 自動駕駛中常提的卷積神經網絡是個啥?
自動駕駛中常提的卷積神經網絡是個啥?

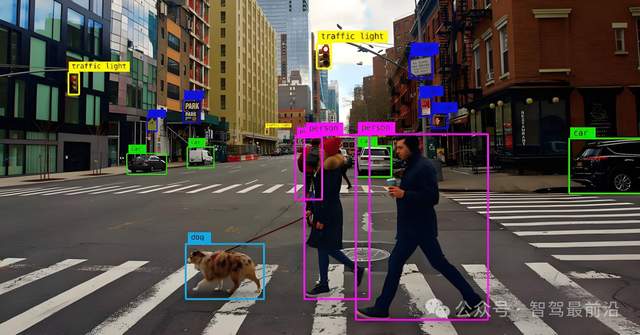
[首發于智駕最前沿微信公眾號]在自動駕駛領域,經常會聽到卷積神經網絡技術。卷積神經網絡,簡稱為CNN,是一種專門用來處理網格狀數據(比如圖像)的深度學習模型。CNN在圖像處理中尤其常見,因為圖像本身就可以看作是由像素排列成的二維網格。
卷積神經網絡可以概括為“從局部入手,逐步抽象”的一項技術,即通過一系列可學習的運算,讓網絡能夠自動從原始像素中識別出邊緣、角點、紋理等基礎特征,再逐步組合成更高級的語義信息,最終完成類似“識別出一只貓”這樣的感知任務。

圖片源自:網絡
和傳統的全連接網絡相比,CNN不僅參數更少,還能更好地適應圖像中物體的平移變化,因此在計算效率和泛化能力上的表現會更加出色。
01核心組件和工作原理
想理解清楚CNN,要抓住“卷積核滑動”與“層層抽象”兩個要點。卷積操作就像拿著一個小窗口在圖像上逐格滑動,每次將窗口內的像素值與一組可訓練的權重(也就是卷積核或濾波器)做點乘并求和,得到輸出特征圖上的一個數值。
這樣訓練的目的,正是調整這些卷積核的參數,讓它們能提取出有用的特征。由于卷積核遠小于整張圖像,并且在整個圖像上共享參數,這種“局部連接”和“參數共享”的設計,大大減少了網絡的參數量。
卷積層后面通常會接一個如ReLU這樣的非線性激活函數,它的作用是把負數值置零,從而引入非線性,讓網絡能夠表達更復雜的關系。之后就會進行如最大池化這樣的下采樣操作,它在局部區域中選取最大值輸出,這樣不僅能降低數據維度、壓縮信息,還能增強網絡對平移的魯棒性。
通過多個卷積層和池化層的堆疊,網絡會逐層把低級特征信息(如邊緣、紋理)組合成中級特征信息(如角點、局部形狀),再進一步抽象為高級特征信息(如物體部件或語義概念)。在網絡的末端,這些特征會被“展平”,再輸入到全連接層或經過全局池化處理,最終通過分類器(如softmax)輸出每個類別的概率。

圖片源自:網絡
卷積并不局限于二維圖像。它可以擴展到一維數據(如語音、時間序列)和三維數據(如醫學影像中的體積數據)。對于多通道輸入(例如彩色圖像的RGB三個通道),卷積核也會為每個通道配備一組權重,分別計算后再求和,生成單通道的特征圖。而為了提取不同類型的特征,可同時使用多個卷積核,以便得到多個特征圖(也稱為輸出通道)。
02訓練、優化與常見技巧
訓練CNN的基本流程與其他神經網絡類似,即先定義損失函數(分類任務常用交叉熵損失),再通過反向傳播計算梯度,最后使用優化器(如隨機梯度下降SGD或Adam)更新網絡參數。在卷積層中,反向傳播本質上是對卷積運算求導,分別計算卷積核和輸入數據的梯度并更新。
在卷積神經網絡的訓練過程中,學習率、批次大小和權重初始化等超參數的選擇至關重要,它們共同決定了訓練過程的穩定性和模型的最終性能。為了抑制過擬合、提升模型的泛化能力,可綜合運用以下幾種實用技巧。
數據增強是非常有效的一種方法。通過對訓練圖像進行隨機翻轉、裁剪、旋轉或調整亮度對比度等操作,可以顯著增加數據的多樣性,這能迫使模型學習更加魯棒,而不是僅僅記住訓練集中的特定樣本。
權重衰減(L2正則化)和Dropout(隨機屏蔽部分神經元)等正則化手段也是一種有效方式,不過在卷積層中使用Dropout通常會低于全連接層。批量歸一化如今已成為訓練深層網絡的標準配置,它通過對每批數據進行規范化處理,有效穩定了訓練過程,加快了收斂速度,并允許我們使用更大的學習率。此外,在訓練過程中動態調整學習率的策略,以及根據驗證集表現適時停止訓練的“早停法”,也都是防止模型過擬合的常用手段。
除了上述訓練技巧,模型架構層面的改進也會對訓練結果產生深遠影響。殘差連接的引入是一項關鍵突破,它通過允許信息跨層直接傳遞,有效緩解了深層網絡中的梯度消失問題,使得訓練上百層的超深網絡成為可能。
圖片源自:網絡
深度可分離卷積則從計算效率入手,將標準的卷積操作拆解為逐通道卷積和逐點卷積兩個步驟,從而大幅降低了計算量和參數數量,這一設計對于在手機等移動設備上部署模型尤為關鍵。在實際的工程部署中,還會進一步運用模型壓縮、量化等技術,對訓練好的網絡進行優化,以確保其在資源受限的環境中也能高效運行。
03重要架構演進與設計選擇
回顧卷積神經網絡的發展歷程,可以清晰地了解其設計思想的演變。早期的LeNet成功地將卷積思想應用于手寫數字識別,證明了其有效性。隨后,AlexNet在大規模圖像分類競賽中取得突破性成果,極大地推動了深度學習的熱潮。VGG網絡則通過反復堆疊小巧的3x3卷積核,構建起結構規整而深厚的網絡,證明了深度的重要性。Inception系列則另辟蹊徑,采用并行結構來同時捕捉不同尺度的特征。ResNet引入的殘差連接,從根本上解決了深度網絡的訓練難題。近年來,為了在準確率和效率間取得平衡,出現了像MobileNet(使用深度可分離卷積)和EfficientNet(復合縮放模型深度、寬度和分辨率)這樣的輕量級架構。
卷積神經網絡在計算機視覺領域的應用已經非常廣泛,從基礎的圖像分類,到目標檢測、語義分割、人臉識別、姿態估計,乃至圖像生成和檢索,都能看到它的身影。
當然,CNN也有局限性,它在捕捉圖像中的長距離依賴及全局關系方面,天生不如基于自注意力機制的Transformer模型靈活。雖然可以通過加深網絡或使用大卷積核來擴大感受野,但這會帶來計算成本的急劇上升。此外,其引以為傲的平移不變性,在某些需要精確定位(如實例分割)的任務中,也需要額外的機制來輔助。
04最后的話
卷積神經網絡通過“局部感知、參數共享、層次化抽象”這一核心思想,為處理圖像等網格數據提供了一個強大而高效的框架。卷積神經網絡的優勢,源于它與生俱來的合理結構。它采用“從小范圍入手”的策略,通過局部連接和權重共享,一層層地從圖像中提取特征,從簡單的邊緣、紋理,逐步組合成復雜的物體部件和整體概念。這種設計不僅極大地減少了需要計算的參數數量,更讓它天生就擅長處理圖像這類數據。這使CNN在擁有出色識別能力的同時,也保證了很高的計算效率,成為計算機視覺領域堅實的技術基石。
-
自動駕駛
+關注
關注
794文章
14939瀏覽量
180803 -
卷積神經網絡
+關注
關注
4文章
372瀏覽量
12897
發布評論請先 登錄
自動駕駛中常提的占用網絡檢測存在哪些問題?
自動駕駛中常提的“深度估計”是個啥?

Transformer如何讓自動駕駛變得更聰明?
NMSIS神經網絡庫使用介紹
自動駕駛中常提的“強化學習”是個啥?

自動駕駛中常提的“專家數據”是個啥?

自動駕駛中常提的ODD是個啥?

自動駕駛中常提的硬件在環是個啥?
自動駕駛中常提的RTK是個啥?

自動駕駛中常提的慣性導航系統是個啥?可以不用嗎?

自動駕駛中常提的世界模型是個啥?

自動駕駛中常提的HMI是個啥?
自動駕駛中常提的“點云”是個啥?

自動駕駛中常提的“NOA”是個啥?

自動駕駛感知系統中卷積神經網絡原理的疑點分析




 工商網監
工商網監
評論