") 無(wú)感無(wú)刷電機(jī)啟動(dòng)的基本原理
無(wú)感無(wú)刷電機(jī)啟動(dòng)的基本原理

感無(wú)刷電機(jī)啟動(dòng)的最大挑戰(zhàn)在于電機(jī)靜止時(shí)反電動(dòng)勢(shì)為零,無(wú)法通過(guò)檢測(cè)反電動(dòng)勢(shì)來(lái)確定轉(zhuǎn)子位置。因此,必須采用特殊的啟動(dòng)方法,先通過(guò)外部控制將電機(jī)拉到一定轉(zhuǎn)速,使反電動(dòng)勢(shì)達(dá)到可檢測(cè)的水平,然后切換到基于反電動(dòng)勢(shì)的閉環(huán)控制。
三段式啟動(dòng)過(guò)程詳解
1. 轉(zhuǎn)子預(yù)定位階段
預(yù)定位是啟動(dòng)的第一步,目的是
確定轉(zhuǎn)子在靜止時(shí)的初始位置
。常用的方法包括:
兩相通電法:給任意兩相通電一段時(shí)間,在氣隙中形成恒定磁場(chǎng),將轉(zhuǎn)子強(qiáng)行定位到預(yù)定方向
電感檢測(cè)法:通過(guò)向電機(jī)注入電壓矢量,檢測(cè)繞組電感變化來(lái)確定轉(zhuǎn)子位置,這種方法可以避免電機(jī)反轉(zhuǎn)造成的機(jī)械損害
2. 啟動(dòng)加速階段
確定轉(zhuǎn)子初始位置后,進(jìn)入
外同步加速階段
。這個(gè)階段需要人為地給電機(jī)施加同步切換信號(hào),使電機(jī)逐步加速。主要有三種方法:
恒頻升壓法:保持換相信號(hào)頻率不變,逐步增大外施電壓
恒壓升頻法:保持外施電壓不變,逐漸增高換相信號(hào)頻率
升頻升壓法:同時(shí)增大外施電壓和換相頻率
3. 運(yùn)行狀態(tài)切換
當(dāng)電機(jī)加速到一定轉(zhuǎn)速(通常100r/min以上),反電動(dòng)勢(shì)足夠大時(shí),系統(tǒng)
切換到閉環(huán)控制狀態(tài)
。此時(shí)可以通過(guò)檢測(cè)反電動(dòng)勢(shì)的過(guò)零點(diǎn)來(lái)精確判斷轉(zhuǎn)子位置,實(shí)現(xiàn)穩(wěn)定的自控式運(yùn)行。
關(guān)鍵技術(shù)挑戰(zhàn)與解決方案
轉(zhuǎn)子位置檢測(cè)技術(shù)
反電動(dòng)勢(shì)法:通過(guò)檢測(cè)懸空相的反電動(dòng)勢(shì)過(guò)零點(diǎn)來(lái)確定轉(zhuǎn)子位置,但低速時(shí)效果不佳
電感檢測(cè)法:利用電機(jī)繞組電感隨轉(zhuǎn)子位置變化的特點(diǎn),通過(guò)注入檢測(cè)脈沖電壓來(lái)確定位置
啟動(dòng)失敗問(wèn)題及解決方案
無(wú)感無(wú)刷電機(jī)啟動(dòng)失敗可能由多種原因引起,包括:
電源問(wèn)題:電壓不穩(wěn)定或不足
控制器故障:參數(shù)設(shè)置錯(cuò)誤或硬件損壞
電機(jī)繞組問(wèn)題:短路、開路或絕緣損壞
負(fù)載過(guò)重:超出電機(jī)啟動(dòng)能力
技術(shù)發(fā)展趨勢(shì)
隨著電力電子技術(shù)的發(fā)展,無(wú)感無(wú)刷電機(jī)控制技術(shù)不斷進(jìn)步:
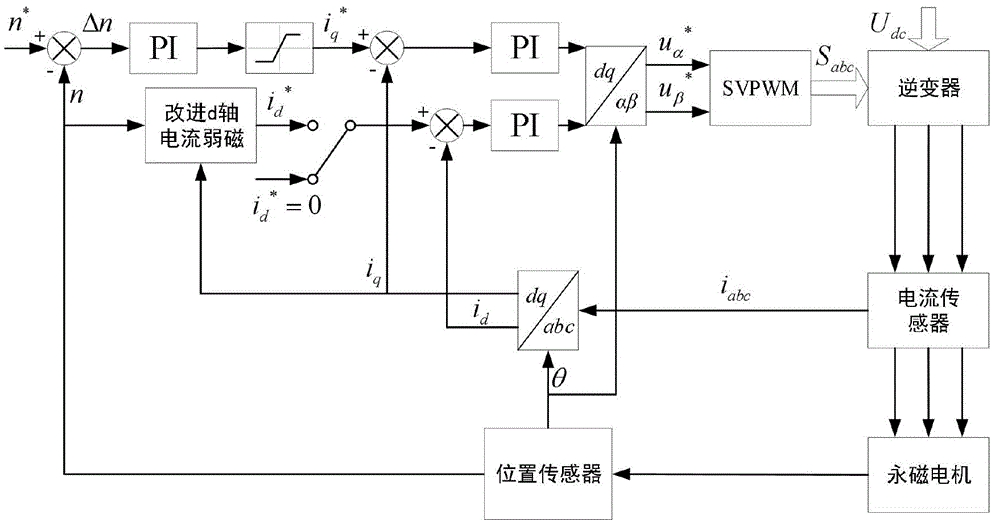
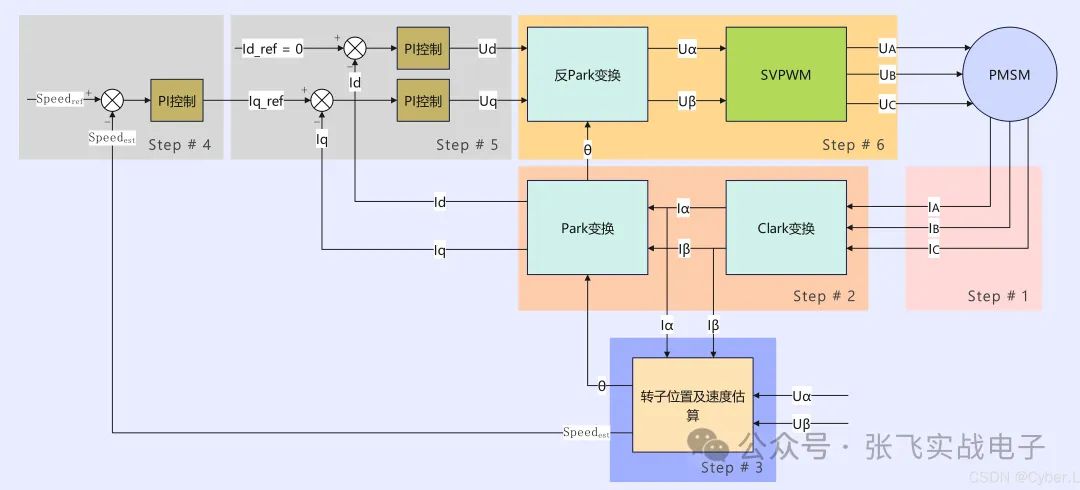
FOC(磁場(chǎng)定向控制):實(shí)現(xiàn)更平滑的啟動(dòng)和更精確的控制
智能算法:采用更先進(jìn)的算法提高啟動(dòng)成功率和穩(wěn)定性
集成化設(shè)計(jì):控制器與電機(jī)一體化設(shè)計(jì),提高系統(tǒng)可靠性
無(wú)感無(wú)刷電機(jī)的啟動(dòng)技術(shù)雖然復(fù)雜,但通過(guò)合理的控制策略和算法設(shè)計(jì),可以實(shí)現(xiàn)高效、可靠的啟動(dòng)性能,滿足各種應(yīng)用場(chǎng)景的需求。
審核編輯 黃宇
-
無(wú)刷電機(jī)
+關(guān)注
關(guān)注
60文章
982瀏覽量
49615
發(fā)布評(píng)論請(qǐng)先 登錄
虹科免拆案例 | 淺談無(wú)感BLDC啟動(dòng)控制方法

CW32F030C8T7永磁同步電機(jī)無(wú)感FOC控制的方案
基于CW32無(wú)刷直流空心杯電機(jī)無(wú)感方波控制驅(qū)動(dòng)方案
無(wú)感無(wú)刷電機(jī)的結(jié)構(gòu)——【其利天下】
有感/無(wú)感雙電阻 FOC 落地扇方案
無(wú)感FOC算法在電機(jī)啟動(dòng)時(shí)具體如何優(yōu)化性能?--【其利天下】

無(wú)刷電機(jī)弱磁控制:技術(shù)原理與實(shí)戰(zhàn)應(yīng)用
無(wú)感無(wú)刷電機(jī)基礎(chǔ)
基于雙極性PWM波的無(wú)感無(wú)刷電機(jī)驅(qū)動(dòng)方案
如何理解無(wú)刷電機(jī)中的六步換向?

本期小風(fēng)扇驅(qū)動(dòng)方案技術(shù)講解第三期將從控制算法上,解析無(wú)感方波算法與平滑啟動(dòng)算法#pcb設(shè)計(jì) #無(wú)刷電機(jī)
無(wú)刷電機(jī)的驅(qū)動(dòng)MOSFET

無(wú)刷電機(jī)詳解及其應(yīng)用
無(wú)刷電機(jī)FOC控制筆記
【電機(jī)控制】PMSM無(wú)感FOC控制



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論