") 【干貨】必看!APM飛控核心技術(shù)解析與實戰(zhàn)指南
【干貨】必看!APM飛控核心技術(shù)解析與實戰(zhàn)指南

一、產(chǎn)品概述與定位
APM飛控是開源無人機飛行控制系統(tǒng)的標桿產(chǎn)品,具有開源免費、靈活擴展、生態(tài)成熟三大核心優(yōu)勢。該系統(tǒng)不僅成為無人機入門者的首選學(xué)習(xí)平臺,更是專業(yè)開發(fā)者驗證創(chuàng)新算法的重要載體。
二、發(fā)展歷程與開源意義
APM飛控源于2007年DIYDrones社區(qū)發(fā)起的ArduPilot開源項目,其演進歷程體現(xiàn)了一個成熟開源項目的發(fā)展軌跡:
1.x系列:實現(xiàn)基礎(chǔ)遙控與穩(wěn)定飛行功能2.x系列:新增航點飛行、參數(shù)自定義調(diào)整等核心功能3.x系列:實現(xiàn)跨越式升級,3.2.1版本支持多旋翼、固定翼、VTOL等多種機型
三、分層技術(shù)架構(gòu)解析
硬件平臺演進與模塊化設(shè)計
經(jīng)典APM2.8硬件采用Atmel ATmega2560 8位微控制器作為主處理器,配備ATmega32U4輔助處理器專責(zé)通信任務(wù)。傳感器套件包括:
MPU6050六軸傳感器:集成三軸陀螺儀與三軸加速度計,采樣率最高1kHz,數(shù)據(jù)傳輸延遲≤1msHMC5883L三軸磁力計:提供航向參考,修正陀螺儀漂移MS-5611氣壓計:測量精度可達毫米級,為定高飛行提供核心數(shù)據(jù)GPS模塊:標配UBLOX NEO-6M/7M,支持GPS/GLONASS雙模定位
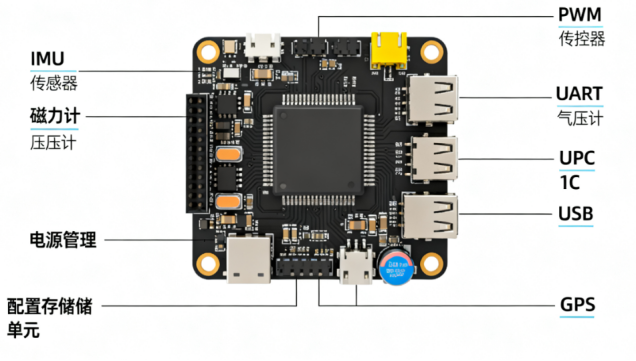
為提升性能,社區(qū)推出了基于32位STM32F4處理器的硬件方案,采用“中心輻射式”接口布局,提供8路PWM輸出、4路UART串口及I2C/SPI接口。
軟件架構(gòu)與代碼組織
ArduPilot固件采用模塊化架構(gòu),代碼托管于GitHub,已超過100萬行,遵循GPLv3開源協(xié)議。 系統(tǒng)通過硬件抽象層屏蔽底層硬件差異,提供一致的編程接口。 傳感器驅(qū)動在后臺線程運行,主線程定期通過前端方法獲取最新數(shù)據(jù),確保實時性與效率。
四、核心算法原理深度解析
分層控制策略
APM采用經(jīng)典的兩級PID控制結(jié)構(gòu):
導(dǎo)航級(高級):處理GPS、氣壓計等數(shù)據(jù),計算期望的俯仰角、滾轉(zhuǎn)角和油門量控制級(低級):結(jié)合IMU反饋的實際姿態(tài),解算輸出給電機/舵機的控制量
傳感器融合技術(shù)
通過卡爾曼濾波器或互補濾波器融合多傳感器數(shù)據(jù):
傳感器類型 | 優(yōu)勢 | 局限性 |
|---|---|---|
陀螺儀 | 短期精度高 | 存在漂移 |
加速度計 | 測量重力方向 | 易受振動干擾 |
磁力計 | 提供絕對航向 | 易受電磁干擾 |
全球定位系統(tǒng) | 提供位置信息 | 更新頻率較低 |
姿態(tài)控制流程
以多旋翼為例,控制流程每次更新時(Pixhawk上400Hz,APM2.x上100Hz)執(zhí)行:
調(diào)用update_flight_mode()檢查并運行相應(yīng)飛行模式將用戶輸入轉(zhuǎn)換為傾斜角度、旋轉(zhuǎn)速率等中間指令通過AC_AttitudeControl庫進行姿態(tài)控制計算調(diào)用rate_controller_run()將結(jié)果傳遞到AP_Motors庫電機混合代碼將滾轉(zhuǎn)、俯仰、偏航值轉(zhuǎn)換為具體PWM輸出
五、功能特性與應(yīng)用場景全面分析
飛行模式體系
APM支持30余種飛行模式,滿足不同技能水平和應(yīng)用需求:
基礎(chǔ)模式:自穩(wěn)(Stabilize)、定高(AltHold)自主模式:自動(Auto)、返航(RTL)、跟隨(Follow)高級模式:定點(Loiter)、環(huán)繞(Circle)
任務(wù)規(guī)劃能力
支持多達1000個三維航點任務(wù),每個航點可設(shè)置高度、速度和執(zhí)行動作。通過完全可視化的任務(wù)規(guī)劃界面,用戶可輕松設(shè)計復(fù)雜航線,實現(xiàn)"起飛→巡航→執(zhí)行任務(wù)→降落"的全自動流程。
安全機制配置
低電量保護:設(shè)置多級閾值,觸發(fā)警報或自動返航故障檢測:通過傳感器數(shù)據(jù)沖突識別異常狀態(tài)信號丟失處理:遙控器信號中斷時自動觸發(fā)安全策略
六、生態(tài)系統(tǒng)與發(fā)展趨勢
APM飛控已從單純的飛行控制器發(fā)展為完整的無人系統(tǒng)開發(fā)平臺,支持平臺從空中擴展到水下和地面設(shè)備。與新興的PX4系統(tǒng)相比,APM固件因發(fā)展歷史更長,通常被認為更成熟穩(wěn)定,適合不求二次開發(fā)但求穩(wěn)定飛行的用戶。
-
無人機
+關(guān)注
關(guān)注
234文章
11114瀏覽量
192741 -
APM
+關(guān)注
關(guān)注
1文章
73瀏覽量
13727 -
飛行控制系統(tǒng)
+關(guān)注
關(guān)注
1文章
25瀏覽量
10639
發(fā)布評論請先 登錄
從DeepSeek到Qwen,AI大模型的移植與交互實戰(zhàn)指南-飛凌嵌入式






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論