔn)調(diào)控,廣泛應(yīng)用于測(cè)量、通信、功率控制等領(lǐng)域。
(二)RK平臺(tái)PWM關(guān)鍵特性
1.支持模式:共3種模式,不同模式用途差異顯著
?Continuous mode(連續(xù)模式):持續(xù)輸出固定周期和占空比的波形,是最常用模式,主要用于背光控制、電機(jī)調(diào)速等場(chǎng)景
?One-shot mode(單觸發(fā)模式):僅輸出一個(gè)完整波形后停止,適用于單次觸發(fā)的控制場(chǎng)景(如單次脈沖信號(hào)觸發(fā))
?Capture mode(捕獲模式):用于捕獲外部輸入波形的高低電平寬度,典型應(yīng)用是紅外遙控解碼(配合中斷實(shí)現(xiàn)鍵值識(shí)別)
1.硬件配置:內(nèi)置4通道,每個(gè)通道對(duì)應(yīng)獨(dú)立控制單元,支持多設(shè)備同時(shí)使用PWM功能
2.內(nèi)核兼容性:覆蓋Linux 3.10、4.4及以上(含4.19)內(nèi)核版本,不同版本在驅(qū)動(dòng)接口、DTS配置上存在差異
二、RK平臺(tái)PWM開(kāi)發(fā)操作流程
(一)驅(qū)動(dòng)相關(guān)配置
1.驅(qū)動(dòng)文件路徑與差異
?統(tǒng)一路徑:drivers/pwm/pwm-rockchip.c(所有內(nèi)核版本通用)

?內(nèi)核版本差異:
Linux 3.10:使用原始接口(pwm_config()、pwm_enable()、pwm_disable()),僅支持Continuous mode
Linux 4.4及以上(含4.19):將參數(shù)配置與使能/禁用封裝為pwm_apply_state()函數(shù),支持一次修改多個(gè)參數(shù)(周期、占空比、極性),效率更高,同樣僅支持Continuous mode
1.DTS節(jié)點(diǎn)配置:需根據(jù)內(nèi)核版本調(diào)整參數(shù)數(shù)量,與“pwm-cells”值對(duì)應(yīng)

backlight: backlight {compatible ="pwm-backlight";pwms = <&pwm0?0250000>;brightness-levels = <01...255>;// 256級(jí)亮度,0~255對(duì)應(yīng)0%~100%占空比default-brightness-level = <200>;// 默認(rèn)亮度(第200級(jí))enable-gpios = <&gpio1?13GPIO_ACTIVE_HIGH>;// 背光使能引腳};
?參數(shù)說(shuō)明
參數(shù)1:index(通道索引),默認(rèn)0(RK平臺(tái)每個(gè)PWM芯片僅1個(gè)通道)
參數(shù)2:周期(單位:ns),如25000ns對(duì)應(yīng)40KHz頻率
參數(shù)3:極性(可選),PWM_POLARITY_INVERTED表示負(fù)極性,僅“pwm-cells=3”時(shí)需配置
?版本差異示例
Linux 3.10(pwm-cells=2):pwms = <&pwm 0 25000>;
Linux 4.4/4.19(pwm-cells=3):pwms = <&pwm 0 25000 PWM_POLARITY_INVERTED>;
?背光場(chǎng)景擴(kuò)展配置:需添加亮度等級(jí)、默認(rèn)亮度、使能引腳等參數(shù),示例如下
(二)PWM工作流程(以Linux 4.4為例,Continuous mode)
1.狀態(tài)應(yīng)用(Apply State):觸發(fā)PWM參數(shù)配置流程,先判斷是否需要加鎖
?需加鎖:先執(zhí)行Lock操作,避免配置過(guò)程中參數(shù)被篡改
?無(wú)需加鎖:直接進(jìn)入?yún)?shù)配置
1.參數(shù)配置
?必選:配置周期(Period)和占空比(Duty Cycle)
?可選:若支持極性配置(pwm-cells=3),設(shè)置極性(Normal/Inverted)
1.鎖操作:若之前加鎖,配置完成后執(zhí)行Unlock
2.使能/禁用控制
?需使能(Enable PWM=yes):執(zhí)行Enable操作,PWM開(kāi)始輸出波形
?需禁用(Enable PWM=no):執(zhí)行Disable操作,PWM停止輸出
1.狀態(tài)同步(Sync State):確保硬件狀態(tài)與配置參數(shù)一致,完成流程
(三)用戶(hù)空間使用(通過(guò)/sys/class/pwm接口)
1.導(dǎo)出PWM通道:進(jìn)入/sys/class/pwm/pwmchip0/,執(zhí)行echo 0 > export,生成pwm0目錄(關(guān)閉通道執(zhí)行echo 0 > unexport)
2.配置參數(shù):進(jìn)入pwm0目錄,通過(guò)文件寫(xiě)入配置
?周期:echo 10000 > period(10000ns=10μs,對(duì)應(yīng)100KHz頻率)
?占空比:echo 5000 > duty_cycle(5000ns,占空比50%)
?極性:echo normal > polarity(normal =正極性,inversed =負(fù)極性)
1.使能輸出:echo 1 > enable(禁用執(zhí)行echo 0 > enable)
三、RK平臺(tái)PWM主要用途
(一)背光控制(最典型場(chǎng)景)
基于Continuous mode,通過(guò)調(diào)整PWM占空比控制背光亮度:
?正極性:亮度等級(jí)0~255對(duì)應(yīng)占空比0%~100%(等級(jí)越高越亮)
?負(fù)極性:亮度等級(jí)與占空比反向(等級(jí)越高越暗)
?應(yīng)用:顯示屏背光調(diào)節(jié),如手機(jī)、平板、電視等設(shè)備
(二)紅外遙控解碼(基于Capture mode)
1.原理:PWM捕獲紅外接收頭輸出的高低電平寬度,觸發(fā)中斷后CPU讀取寄存器值,根據(jù)NEC編碼協(xié)議(RK平臺(tái)僅支持NEC)解碼用戶(hù)碼和鍵值碼
2.操作流程
&remotectl {handle_cpu_id = <2>;// 中斷處理CPU核心(4核0~3,雙核0~1)ir_key1{rockchip,usercode = <0x4040>;rockchip,key_table = <0xf4KEY_UP>, <0xf1KEY_DOWN>;// 鍵值與功能映射};};
?打開(kāi)調(diào)試開(kāi)關(guān):
echo1 > sys/module/rockchip_pwm_remotectl/parameters/code_print
?記錄鍵值:按下遙控器按鍵,通過(guò)打印獲取usercode(如0x4040)和鍵值(如0xe9)
?添加鍵值到DTS:在&remotectl {}節(jié)點(diǎn)中配置usercode和key_table,示例
(三)其他用途
?電機(jī)調(diào)速:通過(guò)調(diào)整PWM占空比控制電機(jī)轉(zhuǎn)速(如風(fēng)扇、小功率電機(jī))
?電壓調(diào)節(jié)(PWM Regulator):配合電源管理模塊,輸出不同占空比的PWM信號(hào)實(shí)現(xiàn)電壓動(dòng)態(tài)調(diào)整
四、常見(jiàn)問(wèn)題與解決方案
(一)U-Boot與Kernel銜接問(wèn)題
1.問(wèn)題現(xiàn)象:U-Boot中使用PWM調(diào)壓后,進(jìn)入Kernel階段PWM失效(如電壓不足死機(jī))
2.原因:
?Kernel未同步U-Boot階段的PWM硬件狀態(tài)(如clock count)
?兩者時(shí)鐘源頻率、極性、周期配置不一致
1.解決方案
?更新驅(qū)動(dòng)文件:drivers/pwm/pwm-rockchip.c
?統(tǒng)一配置:U-Boot與Kernel的GPLL時(shí)鐘頻率(PWM時(shí)鐘掛在GPLL下)、極性、周期保持一致;U-Boot頻率通過(guò)開(kāi)機(jī)log查看,Kernel頻率通過(guò)cat /sys/kernel/debug/clock/clock_tree | grep gpll查看
(二)PWM Regulator引腳上下拉配置問(wèn)題
1.問(wèn)題現(xiàn)象:系統(tǒng)重啟(reboot)后,PWM Regulator默認(rèn)電壓變化
2.原因:重啟時(shí)GRF寄存器不復(fù)位,但PWM控制器復(fù)位,引腳上下拉配置為“none”導(dǎo)致?tīng)顟B(tài)異常
3.解決方案
// dtsi中定義pwm2_pin_pull_down: pwm2-pin-pull-down {rockchip,pins = <119RK_FUNC_1 &pcfg_pull_down>;};// dts中覆蓋&pwm2 {status ="okay";pinctrl-names ="active";pinctrl-0= <&pwm2_pin_pull_down>;};
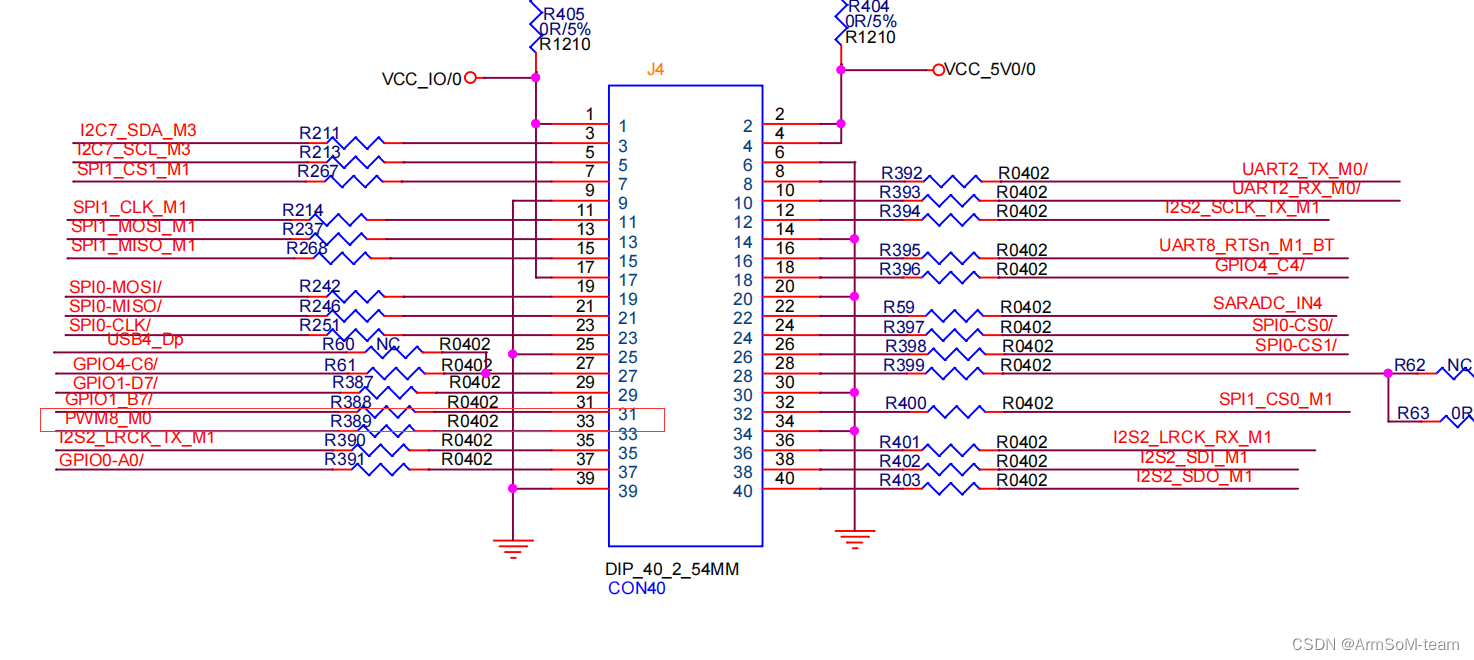
?確認(rèn)硬件默認(rèn)上下拉:通過(guò)原理圖查看引腳標(biāo)識(shí)(“d”=下拉,“u”=上拉,如RK3399 PWM2引腳GPIO1_C3/PWM2_d為默認(rèn)下拉)
?DTS配置引腳上下拉:在dtsi中定義pinctrl,dts中覆蓋配置,示例
(三)PWM波形示波器無(wú)法檢測(cè)
1.第一步:檢查PWM是否工作(通過(guò)Counter Register寄存器)
?寄存器值變化:PWM工作正常,問(wèn)題在引腳
可能原因:iomux配置錯(cuò)誤(引腳功能未切換為PWM)、io-domain配置錯(cuò)誤、外部硬件干擾
解決方案:重新配置iomux和io-domain,排查硬件接線或干擾源
?寄存器值無(wú)變化:PWM工作異常,問(wèn)題在核心配置
可能原因:時(shí)鐘未使能、PWM未使能、duty>period(占空比配置無(wú)效)、RK3368未配置GRF_SOC_CON15寄存器bit12=1
解決方案:使能時(shí)鐘和PWM,修正duty與period關(guān)系,RK3368額外配置GRF寄存器
五、思維導(dǎo)圖總結(jié)
 ?
?
-
PWM
+關(guān)注
關(guān)注
116文章
5875瀏覽量
225958 -
微處理器
+關(guān)注
關(guān)注
11文章
2431瀏覽量
85956 -
脈寬調(diào)制
+關(guān)注
關(guān)注
3文章
238瀏覽量
39455
發(fā)布評(píng)論請(qǐng)先 登錄
RK3588開(kāi)發(fā)板(armsom-w3)之PWM實(shí)操
基于小凌派RK2206開(kāi)發(fā)板:OpenHarmony如何使用IoT接口控制PWM外設(shè)

【瑞芯微RK1808計(jì)算棒試用體驗(yàn)】RK3399 平臺(tái)使用RK1808 加速棒總結(jié)
ROC-RK3308-CC開(kāi)發(fā)實(shí)例總結(jié)
基于RK3399 PWM驅(qū)動(dòng)開(kāi)發(fā)的過(guò)程是怎樣的?
記錄總結(jié)一下基于RK3128平臺(tái)的LCD驅(qū)動(dòng)調(diào)試步驟
Firefly-RK3399--PWM介紹

Firefly-RK3288PWM輸出介紹
Firefly-RK3128主板PWM輸出介紹
迅為5G工業(yè)互聯(lián)網(wǎng)方案RK3399開(kāi)發(fā)平臺(tái)
OpenHarmony:如何使用HDF平臺(tái)驅(qū)動(dòng)控制PWM
迅為RK3576開(kāi)發(fā)板高算力低成本工業(yè)級(jí)核心板卡開(kāi)發(fā)平臺(tái)

RK平臺(tái)Linux IOMMU開(kāi)發(fā):從原理到實(shí)戰(zhàn)



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論