") 德州儀器解析未來SDV內(nèi)幕:集成遠(yuǎn)程控制邊緣節(jié)點(diǎn)
德州儀器解析未來SDV內(nèi)幕:集成遠(yuǎn)程控制邊緣節(jié)點(diǎn)

簡介
汽車車載網(wǎng)絡(luò)不斷發(fā)展,以支持軟件定義車輛 (SDV) 中的新功能。隨著軟件整合到更少的電子控制單元 (ECU) 中,以增強(qiáng)車輛各個(gè)平臺的可擴(kuò)展性并簡化無線 (OTA) 更新,一種新穎的遠(yuǎn)程控制邊緣概念不僅優(yōu)化布線,而且支持可擴(kuò)展的邊緣節(jié)點(diǎn)軟件。邊緣節(jié)點(diǎn)是對特定功能進(jìn)行實(shí)時(shí)控制的專用 ECU,例如用于外部照明的前照燈模塊或用于門鎖、車窗和側(cè)后視鏡的控制模塊。這些節(jié)點(diǎn)在整個(gè)車載網(wǎng)絡(luò)中接收來自命令器 ECU(區(qū)域控制器,域控制器或中央計(jì)算)的命令。
邊緣節(jié)點(diǎn)對本地硬件控制進(jìn)行管理,它監(jiān)測溫度、壓力或位置傳感器以提供控制環(huán)路反饋,同時(shí)通過負(fù)載驅(qū)動(dòng)器(包括半橋以及高側(cè)和低側(cè)開關(guān))直接控制電機(jī)和電磁閥等機(jī)械執(zhí)行器。圖 1 展示了區(qū)域架構(gòu)中邊緣節(jié)點(diǎn)和命令器 ECU 之間的差異。
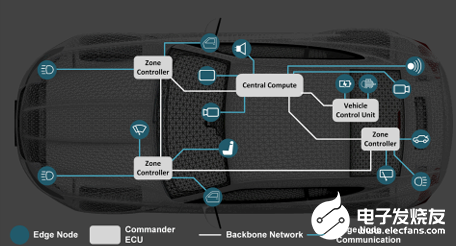
圖 1. 包括命令器 ECU 和多個(gè)邊緣節(jié)點(diǎn)的汽車區(qū)域架構(gòu)
遠(yuǎn)程控制邊緣架構(gòu)將實(shí)時(shí)控制和硬件抽象層 (HAL) 上行游轉(zhuǎn)移到命令器 ECU,后者為傳感器和負(fù)載驅(qū)動(dòng)器生成低級硬件命令并傳輸?shù)竭吘壒?jié)點(diǎn)。遠(yuǎn)程控制邊緣解決方案通過串行外設(shè)接口 (SPI)、內(nèi)部集成電路(I2C)、通用異步接收器/發(fā)送器 (UART) 和通用輸入/輸出 (GPIO) 等低級通信接口,在 ECU 之間橋接更高級別的網(wǎng)絡(luò)數(shù)據(jù)鏈路層,例如以太網(wǎng)或控制器局域網(wǎng) (CAN) 等。這種方法從邊緣節(jié)點(diǎn)中完全移除了微控制器(MCU) 和所有軟件。
遠(yuǎn)程控制邊緣方案支持有關(guān) SDV 的重大趨勢,并通過將軟件集中在命令器 ECU 中同時(shí)使邊緣節(jié)點(diǎn)中依賴于負(fù)載的硬件靠近機(jī)電執(zhí)行器來減少線束數(shù)量。
傳統(tǒng)邊緣節(jié)點(diǎn)與遠(yuǎn)程控制邊緣節(jié)點(diǎn)的對比
圖 2 顯示了傳統(tǒng)邊緣節(jié)點(diǎn)的方框圖。在傳統(tǒng)架構(gòu)中,本地 MCU 包含 HAL,HAL 是定義器件軟件驅(qū)動(dòng)程序如何與硬件交互的軟件。邊緣 MCU 通過網(wǎng)絡(luò)接口(通常是 CAN 靈活數(shù)據(jù)速率 (CAN FD) 本地互連網(wǎng)絡(luò))接收來自控制器 MCU 的命令,并根據(jù)控制器發(fā)出的指令控制本地硬件。
例如,如果上游控制器 MCU 向邊緣 MCU 節(jié)點(diǎn)發(fā)送命令“升起駕駛員側(cè)車窗”,則邊緣 MCU 會(huì)將該消息轉(zhuǎn)換為特定的硬件操作,包括升起車窗、執(zhí)行車窗軟關(guān)閉以及防止可能發(fā)生的電機(jī)失速或車窗夾手事件。邊緣節(jié)點(diǎn) MCU 將必要的 SPI 消息傳送到電機(jī)驅(qū)動(dòng)器,并通過發(fā)送到半橋電機(jī)驅(qū)動(dòng)器的脈寬調(diào)制(PWM) 輸出實(shí)施窗口電機(jī)的實(shí)時(shí)控制環(huán)路,同時(shí)使用集成式模數(shù)轉(zhuǎn)換器(ADC) 監(jiān)控電機(jī)電流并對霍爾效應(yīng)脈沖計(jì)數(shù)以進(jìn)行窗口位置跟蹤。
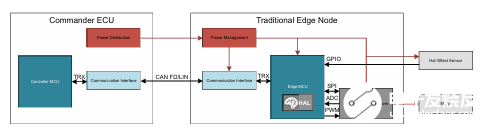
圖 2. 與命令器 ECU 進(jìn)行通信的傳統(tǒng)邊緣節(jié)點(diǎn)方框圖
圖 3 展示了遠(yuǎn)程控制邊緣節(jié)點(diǎn)方框圖。這種架構(gòu)將 HAL 和實(shí)時(shí)執(zhí)行器上行移入命令器 ECU 的 MCU 中,完全消除了邊緣節(jié)點(diǎn) MCU。控制器 MCU 現(xiàn)在可以發(fā)送包括器件通信協(xié)議幀或外設(shè)控制(SPI、I2C、UART、PWM 輸出控制、ADC 采樣或 GPIO)的命令。
對于車窗升降應(yīng)用,控制器通過網(wǎng)絡(luò)發(fā)送嵌入到標(biāo)準(zhǔn)通信協(xié)議數(shù)據(jù)有效載荷(CAN FD Light 或 10BASE-T1S)中的直接控制數(shù)據(jù)(SPI 電機(jī)驅(qū)動(dòng)器命令和 PWM 輸出設(shè)置)。邊緣節(jié)點(diǎn)中的通信橋接器提取這些協(xié)議數(shù)據(jù)有效載荷并在相應(yīng)的 GPIO引腳上輸出 SPI 幀和 PWM 信號。對于傳感器反饋,該橋接器對內(nèi)部或外部 ADC 和霍爾效應(yīng)傳感器數(shù)據(jù)進(jìn)行采樣并將數(shù)據(jù)發(fā)送回命令 ECU 以完成控制環(huán)路。
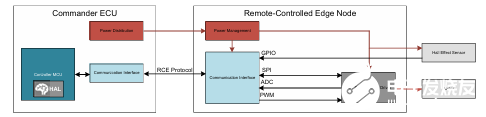
圖 3. 與命令器 ECU 進(jìn)行通信的遠(yuǎn)程控制邊緣節(jié)點(diǎn)方框圖
遠(yuǎn)程控制邊緣節(jié)點(diǎn)的優(yōu)勢
遠(yuǎn)程控制邊緣架構(gòu)具有多種優(yōu)勢,包括實(shí)現(xiàn)軟件集中化、降低軟件開發(fā)成本、支持可擴(kuò)展性和簡化 OTA 更新。此外,使用遠(yuǎn)程控制邊緣節(jié)點(diǎn)可以實(shí)現(xiàn)從命令器 ECU 進(jìn)行負(fù)載驅(qū)動(dòng)器控制,同時(shí)最大限度減少負(fù)載接線。
遠(yuǎn)程控制邊緣節(jié)點(diǎn)可通過軟件集中化降低系統(tǒng)成本。通過移除邊緣微控制器并將軟件集中到更少的 ECU 中,公司可以減少軟件開發(fā)工作量和管理開銷,減少整個(gè)車輛中多個(gè) ECU 的測試和驗(yàn)證要求。
軟件集中化還提高了可擴(kuò)展性。開發(fā)人員可以僅為上游命令器 ECU 創(chuàng)建軟件,同時(shí)實(shí)現(xiàn)邊緣節(jié)點(diǎn)中硬件的標(biāo)準(zhǔn)化。這種標(biāo)準(zhǔn)化簡化了多個(gè)節(jié)點(diǎn)和 ECU 間的車輛基礎(chǔ)設(shè)施,而無需使用專用邊緣硬件。
圖 4 將傳統(tǒng)方法(每個(gè)邊緣節(jié)點(diǎn)模塊使用不同供應(yīng)商提供的不同 MCU,需要跨多個(gè)平臺進(jìn)行軟件開發(fā)和管理)與遠(yuǎn)程控制邊緣方法(圖 4 中的標(biāo)簽“RCE 解決方案 A、B 或 C”代表多個(gè)供應(yīng)商提供的無軟件選項(xiàng))進(jìn)行了對比。基于標(biāo)準(zhǔn)的解決方案具有額外的優(yōu)勢,因?yàn)闊o論是哪家遠(yuǎn)程控制邊緣解決方案供應(yīng)商,命令器 ECU 的軟件都保持一致。
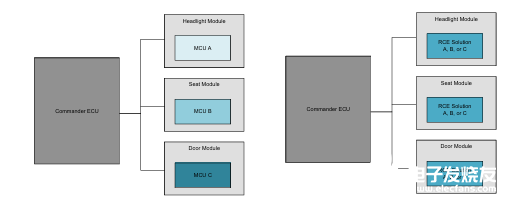
圖 4. 遠(yuǎn)程控制邊緣節(jié)點(diǎn)與傳統(tǒng)邊緣節(jié)點(diǎn)的硬件可擴(kuò)展性
實(shí)現(xiàn)控制集中化讓汽車制造商能夠簡化軟件管理和 OTA 更新,使他們更容易擁有和管理自己的軟件。發(fā)布 OTA 更新只需要更新命令器 ECU,不需要更新多個(gè)模塊的軟件。
使用邊緣節(jié)點(diǎn)而不是直接從命令器 ECU 驅(qū)動(dòng)負(fù)載,縮短了連接負(fù)載驅(qū)動(dòng)器的電線長度。遠(yuǎn)程控制邊緣節(jié)點(diǎn)保持這一優(yōu)勢,同時(shí)還將 HAL 保留在命令器 ECU 中。圖 5 以車門為例展示了區(qū)域架構(gòu)中的這種配置。盡管區(qū)域控制器控制兩個(gè)車門模塊,但車門邊緣模塊縮短了負(fù)載布線,這也有助于通過盡量減少寄生電容和電感來減少電磁干擾,對于需要更快開關(guān)時(shí)間的下一代 48V 車輛,這一點(diǎn)尤其重要。
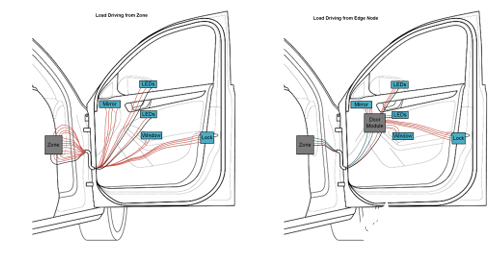
圖 5. 與傳統(tǒng)邊緣節(jié)點(diǎn)相比,遠(yuǎn)程控制邊緣節(jié)點(diǎn)的電纜減少
遠(yuǎn)程控制邊緣節(jié)點(diǎn)注意事項(xiàng)
從事遠(yuǎn)程控制邊緣技術(shù)研究的原始設(shè)備制造商 (OEM) 和設(shè)計(jì)人員必須考慮延遲、功能安全、網(wǎng)絡(luò)安全和成本。
延遲是一項(xiàng)重大設(shè)計(jì)挑戰(zhàn)。來自邊緣的數(shù)據(jù)必須上行,在上游進(jìn)行決策并由邊緣處理,然后下行返回邊緣進(jìn)行實(shí)施,這會(huì)增加實(shí)時(shí)控制環(huán)路的延遲。圖 6 展示了這種負(fù)載檢測和控制過程。傳統(tǒng)邊緣節(jié)點(diǎn)只需要完成第 2 步和第 5 步,而遠(yuǎn)程控制邊緣解決方案實(shí)現(xiàn)了智能操作或自主輪詢等功能來減少延遲。智能操作允許橋接器件自動(dòng)傳送傳感器數(shù)據(jù),而無需命令器 ECU 初始提示,從而省略了第 1 步。自主輪詢使橋接器件能夠自動(dòng)對傳感器采樣并將讀數(shù)存儲(chǔ)到緩沖器。因此,可以在其他步驟期間執(zhí)行第 2 步,這有助于進(jìn)一步減少延遲。
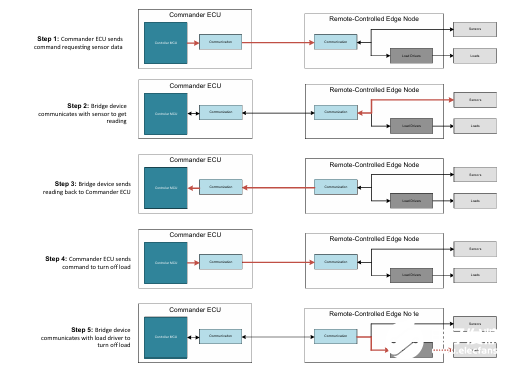
圖 6. 增加延遲的遠(yuǎn)程控制邊緣節(jié)點(diǎn)的通信步驟
由于不再有本地實(shí)時(shí)控制,因此可能會(huì)出現(xiàn)功能安全問題。有著嚴(yán)格要求(例如容錯(cuò)時(shí)間間隔規(guī)范中的嚴(yán)格延遲要求)的邊緣應(yīng)用可能難以處理上游通信延遲。作為一項(xiàng)較新穎的技術(shù),第一代遠(yuǎn)程控制邊緣器件可能無法滿足汽車安全完整性等級要求,或者可能需要采取額外措施來實(shí)現(xiàn)系統(tǒng)級的功能安全。
隨著車輛越來越依賴軟件,網(wǎng)絡(luò)安全風(fēng)險(xiǎn)也隨之增加。如果不采取適當(dāng)?shù)陌踩胧?a target="_blank">黑客就能夠訪問車載網(wǎng)絡(luò)并控制全車的功能,這可能會(huì)帶來盜竊和安全風(fēng)險(xiǎn)。由于在遠(yuǎn)程控制邊緣節(jié)點(diǎn)沒有 MCU 在本地管理安全,因此在遠(yuǎn)程控制邊緣節(jié)點(diǎn)上實(shí)現(xiàn)網(wǎng)絡(luò)安全更為困難,因此 OEM 務(wù)必要選擇滿足其網(wǎng)絡(luò)安全需求的解決方案。
成本考慮因素必須平衡硬件和軟件費(fèi)用。將目前在傳統(tǒng)邊緣節(jié)點(diǎn)中使用的低級 MCU 替換為遠(yuǎn)程控制邊緣節(jié)點(diǎn)器件可能更加昂貴。但是,請務(wù)必記住,即使硬件成本增加,軟件開發(fā)和管理成本仍將大幅節(jié)省。
遠(yuǎn)程控制邊緣讓汽車制造商能夠在內(nèi)部管理更多軟件,OEM 需要對一些折中進(jìn)行評估。
遠(yuǎn)程控制邊緣應(yīng)用
遠(yuǎn)程控制邊緣技術(shù)在照明、電池管理系統(tǒng)(BMS)、高級駕駛輔助系統(tǒng)(ADAS)、汽車門禁和車身電機(jī)等眾多應(yīng)用中提供價(jià)值。表 1 列出了這些應(yīng)用和遠(yuǎn)程控制邊緣節(jié)點(diǎn)的優(yōu)勢。
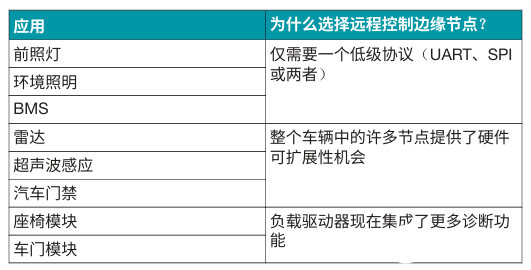
表 1. 各種遠(yuǎn)程控制邊緣節(jié)點(diǎn)應(yīng)用以及它們?yōu)槭裁捶浅_m合
遠(yuǎn)程控制邊緣協(xié)議
遠(yuǎn)程控制協(xié)議解決方案包括 10BASE-T1S、CAN FD Light 和 UART over CAN。這些協(xié)議以半雙工模式運(yùn)行,允許兩個(gè)器件之間進(jìn)行非同步雙向數(shù)據(jù)傳輸。半雙工支持多點(diǎn)功能,即兩個(gè)以上器件在同一條總線上通信,只需要命令器 ECU 中的一個(gè)網(wǎng)絡(luò)器件與多個(gè)邊緣節(jié)點(diǎn)交互。圖 7 展示了一個(gè)多點(diǎn)拓?fù)涫纠?/p>
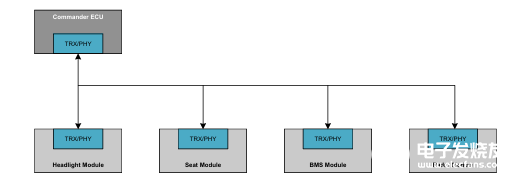
圖 7. 命令器 ECU 與邊緣節(jié)點(diǎn)之間的多點(diǎn)拓?fù)?/p>
10BASE-T1S、CAN FD Light 和 UART over CAN 在速度、有效載荷容量以及多點(diǎn)和總線拓?fù)渲械墓?jié)點(diǎn)數(shù)量方面存在差異同。表 2 對這些協(xié)議進(jìn)行了比較。
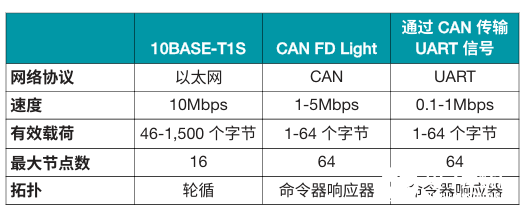
表 2. 10BASE-T1S、CAN FD Light 和 UART over CAN 遠(yuǎn)程控制邊緣網(wǎng)絡(luò)協(xié)議間的比較
圖 8 展示了輪循拓?fù)浜兔钇?響應(yīng)器拓?fù)渲g的差異。輪詢拓?fù)溲h(huán)運(yùn)行,在每一周期,每個(gè)節(jié)點(diǎn)根據(jù)其節(jié)點(diǎn) ID 有一個(gè)專屬傳輸機(jī)會(huì)。這樣,仲裁將自動(dòng)進(jìn)行,但需要進(jìn)行調(diào)解以確保優(yōu)先級或時(shí)間關(guān)鍵型數(shù)據(jù)不會(huì)因總線上的低優(yōu)先級數(shù)據(jù)而延遲。命令器/響應(yīng)器拓?fù)湟竺钇?ECU 在總線上發(fā)送數(shù)據(jù)之前提示下游節(jié)點(diǎn)。傳輸順序由命令器 ECU 而不是由節(jié)點(diǎn) ID 決定。
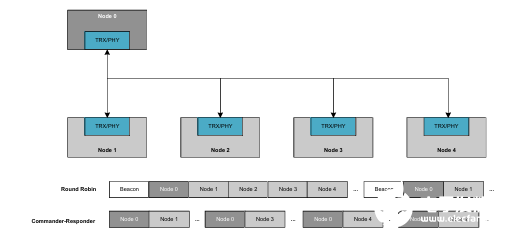
圖 8. 輪循拓?fù)渑c命令器/響應(yīng)器者拓?fù)涞膫鬏敱容^
10BASE-T1S 由電氣電子工程師協(xié)會(huì) (IEEE) 802.3cg 實(shí)現(xiàn)標(biāo)準(zhǔn)化,它使用由技術(shù)委員會(huì) 18 制訂標(biāo)準(zhǔn)的遠(yuǎn)程控制協(xié)議。其工作速率為 10Mbps 并采用輪詢多點(diǎn)拓?fù)洹W鳛橐蕴W(wǎng)協(xié)議,10BASE-T1S 可以集成以太網(wǎng)功能,例如媒體訪問控制安全 (MACSec)、時(shí)間敏感網(wǎng)絡(luò) (TSN)、音頻視頻橋接 (AVB) 和數(shù)據(jù)線供電 (PoDL)。表 3 介紹描述了這四個(gè)功能。此外,已經(jīng)使用高速以太網(wǎng)主干網(wǎng)的系統(tǒng)可以在整個(gè)以太網(wǎng)網(wǎng)絡(luò)受益于精簡的軟件。
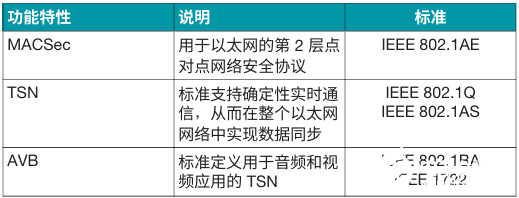

表 3. 列出和說明 10BASE-T1S 以太網(wǎng)功能和標(biāo)準(zhǔn)
CAN FD Light 是基于國際標(biāo)準(zhǔn)化組織 (ISO) 11898-1:2024 標(biāo)準(zhǔn)的 CAN FD 的一個(gè)版本,工作速率為 1Mbps 至 5Mbps。與遵循 CAN 仲裁(節(jié)點(diǎn)同時(shí)傳輸,節(jié)點(diǎn) ID 最小的節(jié)點(diǎn)勝出)的傳統(tǒng) CAN 不同,CAN FD Light 采用命令器/響應(yīng)器者拓?fù)溥\(yùn)行。邊緣節(jié)點(diǎn)使用 CAN FD Light 響應(yīng)器,命令器 ECU 使用 CAN FD Light 命令器或 CAN FD收發(fā)器。由于許多現(xiàn)有架構(gòu)已經(jīng)使用 CAN FD 收發(fā)器與邊緣節(jié)點(diǎn)通信,因此可以輕松地將 CAN FD Light 集成到當(dāng)前架構(gòu)。然而,考慮到控制器仲裁階段的限制,實(shí)現(xiàn) >1Mbps 的速度需要使用 CAN FD Light 命令器。
10BASE-T1S 和 CAN FD Light 協(xié)議將以太網(wǎng)和 CAN 橋接至 SPI、I2C、UART、GPIO 和 PWM 等其他協(xié)議(請參閱圖 9)。這種橋接可通過 10BASE-T1S 和 CAN FD Light 實(shí)現(xiàn)多個(gè)傳感器和驅(qū)動(dòng)器的遠(yuǎn)程控制,使這兩種解決方案可在各種終端應(yīng)用中通用。
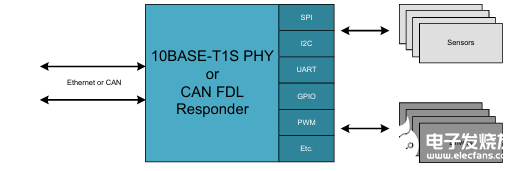
圖 9. 10BASE-T1S 或 CAN FD Light 邊緣節(jié)點(diǎn)的方框圖
UART over CAN 使用 CAN 收發(fā)器通過 CAN物理層(PHY) 傳輸 UART 數(shù)據(jù)包(請參閱圖 10)。在命令器/響應(yīng)器拓?fù)渲校琔ART over CAN 的工作速率 ≤1Mbps,它提供了一種具有成本效益的解決方案,但依賴于基于 UART 的驅(qū)動(dòng)器(例如 LED)或具有集成實(shí)時(shí)控制和診斷功能的電機(jī)驅(qū)動(dòng)器。

圖 10. UART over CAN 邊緣節(jié)點(diǎn)的方框圖
具有集成實(shí)時(shí)控制的智能驅(qū)動(dòng)器補(bǔ)充完善了遠(yuǎn)程控制邊緣解決方案,它減少了上游控制要求。德州儀器(TI) 為無傳感器電機(jī)系統(tǒng)提供具有集成控制的智能電機(jī)驅(qū)動(dòng)器,包括用于無刷直流 (BLDC) 電機(jī)驅(qū)動(dòng)器的無傳感器磁場定向控制以及用于步進(jìn)電機(jī)驅(qū)動(dòng)器的集成電流檢測和失速檢測。步進(jìn)電機(jī)由于旋轉(zhuǎn)精度更高,特別適合遠(yuǎn)程控制邊緣應(yīng)用,因?yàn)樗鼈冃枰俚纳嫌卧\斷數(shù)據(jù)。表 4 列出了一些 TI 器件。

表 4. TI 的電機(jī)驅(qū)動(dòng)器產(chǎn)品
遠(yuǎn)程控制邊緣系統(tǒng)解決方案
圖 11 展示了使用 10BASE-T1S 或 CAN FD Light 的前照燈遠(yuǎn)程控制邊緣節(jié)點(diǎn)。PHY 或響應(yīng)器將以太網(wǎng)或 CAN FD Light 消息轉(zhuǎn)換為各種本地協(xié)議,控制溫度傳感器、LED 驅(qū)動(dòng)器、電機(jī)驅(qū)動(dòng)器和高側(cè)開關(guān)。命令器 ECU 向 PHY 或響應(yīng)器提供命令,以通過 UART、SPI、GPIO 或其他協(xié)議啟用負(fù)載驅(qū)動(dòng)器,從而打開和關(guān)閉執(zhí)行器。然后,PHY 或響應(yīng)器上行發(fā)送傳感器數(shù)據(jù)和執(zhí)行器反饋到命令器 ECU。
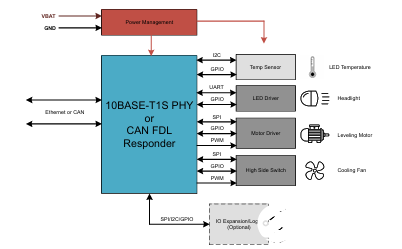
圖 11. 使用 10BASE-T1S 或 CAN FD Light 的遠(yuǎn)程控制前照燈模塊方框圖
利用具有集成步進(jìn)電機(jī)梯形控制功能的 TPS92544-Q1 開關(guān) LED 驅(qū)動(dòng)器和 DRV8434A-Q1 步進(jìn)電機(jī)驅(qū)動(dòng)器,TI 提供了采用 UART over CAN 協(xié)議的遠(yuǎn)程控制邊緣前照燈解決方案。TPS92544-Q1 通過單個(gè) UART 接口控制 LED 和電機(jī),使其成為高效的前照燈模塊解決方案。如圖 12 所示,CAN 收發(fā)器用作來自命令器 ECU 的 UART 數(shù)據(jù)包的硬件介質(zhì)。
這些 UART 數(shù)據(jù)包控制 TPS92544-Q1 以啟用前照燈,并驅(qū)動(dòng) DRV8434A-Q1 器件對調(diào)平電機(jī)進(jìn)行步進(jìn)電機(jī)運(yùn)動(dòng)控制。
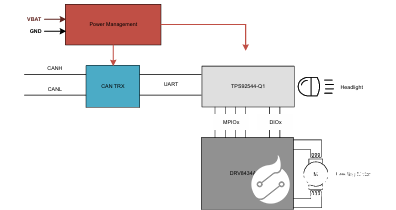
圖 12. 使用 TPS92544-Q1 和 UART over CAN 的遠(yuǎn)程控制前照燈模塊方框圖
結(jié)語
隨著汽車市場接受在區(qū)域架構(gòu)上進(jìn)行 SDV 和 ECU 整合,軟件集中化的推動(dòng)力將進(jìn)一步增強(qiáng),從而實(shí)現(xiàn)可擴(kuò)展性并減少電線數(shù)量。遠(yuǎn)程控制邊緣節(jié)點(diǎn)通過將軟件上行游移動(dòng)并整合到更少的 ECU 中以及簡化 OTA 更新為這一舉措提供支持。
10BASE-T1S、CAN FD Light 和 UART over CAN 等多種解決方案可為系統(tǒng)架構(gòu)師提供滿足其具體設(shè)計(jì)需求的選項(xiàng)。此外,具有集成診斷和控制功能的智能驅(qū)動(dòng)器可進(jìn)一步優(yōu)化遠(yuǎn)程控制邊緣實(shí)現(xiàn)。
關(guān)于德州儀器
德州儀器(TI)(納斯達(dá)克股票代碼:TXN)是一家全球性的半導(dǎo)體公司,從事設(shè)計(jì)、制造和銷售模擬和嵌入式處理芯片,用于工業(yè)、汽車、個(gè)人電子產(chǎn)品、企業(yè)系統(tǒng)和通信設(shè)備等市場。我們致力于通過半導(dǎo)體技術(shù)讓電子產(chǎn)品更經(jīng)濟(jì)實(shí)用,讓世界更美好。如今,每一代創(chuàng)新都建立在上一代創(chuàng)新的基礎(chǔ)上,使我們的技術(shù)變得更可靠、更經(jīng)濟(jì)、更節(jié)能,從而實(shí)現(xiàn)半導(dǎo)體在電子產(chǎn)品領(lǐng)域的廣泛應(yīng)用。
-
德州儀器
+關(guān)注
關(guān)注
123文章
1991瀏覽量
145211 -
車載網(wǎng)絡(luò)
+關(guān)注
關(guān)注
6文章
180瀏覽量
33162 -
遠(yuǎn)程控制
+關(guān)注
關(guān)注
4文章
729瀏覽量
37147 -
ecu
+關(guān)注
關(guān)注
14文章
988瀏覽量
57353 -
SDV
+關(guān)注
關(guān)注
0文章
97瀏覽量
7574
發(fā)布評論請先 登錄



 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論