") 無(wú)刷減速電機(jī)MCU控制方式與間隙要求
無(wú)刷減速電機(jī)MCU控制方式與間隙要求

無(wú)刷減速電機(jī)作為一種高效、低噪音、長(zhǎng)壽命的驅(qū)動(dòng)裝置,廣泛應(yīng)用于工業(yè)自動(dòng)化、機(jī)器人、醫(yī)療設(shè)備等領(lǐng)域。其核心控制依賴于微控制器單元(MCU),而機(jī)械傳動(dòng)中的間隙問(wèn)題直接影響系統(tǒng)精度和穩(wěn)定性。本文將深入探討無(wú)刷減速電機(jī)的MCU控制方式及其間隙要求,為工程師提供技術(shù)參考。

一、無(wú)刷減速電機(jī)的MCU控制方式
1. 基本控制原理
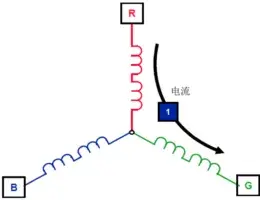
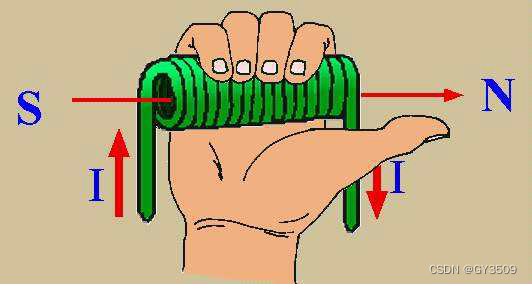
無(wú)刷電機(jī)通過(guò)電子換向替代傳統(tǒng)有刷電機(jī)的機(jī)械換向,MCU需要實(shí)時(shí)檢測(cè)轉(zhuǎn)子位置(通常通過(guò)霍爾傳感器或反電動(dòng)勢(shì)法),并控制三相逆變橋的開(kāi)關(guān)順序。減速機(jī)構(gòu)則通過(guò)齒輪組降低轉(zhuǎn)速、提高扭矩,兩者的協(xié)同控制是系統(tǒng)設(shè)計(jì)關(guān)鍵。
2. 主流控制算法
(1)方波控制(六步換向)
●實(shí)現(xiàn)簡(jiǎn)單,MCU資源占用少。
●依賴霍爾傳感器,存在轉(zhuǎn)矩脈動(dòng)。
●典型應(yīng)用:電動(dòng)工具、家用電器。
(2)正弦波控制(FOC矢量控制)
●采用Clarke/Park變換實(shí)現(xiàn)磁場(chǎng)定向。
●優(yōu)勢(shì):運(yùn)行平穩(wěn),效率提升5-15%。
●案例:某工業(yè)機(jī)器人關(guān)節(jié)電機(jī)采用STM32G4系列MCU實(shí)現(xiàn)50kHz FOC閉環(huán)。
(3)直接轉(zhuǎn)矩控制(DTC)
●省去坐標(biāo)變換環(huán)節(jié),動(dòng)態(tài)響應(yīng)快。
●需要高速ADC(1Msps以上)。
●適用于伺服驅(qū)動(dòng)等高性能場(chǎng)景。
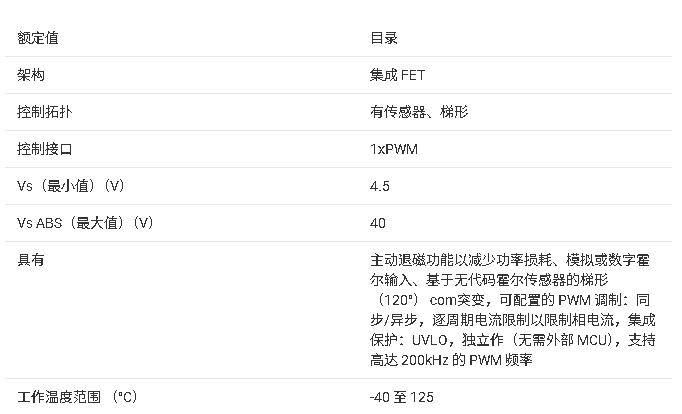
3. 關(guān)鍵MCU選型參數(shù)
●主頻:≥72MHz(FOC控制需求)。
●PWM分辨率:≥12bit(如STM32的HRTIM)。
●ADC采樣率:≥3Msps(多通道交錯(cuò)采樣)。
●硬件乘法器:加速Park逆變換計(jì)算。
●死區(qū)時(shí)間可調(diào):典型50-200ns。
二、減速機(jī)構(gòu)間隙的影響與控制
1. 間隙產(chǎn)生原因
(1)齒輪嚙合側(cè)隙
●漸開(kāi)線齒輪固有特性。
●制造公差(ISO 1328標(biāo)準(zhǔn))。
●長(zhǎng)期磨損(每1000小時(shí)約增加2-5μm)。
(2)軸承游隙
●C3組游隙常見(jiàn)于減速電機(jī)。
●溫升導(dǎo)致的膨脹差異。
(3)聯(lián)軸器間隙
●彈性聯(lián)軸器補(bǔ)償偏差但引入滯后。
2. 間隙量化指標(biāo)
●弧分表示法:1弧分≈0.0167°。
●線性回差:輸出端固定時(shí)輸入端可轉(zhuǎn)動(dòng)量。
●某品牌行星減速器樣本數(shù)據(jù):
精密級(jí):≤3弧分(諧波減速器可達(dá)≤1弧分)。
標(biāo)準(zhǔn)級(jí):5-8弧分。
3. 間隙補(bǔ)償技術(shù)
(1)機(jī)械預(yù)緊方案
●雙齒輪彈簧預(yù)緊結(jié)構(gòu)。
●交叉滾子軸承應(yīng)用。
●案例:某醫(yī)療CT設(shè)備采用預(yù)緊式行星減速箱,間隙控制在1.5弧分內(nèi)。
(2)電子補(bǔ)償算法
●雙編碼器反饋(電機(jī)端+負(fù)載端)。
●非線性PID控制(帶死區(qū)補(bǔ)償)。
●前饋補(bǔ)償模型:
```math
τ_comp = J·(θ_desired - θ_actual)/Δt + K_d·(ω_desired - ω_actual)
```
其中J為轉(zhuǎn)動(dòng)慣量,K_d為阻尼系數(shù)。
(3)智能控制策略
●基于LuGre模型的摩擦補(bǔ)償。
●神經(jīng)網(wǎng)絡(luò)預(yù)測(cè)控制(需DSP支持)。
●某半導(dǎo)體設(shè)備實(shí)測(cè)數(shù)據(jù):
| 控制方式 | 定位誤差(μm) | 穩(wěn)定時(shí)間(ms) |
| 常規(guī)PID | ±15 | 120 |
| 間隙補(bǔ)償PID | ±8 | 80 |
| 自適應(yīng)模糊控制 | ±5 | 50 |
三、系統(tǒng)集成注意事項(xiàng)
1. 機(jī)電參數(shù)匹配
●電機(jī)扭矩常數(shù)與減速比關(guān)系:
```math
T_out = T_motor × i × η
```
其中i為減速比,η為效率(通常85-95%)。
2. 熱管理要求
MCU結(jié)溫控制在85℃以下(工業(yè)級(jí))。
減速箱油溫不超過(guò)90℃。
建議布局:
●電機(jī)與減速箱直接法蘭連接。
●MCU控制板距離電機(jī)本體≥50mm。
●熱敏感元件避開(kāi)齒輪箱散熱面。
電機(jī)電纜雙絞線處理(節(jié)距≤50mm)。
PWM頻率選擇建議:
●8-16kHz(避免可聽(tīng)噪聲)。
●20kHz以上(降低鐵損)。
共模扼流圈選用:阻抗≥100Ω@1MHz。
四、典型應(yīng)用案例分析
1. 協(xié)作機(jī)器人關(guān)節(jié)模組
采用集成式設(shè)計(jì)(電機(jī)+諧波減速+編碼器)。
控制方案:
●主控:TI C2000 Delfino系列。
●通信:EtherCAT(同步周期≤1ms)。
●間隙補(bǔ)償:自適應(yīng)卡爾曼濾波。
性能指標(biāo):
●重復(fù)定位精度±0.02mm。
●反向間隙≤0.01°。
2. 自動(dòng)導(dǎo)引車(AGV)驅(qū)動(dòng)輪
輪轂電機(jī)+行星減速結(jié)構(gòu)。
特殊處理:
●防水型磁性編碼器(IP67)。
●防反沖蝸桿傳動(dòng)設(shè)計(jì)。
●CANopen通信協(xié)議。
3. 精密光學(xué)平臺(tái)調(diào)節(jié)機(jī)構(gòu)
微型減速電機(jī)(直徑28mm)。
關(guān)鍵技術(shù):
●壓電陶瓷微步補(bǔ)償。
●納米級(jí)光學(xué)編碼器反饋。
●空氣軸承支撐。
五、未來(lái)發(fā)展趨勢(shì)
1. 集成化控制方案
單芯片SOC集成MCU+柵極驅(qū)動(dòng)+電源管理。
2. 智能診斷技術(shù)
基于振動(dòng)分析的齒輪磨損預(yù)測(cè)。
電流紋波檢測(cè)軸承故障。
3. 新材料應(yīng)用
陶瓷齒輪(零潤(rùn)滑需求)。
碳纖維復(fù)合材料殼體(減重30%)。
4. 通信協(xié)議升級(jí)
TSN時(shí)間敏感網(wǎng)絡(luò)。
單對(duì)以太網(wǎng)(SPE)。
結(jié)語(yǔ):
無(wú)刷減速電機(jī)系統(tǒng)的性能優(yōu)化需要機(jī)電協(xié)同設(shè)計(jì)。在MCU控制方面,建議優(yōu)先選擇支持硬件加速FOC的32位處理器;對(duì)于間隙控制,精密應(yīng)用應(yīng)考慮諧波減速或采用雙編碼器閉環(huán)。隨著工業(yè)4.0發(fā)展,網(wǎng)絡(luò)化、智能化的無(wú)刷減速系統(tǒng)將成為主流,這對(duì)控制算法的實(shí)時(shí)性和機(jī)械精度提出了更高要求。工程師在具體設(shè)計(jì)時(shí),需根據(jù)動(dòng)態(tài)響應(yīng)、定位精度、成本預(yù)算等要素進(jìn)行多維權(quán)衡。
-
mcu
+關(guān)注
關(guān)注
147文章
19044瀏覽量
401725 -
減速電機(jī)
+關(guān)注
關(guān)注
1文章
304瀏覽量
11373
發(fā)布評(píng)論請(qǐng)先 登錄
無(wú)刷減速電機(jī)PCBA怎么選?合規(guī)適配與高效應(yīng)用全攻略
TC-BL3650驅(qū)動(dòng)板在無(wú)刷減速電機(jī)的應(yīng)用
?MCT8315Z 集成無(wú)刷直流電機(jī)驅(qū)動(dòng)器技術(shù)文檔總結(jié)
CW32電機(jī)控制基礎(chǔ)——無(wú)刷直流電機(jī)換相控制原理
無(wú)刷直流電機(jī)驅(qū)動(dòng)芯片的簡(jiǎn)單介紹
無(wú)刷減速電機(jī)如何確定定子槽數(shù)?
三相異步電機(jī)是有刷還是無(wú)刷

無(wú)刷直流電機(jī)無(wú)位置傳感器控制系統(tǒng)仿真研究
無(wú)刷直流電機(jī)雙閉環(huán)控制的仿真研究
無(wú)刷直流電機(jī)驅(qū)動(dòng)控制器的SOPC技術(shù)研究
無(wú)刷直流電機(jī)模糊自適應(yīng)PID控制的研究
無(wú)刷直流電機(jī)改進(jìn)型直接轉(zhuǎn)矩控制研究
無(wú)刷直流電機(jī)的控制研究
【電機(jī)】了解無(wú)刷直流電機(jī)BLDC
電機(jī):無(wú)刷直流電機(jī)的原理



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論