 LuatOS AGPS 輔助定位開發實戰教程
LuatOS AGPS 輔助定位開發實戰教程

為解決傳統 GPS 定位慢、功耗高的痛點,AGPS 技術通過輔助數據注入提升效率。本教程以 LuatOS 開發環境為基礎,循序漸進地講解 AGPS 輔助定位的開發流程,包括 AGPS 服務器對接、數據解析、定位模塊調優等實戰環節,附帶完整代碼與調試技巧,助開發者快速上手。
一、AGPS 概述
AGPS(Assisted GPS,輔助全球衛星定位系統)通過移動網絡預先獲取衛星星歷、時間等輔助數據,可大幅縮短 GPS 首次定位時間。LuatOS 提供 AGPS 原生支持,適用于物流追蹤、車載定位等場景。
1.1 GPS、WiFi、基站、AGPS 幾種常用定位原理介紹與區別
GPS
GPS(Global Positioning System)即全球定位系統,它是由美國研究的一種定位方式,特點是:不需要 SIM 卡,不需要連接網絡,只要在戶外,基本上就能隨時隨地的準確定位。但是 GPS 啟動后搜索衛星的時間比較多,一般需要2分鐘左右(俗稱冷啟動) 冷啟動包括: 1.GPS 初次使用 2.GPS 電池耗盡 3.關機狀態下移動 1000 公里以上的距離或持續關機超過 4 小時。
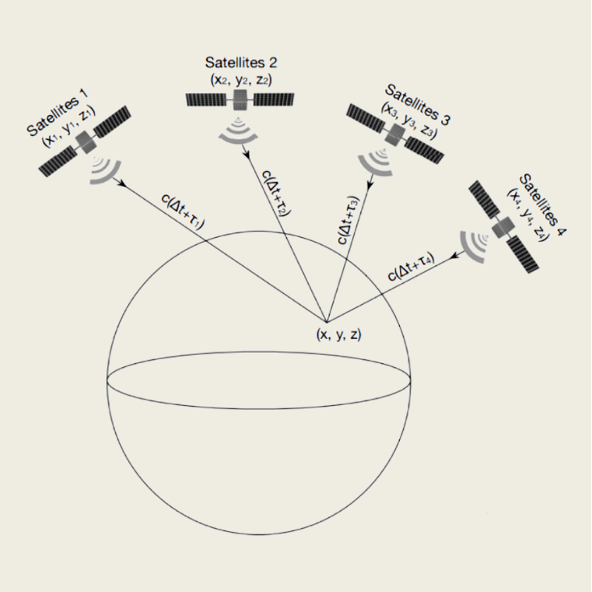
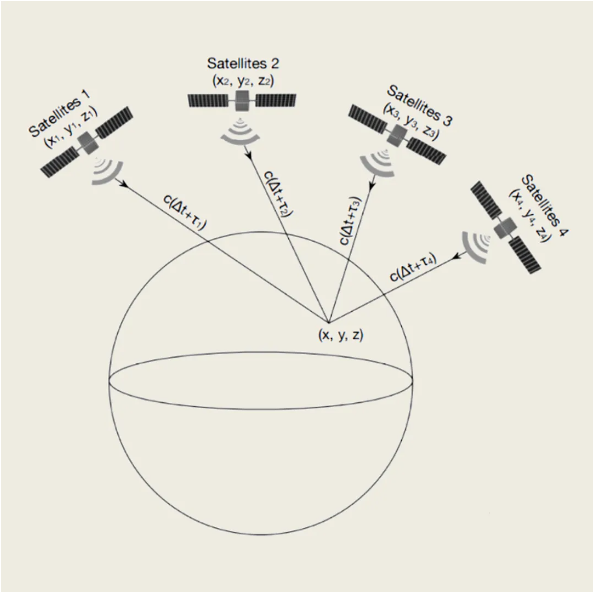
原理:接收機接收 GPS 衛星廣播,通過解析可見 GPS 衛星的位置、距離等信息以及相應算法得出自己的位置信息。
優勢:定位精度高,只要能接收到四顆衛星的定位信號,就可以進行定位。 缺點:GPS 受天氣和位置的影響較大。當遇到天氣不佳的時候、或者處于高架橋/樹蔭的下面,或者在高樓的旁邊角落、地下車庫、室內或露天的下層車庫(或者簡單地說當見不到天空的時候),GPS 的定位就會受到相當大的影響,甚至無法進行定位服務。
注意:各國定位系統有:中國北斗、美國 GPS、俄羅斯 GLONASS、歐洲伽利略等,統稱衛星定位。
gps 模組定位精度:3~5 米
LBS(基站)定位
基站包括移動、聯通和電信基站。基站定位是通過移動通信的基站信號差異,通過一定的算法來計算出手機所在的位置,取決于定位地點附近所處的基站覆蓋密度,如果基站多,定位則準確,如果是山區,基站少,則定位就不那么精確;LBS 定位必須聯網,手機處于 SIM 卡注冊狀態(飛行模式下開 wifi 和拔出 SIM 卡都不行)。
原理:運營商蜂窩基站的位置信息都是固定的,通過接收一個或多個基站信號終端,再根據信號強度及基站位置進行推算自身位置
優點:方便,因為它是通過 SIM 卡接收基站信號進行定位的。理論上說,只要計算三個基站的信號差異,就可以判斷出手機所在的位置。因此,只要用戶手機處于移動通信網絡的有效范圍之內,就可以隨時進行位置定位,而不受天氣、高樓、位置等等的影響。
缺點:通過計算基站信號差異而得出的位置坐標值,很明顯地遜于 GPS 的定位精度,受環境影響較大,在郊區和農村可以將移動臺定位在 10~20 米范圍內,在城區由于高大建筑物較多,電波傳播環境不好,信號很難直接從基站到達移動臺,一般要經過折射或反射,因此定位精度會受到影響;其次是使用范圍較窄,LBS 雖然不會受到天氣、高架橋或高樓的影響,但如果超出手機的服務范圍,或者手機所處的基站數量不足,則無法進行 LBS 定位,從這一點上說不太適合野外使用。
定位精度:10-2000 米。
WIFI 定位
Wifi 定位,顧名思義,周圍必須有 wifi 才可以!WiFi 定位的目的是解決室內精確定位,原理類似基站定位。WiFi 定位的條件是:1、必須具有 WIFISCAN 功能,可以掃描到周圍 wifi 的 mac 地址。2、必須能上網,移動數據或者 wifi 聯網皆可。
原理:
每一個無線 AP 都有一個全球唯一的 MAC 地址, WiFi 定位靠的是偵測附近周圍所有的無線網絡基地臺 (WiFi Access Point) 的 MAC 地址,去比對數據庫中該 MAC 地址的坐標,交叉計算出所在地。
優點:
1.定位精度高,wifi 密集人流多的地方相當精確;
2.速度快;
3.周圍的 wifi 即使連接不上也能定位。在不依賴外部設備的情況下,沒有比 WIFI 定位更精準的室內定位方式,室內定位不精準,偏二三十米遠,這個問題當前科技無解。
缺點:
1.依賴wifiscan! 沒有 wifiscan 就不能定位;
2.必須處于聯網狀態。
3.用戶被迫共享了一點流量
精確度:10~200 米
AGPS 輔助定位
AGPS 是輔助 GPS 定位的一種方法。AGPS 和 GPS 是一樣的,只是加上網絡的輔助而已,定位時,必須有 GPS 模塊存在,如果沒有 GPS 模塊,這種定位是不起什么作用的。A-GPS 定位是用來加快定位速度的,由于 GPS 冷啟動時,搜星速度很慢(需要把頭上二十多顆衛星挨個搜一遍),大約 2 分鐘才能搜到,合宙定位模組冷啟動 35s 左右就可以定上位。增加了 AGPS 定位之后可以利用基站大體定位下你所在的位置,然后通過網絡將這個位置發送到服務器,服務器根據這個位置將此時經過你頭頂的衛星參數(哪幾顆、頻率、位置、仰角等信息)反饋給你的定位設備,設備上的 GPS 就可以很有目的的去搜索衛星,此時你的搜星速度大大提高,幾秒鐘就可以定位。
原理:
接收機接收 GPS 星歷文件,通過解析可見 GPS 衛星的位置、距離等信息以及相應算法得出自己的位置信息。
和 GPS 相比比優勢:
1.搜星定位快,不管是冷啟動還是熱啟動都秒定
2.有效減少設備的電量消耗
3.緩解弱 GPS 信號情況下無法定位或精度降低的問題
4.對移動設備的計算能力要求更低。
缺點:
1.必須聯網,如果你的設備不能上網,或是停機了身邊又沒有 wifi,是沒法應用 AGPS 達到秒定效果的。
2.必須有 AGPS 位置服務器的支持 3.與 GPS 一樣,仍無法完美解決室內(室內無法接收 GPS 信號)定位的問題。
精確度:3~5 米
二、演示功能概述
本教程將演示如何使用 Air8000 的 GPS 功能,使用 agps 實現快速定位功能。agps 實現流程圖如下:
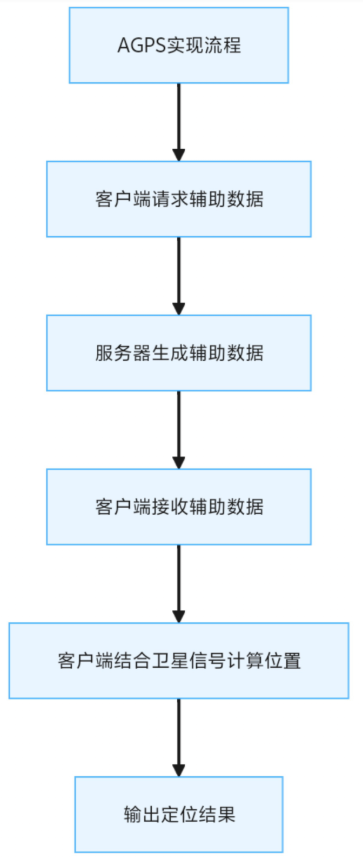
Air8000 的 AGPS 實現原理為:通過蜂窩基站或 Wi-Fi 定位獲取粗略位置坐標,再結合網絡下發的衛星輔助數據(星歷),顯著縮短衛星信號搜索時間并加速定位解算,最終實現快速精準定位。
注意:GPS 星歷文件能保持 4 小時,定位成功后會自動更新星歷。
由上面原理可知 Air8000 使用 agps 功能需要訪問兩個服務器,基站定位服務器和星歷下載服務器。(注意:如果使用的是專網卡,需要將下面兩個服務器配置在 sim 卡的白名單中,基站定位服務器和[星歷下載服務器] (download.openluat.com)。)
三、準備硬件環境
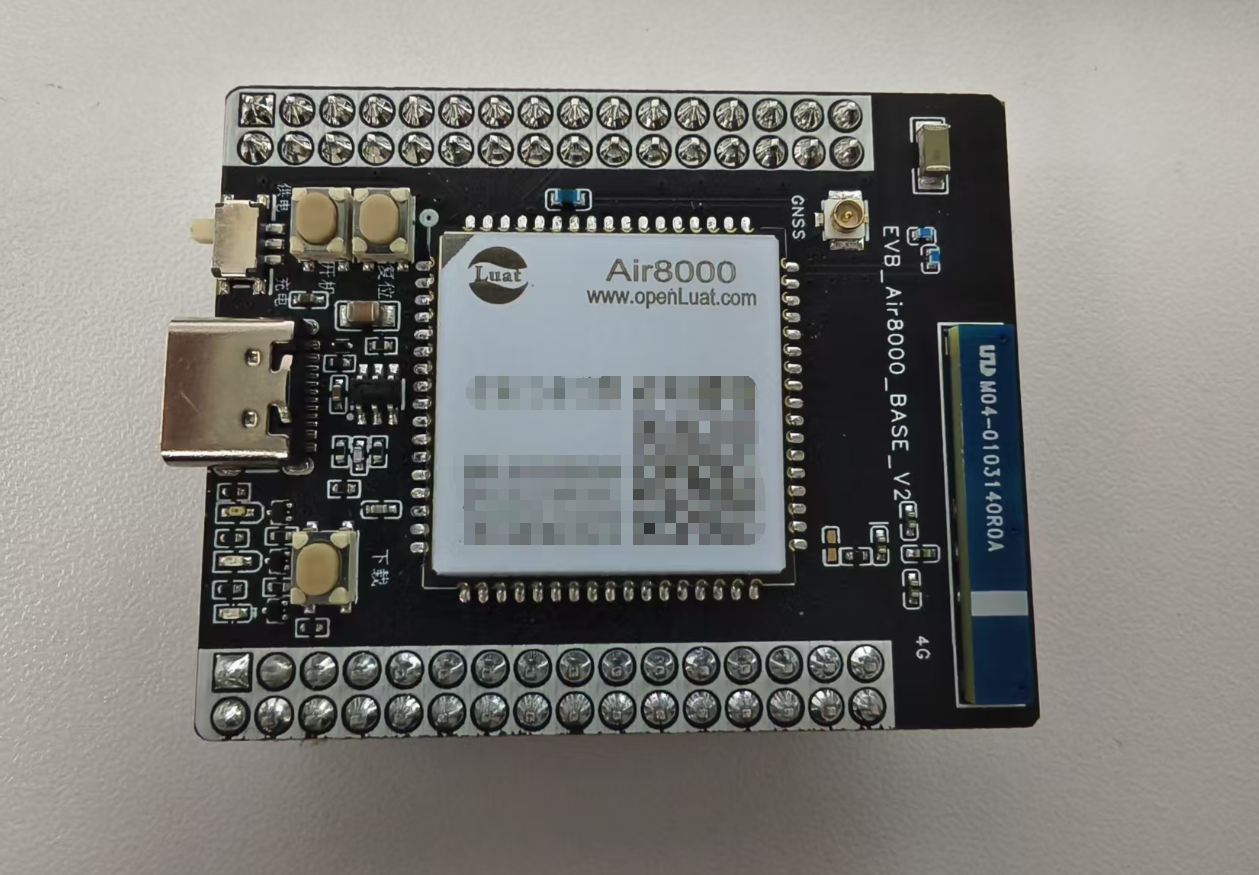
1、 Air8000 核心板
2 、GPS 天線
四、準備軟件環境
1. 燒錄工具Luatools;
2. 內核固件文件(底層 core 固件文件):LuatOS-SoC_V2005_Air8000;此頁面有新版本固件的話選用最新版本固件。
3. LuatOS 需要的腳本和資源文件:https://gitee.com/openLuat/LuatOS/tree/master/module/Air8000/demo/GPS
4. lib 腳本文件:使用 Luatools 燒錄時,勾選 添加默認 lib 選項,使用默認 lib 腳本文件;
準備好軟件環境之后,接下來查看如何燒錄項目文件到 Air8000 開發板中,將本篇文章中演示使用的項目文件燒錄到 Air8000 開發板中。
五、GPS 軟硬件參考
本教程使用 api 接口為:
https://docs.openluat.com/osapi/core/libgnss/
5.2 GPS 硬件設計
GPS 在硬件設計中天線部分是比較關鍵的,可以參考這篇文章:Air8000 GNSS 硬件設計指導:https://docs.openluat.com/air8000/luatos/hardware/design/gnssant/
在核心板上內置 GNSS ipex 連接器,同時內置 3.3V LDO, 用于有源天線供電。因此可以使用外部有源天線直接連接 GNSS 連接器。
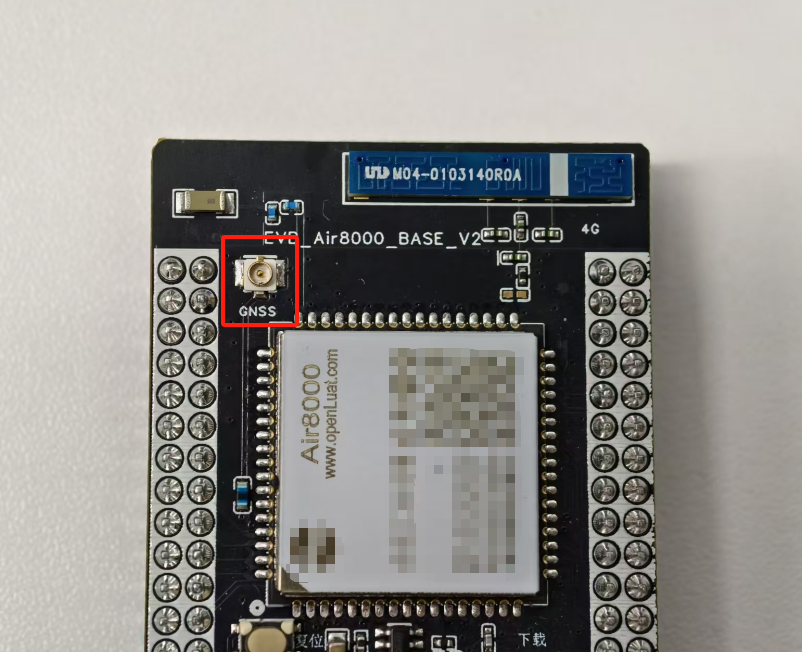
注意:目前有源天線供電僅支持 3.3V 有源天線,請注意連接的有源天線的供電范圍。
六、代碼示例介紹
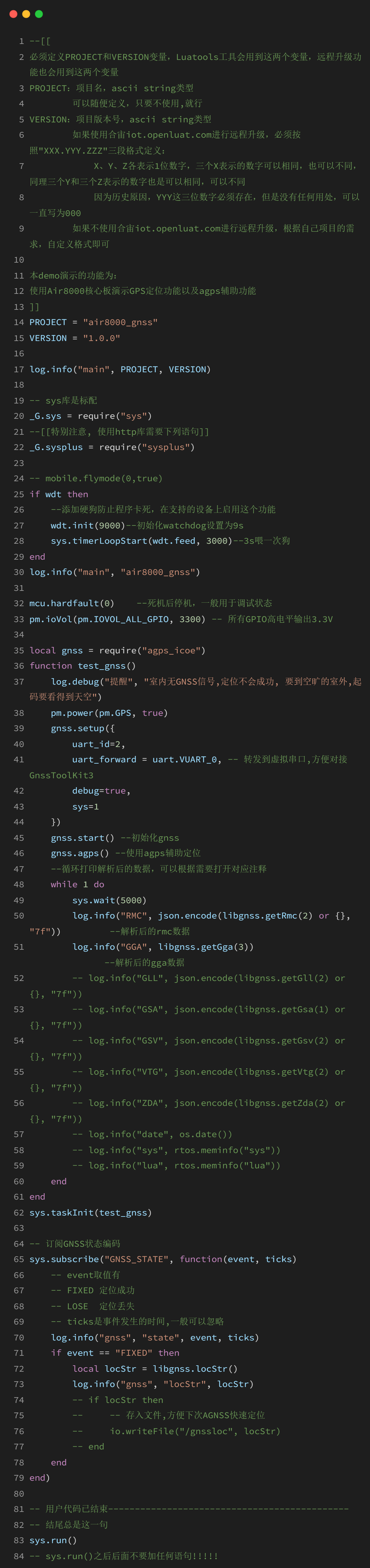
6.1 軟件代碼介紹

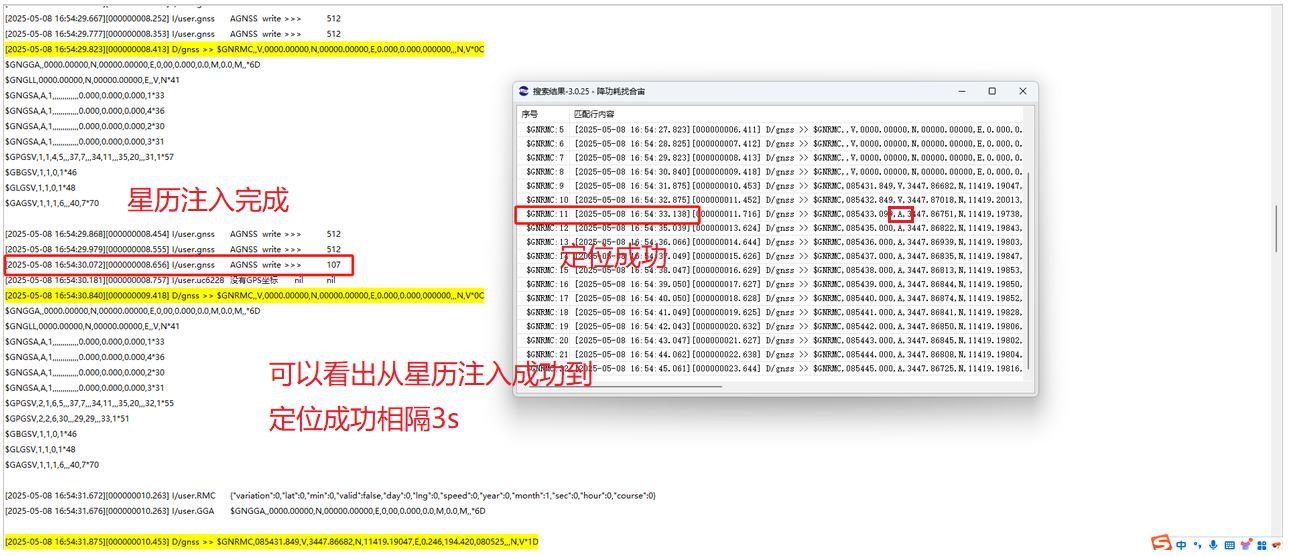
6.2 效果展示
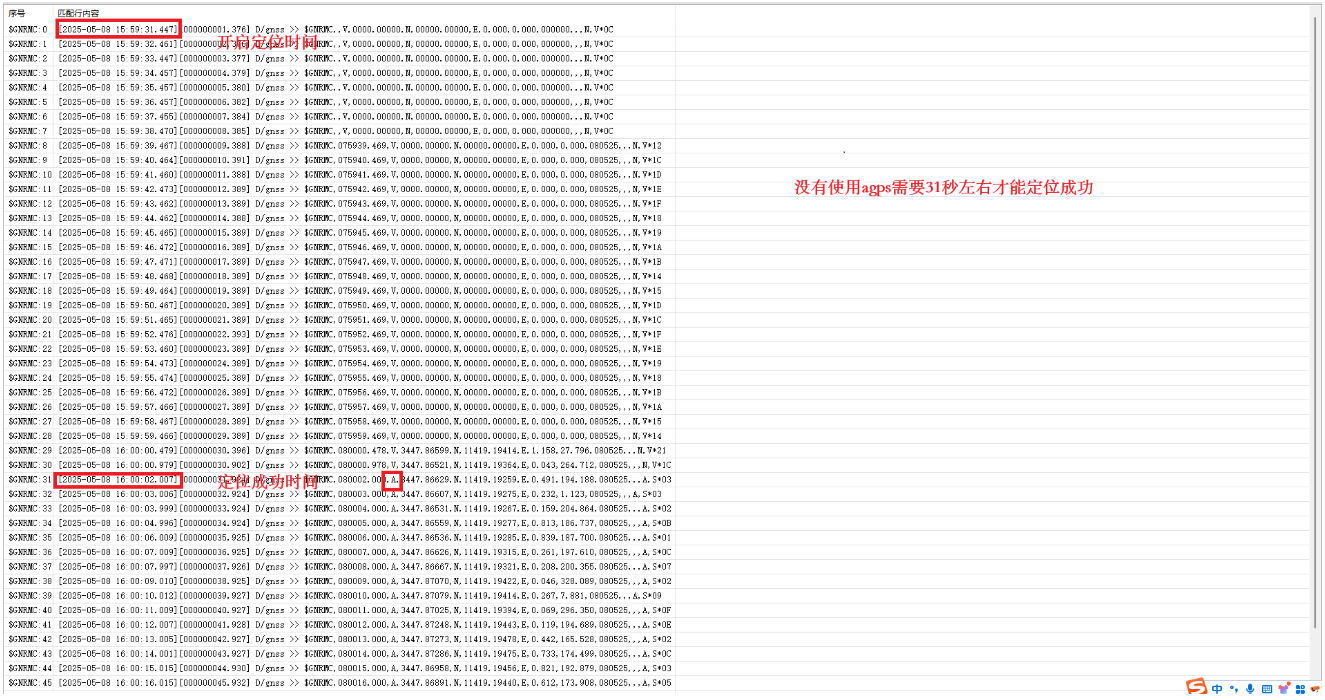
可以看到沒有使用 agps 輔助定位需要 31 秒左右才能定位成功。使用 agps 后,注入星歷數據后 3s 左右就能定位成功
七、總結
本教程演示了 Air8000 如何使用 AGPS 來進行快速定位,并講解了 AGPS 的實現原理以及注意事項。
八 、GPS 常見名詞解釋
[1]GNSS:混合定位,不同于 GPS 定位,狹義上講的 GPS 系統,單指美國的 24 顆 GPS 衛星以及地面上 1 個主控站、3 個數據注入站和 5 個監測站及作為用戶端的 GPS 接收機組成的一整套系統。GNSS 是指通過觀測 GNSS 衛星獲得坐標系內絕對定位坐標的測量技術。 GNSS 是所有導航定位衛星的總稱,凡是可以通過捕獲跟蹤其衛星信號實現定位的系統,均可納入 GNSS 系統的范圍。國內用戶接觸最多的應該是美國的 24 顆 GPS 衛星,以及中國的北斗衛星(截至到 2023 年 5 月 17 日 10 時 49 分,中國已有五十六顆北斗導航衛星),其余還有俄羅斯GLONASS、歐盟GALILEO、 日本的準天頂衛星系統、印度的 IRNSS(獨立的區域導航系統,覆蓋印度領土及周邊 1500 km 范圍內,提供定位精度優于 20 米的服務)等其余定位系統。
[2]冷啟動:指在一個陌生的環境下啟動 GPS,直到 GPS 芯片和可用衛星聯系并且計算出坐標的過程。以下幾種情況開機均屬冷啟動:
1. 初次開機使用時;
2. 電池耗盡導致 GPS 芯片內星歷信息丟失時;
3. 關機狀態下將接收機移動 1000 公里以上距離。
也就是說,冷啟動是通過硬件方式的強制性啟動,因為物理距離較遠,或者時間間隔很久,GPS 芯片已經把內部的星歷信息清除掉,或者內部的星歷信息完全失效。GPS 接收機失去衛星參數,或者已經存在的參數和實際接收到衛星參數相差太多,導致 GPS 芯片無法靠星歷快速搜星,所以必須從新獲得衛星提供的坐標數據。
這也是很多定位器(譬如車載定位器)啟動后,搜星時間長、定位耗時久的原因
[3]熱啟動:指在上次關機的地方沒有過多移動過,且距離上次定位時間小于 1 個小時。再次定位時,GPS 芯片通過軟件的方式,可以繼續使用之前的星歷快速搜星,實現秒定位。PS:普通的 GNSS 芯片,星歷最長有效期為 12 小時,故此星歷過期后,GPS 芯片無法使用星歷實現快速定位。
[4]溫啟動:指距離上次定位時間超過 1 個小時的啟動,搜星定位時間介于冷啟動和熱啟動之間的情況。
譬如某時間使用過 GPS 定位實現 3D FIX,GPS 芯片內部生成星歷(或者外部灌入 AGPS 數據),那么在 1 小時內啟動 GPS 芯片進行定位的行為就屬于溫啟動。啟動后,GPS 芯片首先會輸出上次的位置信息。因為上次關機前的經緯度和高度已知,但由于關機時間過長,衛星狀態發生了變化,之前 3D FIX 時的衛星接受不到了,所以星歷中參數中的若干顆衛星已經和 GPS 接收機失去了聯系,GPS 芯片需要繼續搜星補充位置信息,所以搜星的時間要長于熱啟動,短于冷啟動。
[5]星歷:是用于描述太空飛行體位置和速度的表達式———兩行式軌道數據系統。衛星、航天器或飛行體一旦進入太空,即被列入 NORAD 衛星星歷編號目錄。列入 NORAD 衛星星歷編號目錄的太空飛行體將被終生跟蹤。衛星、火箭殘骸等飛行體成為太空垃圾時,仍被列入 NORAD 衛星編號目錄,直到目標消失。衛星星歷以開普勒定律的 6 個軌道參數之間的數學關系確定飛行體的時間、坐標、方位、速度等各項參數,具有極高的精度。衛星星歷能精確計算、預測、描繪、跟蹤衛星、飛行體的時間、位置、速度等運行狀態;能表達天體、衛星、航天器、導彈、太空垃圾等飛行體的精確參數;能將飛行體置于三維的空間;用時間立體描繪天體的過去、現在和將來。衛星星歷的時間按世界標準時間(UTC)計算。衛星星歷定時更新。
[6]AGPS:輔助全球衛星定位系統(英語:Assisted Global Positioning System,簡稱:AGPS)指的是一種 GPS 的運行方式。它可以利用地面基地站的資訊,配合傳統 GPS 衛星,讓定位的速度更快
[7]有源天線:通常對于設備或車載機而言,由于設備與 GPS 接收模塊之間往往有距離,考慮到安裝的便利性可能會有超過 1 米的距離,在這種情況下我們只能選擇有源 GPS 天線,由于天線長度的信號衰減需要進行補償,一般有兩級低噪聲放大器(LNA)進行天線前端信號放大,放大后的信號經電纜輸出,電纜同步提供 LNA 所需要的直流電壓
由于天線收到的信號在有源天線接受頭內完成信號接受與天線放大,并且遠離 GPS 設備或其他電器設備,干擾源最小,而且安裝位置由于天線距離延長安裝位置可以選擇非常理想的環境,所以實際使用時往往感覺信號較強
[8]無源天線:使用無源 GPS 天線時,由于只有一個陶瓷片接收天空的衛星信號,直接連接到模塊的 RF-IN 腳,這種聯接方式結構簡單,而且標準的 25254 的陶瓷片成本低廉,技術成熟,占空體積小,適合于強調緊湊型空間 GPS 導航產品,藍牙 GPS,手機 GPS 及其他小型 GPS 消費類產品。
這種天線的布局是從天線的引腳直達模塊的 RF-IN 腳,這根導線需要進行 50 歐阻抗匹配,而且在天線附近不能有電磁干擾,對 PCB 的設計及整機的 EMI 設計要求較高,但如果設計得優良的無源天線 GPS 產品同樣有非常好的表現效果,而且功耗比較低,無需考慮天線自身的功耗。
[9]半邊天以及開拓地帶:GPS 衛星運行在距地 36000KM 的軌道上,信號強度相當弱(GPS 衛星的功率有多大?)。GPS 的民用 C/A 碼從衛星發出來的時候信號只有 27W 左右,達到地球的時候在-158.5dBW 以上。用對數形式表示可能不直觀,換算成十進制等于將近 0.0000000000000001W,相當小。所以,只有室外開闊的、無遮擋、晴好的地方,才能搜到更多的衛星,SNR 值更高(陰天都會有影響哦),GPS 芯片才能更快、更好的實現定位。
半邊天一般指樓宇內窗邊,打開窗戶,只能搜到一半天空的衛星。
[10]定位糾偏:OpenLuat 的所有 GNSS 模塊均使用國際標準WGS-84坐標系,所以開發者在國內常見地圖定位時,會發現與實際情況有幾十米甚至上百米的誤差。這并非模塊問題, 而是國內地圖采用了非標坐標系所致。 國內常見地圖如高德地圖使用GCJ-02坐標系, 百度地圖使用BD-09坐標系,故此開發者需要對模塊輸出的經緯度進行加偏處理,才能在國內的地圖上實現精確定位,坐標轉換可在合宙提供的坐標轉換網站上直觀的展示處理
[11]重捕:是指接收終端在丟失所接收信號狀態下,從重新接收到信號開始,至終端設備輸出符合定位精度要求的定位結果所需的時間。失鎖重捕時間反映了在接收機信號失鎖,定位中斷后重新恢復定位的速度。失鎖重捕時間短的接收機在易中斷環境中(如隧道等)的定位性能好,因此失鎖重捕時間可以有效評估車載終端的性能
[12]低噪聲放大器:主要用于接收信號的前端,放大天線從空中接收到的微弱信號,降低噪聲干擾,以供系統解調出所需的信息數據
今天的內容就分享到這里了~
審核編輯 黃宇
-
定位
+關注
關注
5文章
1554瀏覽量
36563 -
AGPS
+關注
關注
0文章
15瀏覽量
12989 -
LuatOS
+關注
關注
0文章
134瀏覽量
2588
發布評論請先 登錄
Air8000 LuatOS exgnss擴展庫應用秘籍:定位開發避坑指南!
LuatOS exgnss擴展庫實戰進階:GNSS功能開發全流程!
LuatOS中PWM實現LED亮度調節與呼吸燈的實戰教程
LuatOS下Air8000 AGPS輔助定位教程與實踐
LuatOS下GNSS定位開發實戰:初識定位、NMEA解碼與位置追蹤上報
嵌入式開發新選擇:LuatOS腳本框架入門教程

如何實現3秒定位?GNSS模組實戰指南大公開
GNSS模組實戰指南:3秒精準定位全揭秘!
定位速度狂飆!AGPS開源助力GPS應用3秒鎖定坐標!
零基礎學習LuatOS編程:快速上手開發實戰教程!
GPS領域新動態:AGPS功能開源,定位速度突破3秒極限!
LuatOS編程基礎教程:手把手帶你入門物聯網開發!
快速入門——LuatOS:sys庫多任務管理實戰攻略!
全棧開發進階指南:LuatOS-log庫從入門到實戰!
解鎖LuatOS-log庫:全棧工程師的日志管理實戰課!





 工商網監
工商網監
評論